- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
永磁同步直线电机硬件在环实时仿真平台
录入:edatop.com 点击:
Hardware-In-The-Loop Real Time Simulation Platform for PMLSMs
上海电气集团股份有限公司中央研究院 王振滨
应用领域:控制与仿真
挑战:采用LabView8.6.1和两个cRIO软硬件平台快速搭建一套永磁同步直线电机硬件在环实时仿真系统。
应用方案:使用NI公司的LabView8.6.1、cRIO9074和cRIO9004软、硬件平台成功搭建一套永磁同步直线电机硬件在环实时仿真平台。其中cRIO9074和cRIO9004分别用于永磁同步直线电机控制器仿真和永磁同步直线电机模型仿真,两者采用高速数、模数据采集卡进行数据交换,且其核心算法全部在FPGA中完成,具有50us级的高实时性特点。
使用的产品:LabView8.6.1/RT/FPGA;cRIO9074,cRIO9004,9104;两块9401;9215,9264,9205各一块
介绍:
永磁同步直线电机由于其高速度、高精度和高刚度等优异性能,目前受到国内外广泛关注。但与传统旋转电机相比,直线电机试验难度大、危险性高,如操作不当极易发生飞车,造成人身和财产损失。因此急需搭建一套永磁同步直线电机的硬件在环实时仿真平台。该仿真平台的快速成功搭建,可以预先验证直线电机的控制算法,从而便于提早发现潜在错误,节约调试成本、缩短调试周期和减小事故发生概率。
正文:
一、 引言
直线电机驱动的高速直线运动单元取消了从伺服电机到工作台之间的中间传动环节,把运动单元的传动链缩为零,称为“零传动”。该传动方式既可简化结构,又可提高直线运动单元的速度、加速度、灵敏度、刚度和精度。在高速直线运动单元中,由直线电机直接驱动代替传统旋转电机加滚珠丝杠副驱动方式已是大势所趋,目前直线电机已经被广泛应用于工业、民用、军事及其它各种直线运动的场合。国外著名的机床公司,如Siemems,Fanuc等在其高端数控机床中无例外地全部使用直线驱动方式,使得加工出产品的精度和加工速度都得到极大提高。永磁同步直线电机由于无需电励磁、推力密度大和效率高等优点事实上已成为今后直线电机的发展方向。
与传统旋转电机相比,直线电机由于磁路是开放的,负载与直线电机之间无机械传动装置缓冲,所有扰动都直接加载到电机端,加上直线电机特有的端部效应,一方面给直线电机的控制带来极大的挑战,另一方面在调试与操作过程中稍有不慎极易出现飞车的危险性,造成人身和财产损失。因此本文采用LabView8.6.1和cRIO9074和cRIO9004软硬件平台,搭建了一套永磁同步直线电机的硬件在环实时仿真平台。该平台运用矢量控制算法,实现位置环、速度环和电流环三环或速度环、电流环二环闭环控制。该平台能够模拟永磁同步直线电机的多种运动工况,快速、无差地跟踪速度和位置给定信号,仿真结果与科尔摩根系统类似,验证了算法的正确性。
二、 永磁同步直线电机数学模型
永磁同步直线电机的dq轴方程:
![]() (1)
(1)
![]() (2)
(2)
式(1)、(2)中ud,uq,id,iq,Ld,Lq 分别表示直线电机直、交轴电压、直、交轴电流和直、交轴电感,R为定子电阻,
![]() 为直线电机永磁体磁链,V为直线电机的移动速度,
为直线电机永磁体磁链,V为直线电机的移动速度,
![]() 为节距,P为极对数。
为节距,P为极对数。
永磁同步直线电机的推力方程为:
![]() (3)
(3)
式中,Fe为直线电机的电磁推力。
永磁同步直线电机的运动学方程为:
![]() (4)
(4)
![]() (5)
(5)
式(4)中,Fd为直线电机的阻力(含磁阻力和负载产生的阻力),Bv为粘滞摩擦系数,m为直线电机(含负载)质量。式(5)中,x为直线电机移动位移。
三、 永磁同步直线电机矢量控制原理
交流电机的矢量控制是1971年由德国F.Blaschk等人提出的。其基本思想是在交流电机上模拟直流电机的转矩控制规律。在磁场定向坐标上,将电流矢量分解为产生磁通的励磁电流和产生转矩的转矩电流,使两个电流分量相互垂直、彼此独立,因此可以分别加以控制。在永磁同步电机矢量控制系统中,转子磁极的位置用来决定逆变器的触发信号,以保证逆变器输出频率始终等于转子角频率,因此,永磁同步电机的矢量控制为自控运行的矢量控制。
在矢量控制中定子电流的控制模式是多种多样的,且电流控制模式和转子的几何结构影响着永磁同步电机的性能和变换器的容量。本文采用常见的直轴电流id=0模式,该控制方式突出的优点是没有电机直轴电枢反应,不会引起永磁体的去磁现象,且可以同时实现直线电机每安培最大推力控制,只要控制好定子电流的幅值和相位,就可以得到满意的推力控制特性。本文所提出的矢量控制原理框图如图1所示。
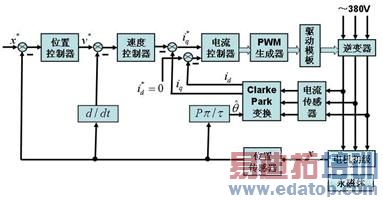
图1 矢量控制原理框图
四、 永磁同步直线电机硬件在环实时仿真平台
借助National Instruments公司的LabVIEW 8.6.1、cRIO9074、cRIO9004和9401、9215、9264、9205高速数、模采集卡软、硬件平台,在较短的时间内搭建了一套永磁同步直线电机硬件在环实时仿真平台。该平台运用矢量控制算法,根据需要可以实现位置环、速度环和电流环三环或速度环和电流环二环闭环控制,电流最高采样频率达到20kS/s(周期50us),高于科尔摩根直线电机驱动器电流采样率16kS/s(周期62.5us)。系统的位置和速度输出可以快速无差地跟踪给定的位置和速度信号,精度达到几个微米级别,可以在线调节控制器参数和直线电机负载,仿真结果与实际科尔摩根系统类似。该平台的主要功能模块有:参数设置模块、直线电机模型仿真模块、直线电机控制器仿真模块、图形显示模块和数据记录与分析模块。该平台的示意图如图2所示:
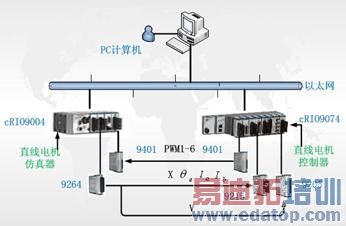
图2 永磁同步直线电机硬件在环实时仿真平台示意图
参数设置模块: 用来设置直线电机参数、负载系数、粘滋磨擦系数、直流母线电压、采样频率、初始控制器参数、三角载波频率与幅值、PWM模块中的死区时间等。其中直线电机参数、负载系数、粘滋磨擦系数、直流母线电压用于直线电机模型仿真模块(采样频率100kS/s),初始控制器参数、三角载波频率与幅值、PWM模块中的死区时间用于直线电机控制器仿真模块(采样频率20kS/s)。这部分子程序是在cRIO9074、cRIO9004的RT控制器中开发成功。
直线电机模型仿真模块:采用直线电机数学模型和运动方程来模拟实际直线电机的运行状态,把得到的直线电机各项运行数据送到直线电机控制器仿真模块。根据参数设置模块获得的直线电机参数,进行归一化处理,得到直线电机归一化参数。采集由直线电机控制器仿真模块发来的6路PWM信号(采用高速数字采集卡9401),结合直流母线电压和当前直线电机相电流正、负方向信号,计算出直线电机三相相电压,进行Clarke-Park变换,得到dq轴电压。然后根据归一化的直线电机dq轴方程计算出下一步直线电机dq轴电流、三相相电流、电磁推力。根据直线电机运动方程计算直线电机的加速度、速度、位移、电角度等信号,通过高速模拟输出卡9264,把上面计算出的两路相电流、速度、位移、电角度共5路信号送到直线电机控制器仿真模块。这部分子程序是在cRIO9004(内插9401和9264)的FPGA中开发成功。该模块的子程序框图如图3所示。
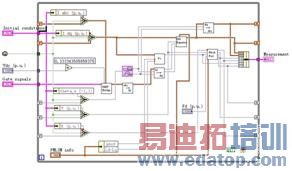
图3 永磁同步直线电机模型仿真子程序框图
直线电机控制器仿真模块:该模块包含位置环、速度环、电流环三环和速度环、电流环二环闭环控制两个子程序,实现对模拟的直线电机进行速度或位置的闭环控制功能。以位置环闭环控制为例,来说明该模块的主要功能。采用9215和9205模拟采集卡采集到直线电机模型仿真模块发来的直线电机位置、电角速度、两路直线电机相电流和速度信号。根据位置给定信号和采集到的位置反馈信号,求出偏差值送入位置环PI调节器,其输出作为速度给定信号。以此类推,经过速度环PI调节器、电流环PI调节器(含d、q轴)得到d、q轴给定电压信号,通过Clarke-Park逆变换,得到三相相电压调制信号。这些信号与三角载波信号进行比较,得到包括正、反6路PWM信号(算法考虑了死区效应,防止逆变器上、下桥臂短路),通过9401高速数据采集卡输出到直线电机模型仿真模块,至此整个直线电机位置闭环控制得以实现。这部分子程序是在cRIO9074(内插9401、9205和9215)的FPGA中开发成功。位置环子程序程序框图和前面板图分别如图4、5所示。
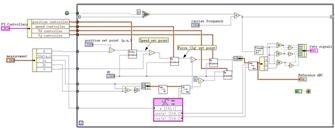
图4 永磁同步直线电机位置环控制子程序框图
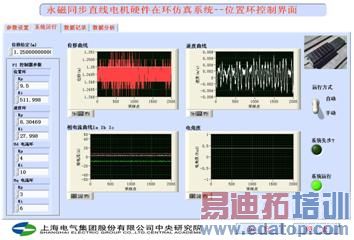
图5 永磁同步直线电机位置环控制子程序前面板图
图形显示模块:实时动态显示直线电机的位移、速度、三相相电流、位置角度、PWM波形曲线。通过FIFO实现直线电机模型仿真模块和直线电机控制器仿真模块的FPGA与RT控制器进行数据实时交换。这部分子程序是在cRIO9074、cRIO9004的RT控制器中开发成功。
数据记录与分析模块:存取直线电机的位移、速度、三相相电流、位置角度、PWM波形等数据,分析直线电机电流、电压谐波分布等,为进一步优化算法提供数据。这部分子程序同样是在cRIO9074、cRIO9004的RT控制器中开发成功。
三、仿真实例
3.1 平台的软、硬件组成
永磁同步直线电机硬件在环实时仿真平台软、硬件组成如下:
软件平台:LabVIEW8.6.1/RT/FPGA
硬件平台:
l cRIO9074、9401、9205和9215组成控制器仿真硬件平台,
l cRIO9004、9104、9401和9264组成仿真器仿真硬件平台
l 一台PC计算机,
l 室内网络。
图6给出了永磁同步直线电机的硬件在环实时仿真与试验平台实物图。

图6 永磁同步直线电机硬件在环实时仿真与试验平台实物图
3.2 永磁同步直线电机参数
永磁同步直线电机参数见表1。
表1 永磁同步直线电机参数
物理量 | 定子电阻(
| 直轴电感(H) | 交轴电感(H) | 永磁体磁链(Wb) | 质量 (Kg) | 极对数 | 极距 (m) | 粘滞摩擦系数(N.s/m) | 负载 (N) |
数值 | 1.82 | 0.0185 | 0.0178 | 0.279 | 10 | 1 | 0.016 | 0.01 | 843.75 |
3.3 仿真分析
图7给出了两种不同的速度环运行方式,自动方式和手动方式,前者速度给定在
![]() 0.25m/s周期跳变,后者保持速度给定值0.25m/s不变。从图7中不难发现通过调节速度环、电流环控制器参数为一组合适参数,如表2所示,仿真的直线电机运行速度能够在10ms左右时间内快速跟踪速度给定,且稳态误差在
0.25m/s周期跳变,后者保持速度给定值0.25m/s不变。从图7中不难发现通过调节速度环、电流环控制器参数为一组合适参数,如表2所示,仿真的直线电机运行速度能够在10ms左右时间内快速跟踪速度给定,且稳态误差在
![]() 2um/s内。
2um/s内。
表2.速度和电流环控制器参数
速度环 | d轴电流环 | q轴电流环 | |
KP | 1.105 | 16 | 6 |
KI | 11.397 | 5 | 6 |
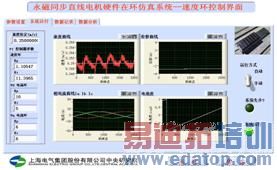
 A)自动运行方式 B)手动运行方式
A)自动运行方式 B)手动运行方式
图7永磁同步直线电机速度环控制子程序前面板图
图8给出了直线电机仿真器中的PWM波形图。图中可以明显看出三对正、反相PWM波形的上下沿之间有死区延时,这样可以避免逆变器上下桥臂中的IGBT同时导通,造成逆变器输出电源正、负极短路危险。
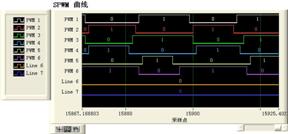
图8 带死区延时的PWM波形
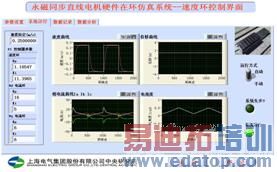
图9给出了位置给定值分别为0.25、1.25和3.25m时位置环仿真结果,图中下面的速度曲线对应于上面的位置给定曲线,位置环、速度环和电流环控制器参数如表3所示,位置环界面参见图5。
表3.位置、速度和电流环控制器参数
位置环 | 速度环 | d轴电流环 | q轴电流环 | |
KP | 9.5 | 8.304 | 4 | 3 |
KI | 511.998 | 27.998 | 10 | 6 |
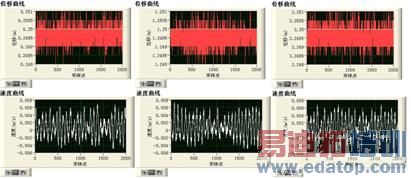
图9 位置给定值、位置跟踪值和速度稳态值
从图9可以得出,在0.25~3.25m较大范围内的位置给定值,系统的位置跟踪误差保持在-1.5~1um之间,且速度稳态值在-0.005~0.007um/s范围内波动,系统达到较为理想的伺服运行状态。本文的直线电机参数均取自于实际直线电机参数,运行结果与科尔摩根系统较为一致,从而验证了本文所提算法的正确性。
四、结论
利用NI公司的虚拟仪器LabVIEW 8.6.1/RT/FPGA、cRIO9074与cRIO9004/9104软硬件平台,在较短的时间内搭建了一套永磁同步直线电机硬件在环实时仿真平台,比采用其它传统软件开发平台缩短了至少1倍以上的开发时间。该平台的成功开发,使得在硬件在环条件下可以事先测试永磁同步直线电机的控制器算法,因而在实际驱动器开发过程中,必将节约成本和缩短研发时间,同时降低事故发生的概率。

