- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
直流电子负载的光伏 MPPT 算法
录入:edatop.com 点击:
许多光伏(PV)器件――包括光伏板和聚光光伏(CPV)模块等――都需要进行户外测试,以验证其设计的正确性、耐用性和安全性。在测试户外光伏器件输出功率时,一种较为经济的方法是使用直流电子负载(eload),直流电子负载能够以较低的成本提供大功率处理能力。
通常,户外光伏测试涉及到的一个主要函数就是最大功率点跟踪(MPPT)。但由于电子负载是通用仪器,光伏测试工程师需要在测试软件中使用算法来执行最大功率点跟踪。幸运的是,有许多最大功率点跟踪算法可供选择,而且在公开发表的论文中有超过 19 篇论述了各种最大功率点跟踪算法的实施与执行 [1]。但是,这些算法都是针对太阳能逆变器设计的。不同测试系统的逆变器各不相同,所以适用于逆变器的最大功率点跟踪算法未必适合光伏测试系统。本文介绍了一种非常适用于通过电子负载执行光伏测试的最大功率点跟踪算法,而且还探讨了如何应用该算法及其为何适用于户外光伏测试系统的最大功率点跟踪。
在逆变器和电子负载中实施特定大功率点跟踪算法的最大差异是 I/O 时延。在逆变器中,最大功率点跟踪算法在内部微处理器上运行,该微处理器可以在几微秒内进行测量、计算和负载调整。使用定制软件进行同样的操作时,由于计算机和电子负载之间存在不可避免的 I/O 时延,测量的时间很容易超过几十毫秒。这个 I/O 时延便是影响跟踪速度的主要瓶颈。为此,我们使用以下三项标准来选择和修改本文中讨论的最大功率点跟踪算法,充分满足光伏测试系统的需求:
1.更少的 I/O 处理次数:由于 I/O 处理次数影响最大功率点跟踪的速度,因此 I/O 处理的数量必须少,以保证在任何环境条件下都具有足够的跟踪响应。
2.执行的简便性:如果光伏测试中存在典型的时间和预算限制,而且您不想花费太多时间实施复杂的最大功率点跟踪算法,因为这只是测试计划中的一小部分。
3.MPP 测量精度:测试数据必须精确、可靠,以便恰当地验证光伏设计的性能。
在介绍可满足上述标准的算法之前,我们先简单地讨论一下电子负载。电子负载是一个可以接收和测量功率源(电源或光伏器件)输出功率的工具。同可变电阻器一样,电子负载可以进行调节来控制正在接收的功率大小。电子负载可以测量通过的压降和正在接收的电流。其典型的工作模式有三种:恒定电压、恒定电流和恒定电阻。即使电子负载连接的电源输出功率发生变化,电子负载的模式设置都将保持不变。例如,如果电子负载连接到一个光伏板的输出端并设置为 25 V 的恒压(CV)模式,那么当光伏板的 I-V 曲线发生变化时,该电子负载会通过调节其内部的电阻来保持 25 V 的恒定电压。如果光伏板的最大电压(Voc)降至 25 V以下,那么电子负载将断开,它两侧的电压将等于 Voc 的实际值。在光伏测试中,电子负载经常使用恒压(CV)模式,因此本文将使用这种模式来定义算法。
电子负载最大功率点跟踪算法
这种通过电子负载执行最大功率点跟踪的算法是电导增量(IC)算法的修正版,我们称之为电子负载电导增量(ICE)最大功率点跟踪算法。如欲了解逆变器 IC 算法的详细信息,请查看论文“Maximum Photovoltaic Power Tracking: an Algorithm for Rapidly Changing Atmospheric Conditions(最大光伏功率跟踪:适用于快速变化的大气条件的算法)”[2]。ICE 算法是通过比较光伏器件输出的增量电导和瞬时电导来进行运算。这些值显示了 I-V 曲线的测量结果变化,从而告诉我们是否跟踪到最大功率点(MPP),如果没有的话,能够通过什么方法来接近曲线并找到 MPP。ICE 算法中用来跟踪最大功率点的 V 和 I 的数学关系如下:
在最大功率点上 dP/dV = 0
在最大功率点右侧 dP/dV < 0
在最大功率点左侧 dP/dV > 0
其中 dP 是指功率变化,并且等于 d(IV)。
当然,我们无法精确地计算出 dI、dV 或 dP。但是我们可以使用以下关系式:∆P = Pn – Pp、∆V = Vn – Vp 和 ∆I = In – Ip 来估算近似值,此处“P”代表之前测得的值,“n”代表新测得的值。使用上述关系式我们可以得出:是处在 I-V 曲线的最大功率点(MPP)上还是在其左侧(最大功率点的电压值或 Vmp 处于较低的电压电平)或其右侧(Vmp 处于较高的电压电平)。请见图 1。
图 1 光伏 I-V 曲线
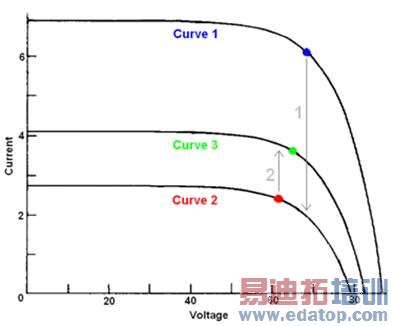
图中文字中英对照:
Current Curve 1 Curve 3 Curve 2 Voltage | 电流 曲线 1 曲线 3 曲线 2 电压 |
如图 1 中的 ICE 实例所示,使用电子负载在三条 I-V 曲线上执行最大功率点跟踪。电子负载设置为恒压(CV)模式。每条曲线上的彩色点代表该曲线的最大功率点(MPP)。起始点为曲线 1 上的最大功率点(蓝点)。电子负载的 CV 设置为 Vmp,而且我们已测量和存储了该点的电流和电压值。一旦发生变化,便由曲线 1 转到曲线 2。如果现在测量电流和电压,此时电压保持不变(因为该电子负载是恒压模式),但是电流会发生变化,因此可知我们已不在最大功率点上。由于电子负载是恒压模式,我们现在处在灰色箭头“1”所指的曲线 2 的相应点上。通过下列关系式,我们可知道应选择什么方法来找到新的最大功率点:如果 dI (使用 dI ≈ ∆I = In – Ip 来估算)是负值,则我们现在处于最大功率点的右侧,需要向左侧移动(降低 CV 设置),反之,如果 dI 是正值,便进行相反的操作。在此实例中,由曲线 1 移到曲线 2,dI 将变成负值,因此需要降低 CV 设置以便找到新的最大功率点。我们可通过设置某个电压步长(称为 Vinc)来降低 CV 值。现在,我们将处在一个不同的电压和电流电平上,所以需要使用这两个参数来决定下一步的操作。由于刚才在曲线 2 上向最大功率点移近了一些,那么 dP 是正值而 dV 为负值,因此仍需向最大功率点的左侧移动。继续增加 CV 设置直到 dP 值等于零,这意味着该点将不再有斜率(实际上不可能达到 dP=0,但稍后将解释这个问题)。达到曲线2 的最大功率点之后,我们将转向曲线 3,那么我们现在位于灰色箭头“2”所指的曲线 3 上。因为电压仍保持不变,我们需要再次通过测量电流变化来检测所发生的变化。这时 dI 是正值,因此可知现在我们处于最大功率点的左侧,需要通过 Vinc 增加恒压(CV)设置(移向曲线的右侧),来找到最大功率点。
可能您已注意到:由于 ∆P 和 ∆V 只是近似于 dP 和 dV,那么 dP/dV = 0 (∆P/∆V = 0)等式就不能实现。事实上,由于我们正在通过逐步升高或降低电压来寻找最大功率点,dV 将始终由 Vinc 的大小来决定,我们无法从其得知何时处于最大功率点,所以真正需要关注的只是 dP。我们需要找出某个误差值 E,如果满足 E ≥ dP ≥ -E 的条件,那么电子负载就是在最大功率点(MPP)上。如果 E 值太小,则 ICE 算法的结果将在 MPP 左右摆动。
请参见图2,图中显示了如何执行 ICE 最大功率点跟踪算法的流程图。
图 2 修正后的电导增量流程图
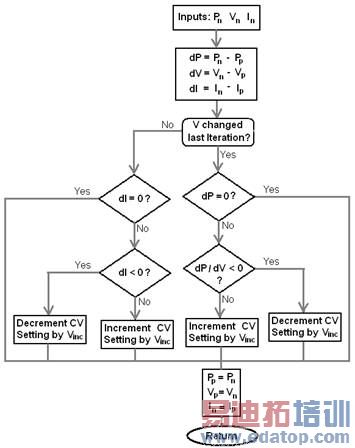
图中文字中英对照:
Inputs: Pn Vn In V changed last lteration? Yes No Decrement CV Setting by Vinc Increment CV Setting by Vinc Return | 输入: Pn Vn In 上次迭代电压是否改变? 是 否 通过 Vinc 降低 CV 设置 通过 Vinc 提高 CV 设置 返回 |
在图 2 所示的 ICE 流程图中,写着“上次迭代电压是否改变”的方框正在检查在此算法的上次迭代过程中恒压(CV)设置是否发生改变。如果没有变化,说明我们正好处在上次迭代的最大功率点上,因此可知上次迭代和本次迭代之间电压没有变化。我们只需测量电流即可确定是否仍处在最大功率点上。如果不是,那么我们需要通过什么方法调整 CV 设置才能找到最大功率点。这样可以减少 I/O 处理次数,如前所述,I/O 处理次数是在测试系统中执行最大功率点跟踪的主要瓶颈。
我们可以通过两种方法来确定 IC 算法的最初点或起始点。第一种方法是通过在 Voc 到 0 V 之间步进电子负载电压来执行 I-V 扫描,并在每次步进中测量电流和电压。以数组的方式保存电流和电压并将这些数组相乘得出每次步进的功率数组。找到功率步进数组中的最大值,它就是最初 I-V 曲线的最大功率点。将在 MPP(即 Vmp)上测得的电压值作为电子负载和 ICE 算法的最初恒压起始点。
另一种方法稍微简单但精度较低,即测量 Voc 并将恒压起始点设置为测得的 Voc 值乘以 0.75。该方法算出的点通常不是最初曲线的最大功率点,但是比较接近。当曲线发生变化时,IC 算法将跟踪至新曲线的实际最大功率点。
选择 Vinc 值时,您需要考虑多种因素,比如光伏器件的功率范围、天气变化、理想的跟踪速率和期望的最大功率点精度。选择的 Vinc 值越大,跟踪最大功率点的速度越快,选择的 Vinc 值越小,测得的最大功率点越精确。dI 的幅度也可提供与最大功率点距离的信息。为了加快最大功率跟踪速度,您可以用变化幅度乘以 Vinc 值,来更高效地执行最大功率跟踪。如果 dI 值较大,则可以选择较大的 Vinc,因为您知道距离最大功率点还比较远。反之亦然:如果 dI 值较小,则应使用较小的 Vinc,因为只需一点变化即可找到最大功率点。
基础比较
在对执行 ICE 算法的结果进行测试和分析之前,我们先将这种算法与其他算法做个比较。用来进行比较的算法是“扰动观察”算法(P&O)。P&O 可能是最直观的最大功率点跟踪算法,它被认为是最大功率点跟踪的粗略近似算法。P&O 方法是从曲线上的当前位置(我们称之为原点)稍微移动到原点旁的新位置,然后在新位置上进行电压和电流测量并计算出功率。之后比较计算出的功率电平和原点的功率电平。如果新位置上的功率比原点上的功率高,那么应向 MPP 移动,当前位置现在就变成了原点。如果当前位置的功率低于原点的功率,那么应背向 MPP 移动。随后在原点的另一边重复上述步骤。如果原点的功率高于与其紧邻的两个点的功率,则原点便是 MPP。测试特定的最大功率点跟踪算法时,经常使用 P&O 最大功率点跟踪算法作为比较的标准。关于执行 P&O 算法及其缺陷的更多信息,请参见“Comparative Study of Maximum Power Point Tracking Algorithms(最大功率点跟踪算法的比较研究)”一文。 [1].
ICE 性能结果
我们可以使用两种算法进行性能测试。两个主要的测试标准分别是最大功率点跟踪的速度和精度。使用寻找 MPP 时进行的 I/O 处理次数(测量结果和 CV 变化)计算 MPP 的速度,因为 I/O 时延比执行其他任何操作(比如数学计算)所用的时间都要多。我们使用 Agilent N3300A 直流电子负载作为最大功率点跟踪器,来完成此项性能测试。为了仿真光伏器件输出,我们使用了 Agilent E4360A 模块化太阳能电池阵列仿真器(SAS)。该 SAS 的 I-V 曲线输出是根据光伏板而生成的,光伏板在 1000 W/m^2 的辐照源及常温 25℃的条件下可达到以下技术指标:
MPP = 130.6 W Voc = 25 V Isc = 7.9 A Vmp = 19.2 V Imp = 6.8 A
使用以上 I-V 曲线技术指标,我们可以根据不同的辐照等级和温度值创建出 17 条 I-V 曲线,并将这些曲线存储在 SAS中。我们使用 Agilent VEE 编程语言创建执行每种算法的程序。因此在运行算法之前,我们已经确定了程序发送和接收电子负载测量结果所需的平均时延,以及调节电子负载 CV 设置所需的时间。为了保证良好的电压和电流测试精度,测量应间隔 16.67 毫秒,以消除交流线路中的功率噪声。执行测量所需的平均时间是 43 毫秒。进行恒压调节的平均时间为 3.4 毫秒。在每次负载变化以后,我们增加 10 毫秒的设置时间,所以一个完整的 CV 变化平均耗时 13.4 毫秒。为了提高速度, IC 算法使用了两种电压步长:100 mV 和 800 mV。步长取决于 ∆P 或 ∆I 的幅度。P&O 算法使用了 100 mV 的电压步长。我们使用上述两种算法进行测试,并测量找到 17 条I-V 曲线的最大功率点所用的时间和最大功率点的精度。请在图 3 中查看测试结果。
图 3. 最大功率点跟踪测试结果
平均最大功率点跟踪时间 | 平均最大功率点误差 | ||||
扰动观察法 | 607.3 msec | 0.09 W | |||
改进的电导增量法 | 437.5 msec | 0.08 W | |||
| |||||
ICE 算法具有良好的最大功率点跟踪精度,平均误差只有 80 mW。当然,您能够通过缩短电压步长(这会降低跟踪速度)来控制精度。ICE 比 P&O 的速度快了39%。在本测试实例中,我们使用了两种电压步长,但可以通过增加程序中电压步长大小来加快算法的执行速度,从而根据变化的幅度进行选择。增加电压步长的开销很小,而且在程序中增加几个“if/else”命令即可。
总结
目前针对逆变器实施和执行各种最大功率点跟踪算法,有很多信息资源可供参考。但是光伏测试系统的 I/O 速度和用途不同于逆变器。鉴于以上差异,本文介绍了一种非常适用于通过电子负载执行最大功率点跟踪的最大功率点跟踪算法。ICE 算法执行简单,并提供良好的最大功率点跟踪速度和精度,其最大优点是可以通过调整电压步长和创建多种电压步进(可根据不同曲线间的变化幅度进行选择)来调谐最大功率点跟踪精度和速度,从而满足您的需求。有关各种最大功率点跟踪算法的更多信息,请参阅论文 [1] 和 [3]。
参考文献:
Trishan Esram and Patrick L. Chapman, “Comparison of Photovoltaic Array Maximum Power Point Tracking Techniques” http://www.simosolar.com/uploadfile/learn/uploadfile/200904/20090417030623524.pdf K. H. Hussein, I. Muta, T. Hoshino, M. Osakada, “Maximum Photovoltaic Power Tracking: an Algorithm for Rapidly Changing Atmospheric Conditions” http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=342237&tag=1 D. P. Hohm and M. E. Ropp, “Comparative Study of Maximum Power Point Tracking Algorithms” http://www3.interscience.wiley.com/journal/100519851/abstract. 2002.
上一篇:卓越的开关电源提供线性性能
下一篇:更少的硬件=更多的功能

