- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
射频识别技术的车辆主动定位方法
录入:edatop.com 点击:
引言
智能交通在执行控制命令、完成预定任务时首先要解决定位问题。目前已经有多种解决办法,主要包括:
①航位推算法(DR)。它利用表征方向和速度的矢量,根据车辆在某一时刻的位置推算出另一时刻位置的导航方法。该方法有累积误差,在估计车辆方向角时误差会逐渐趋向无穷大。
②全球定位系统(GPS)。它容易因建筑物、树木等阻挡,使得在不少街道、高架桥、立交桥等处的信号强度不够甚至丢失,而导致定位误差较大甚至错误定位,并且因其成本等原因限制了其在车辆定位中的应用。
③地图匹配它是一种基于软件技术的定位误差修正方法,其基本思想是将车辆定位信息与数字地图中的道路网信息联系起来,车辆在行驶过程中不断比较,由此确定车辆在地图中的位置。此方法要求建立高精度的数字地面模型。
本文提出了一种基于RFID技术的车辆定位方法。与其他传统定位方法比较,用RFID技术定位的主要优势有:
①可以准确定位到车道,而传统的各种定位方法都还无法实现具体车道的定位。
②传统的定位方法在高架桥和桥梁上会存在定位层出错的问题,例如行驶在桥上的车辆被定位到河里,高架桥第二层错定位为第一层,RFID定位技术解决了这一问题。
1 车载RFID主动定位方法
1.1 RFID工作原理
RFID(Radio Frequency IdentifICation,射频识别)是一种非接触式的自动识别技术,可识别高速运动物体,并可同时识别多个电子标签。按工作频率的不同分为低频(LF)、高频(HF)、超高频(UHF)、微波(MW)。RFID是一种简单的无线系统,该系统由阅读器和标签组成。
阅读器是对RFID标签进行读/写操作的设备,主要包括射频模块和数字信号处理单元曲部分。阅读器是RFID系统中最重要的基础设施,一方面,RFID标签返回的微弱电磁信号通过天线进入阅读器的射频模块中转换为数字信号,再经过阅读器的数字信号处理单元对其进行必要的加工整形,最后从中解调出返回的信息,完成对RFID标签的识别或读/写操作;另一方面,上层中间件及应用软件与阅读器进行交互,实现操作指令的执行和数据汇总上传。电子标签中存储着需要被识别的位置信息,被安装在路面,其存储的信息可以被阅读器通过非接触方式读/写。
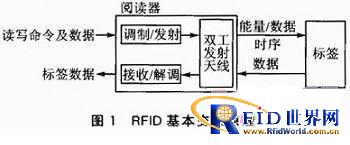
RFID的基本交互原理如图1所示。工作流程如下:
①阅读器通过发射天线发送一定频率的射频信号,当标签进入发射天线工作区域时会产生感应电流,从而获得能量被激活;
②标签将自身编码等信息通过其内置发射天线发送出去;
③系统接收天线接收到从标签发送来的载波信号,经天线调节器传送到阅渎器,阅读器对接收到的信号进行解调解码然后送到后台主系统进行相关处理;
④主系统进行逻辑运算判断该卡的合法性,然后针对不同的设定做出相应的处理和控制,发出指令信号,控制执行机构执行相应动作。
标签与阅读器之间的耦合方式采用远距离系统,即利用辐射远场区的电磁耦合(电磁波的发射与反射)构成射频通道。这种耦合方式的作用区域范同为1~10 m,适用于高速移动物体远距离识别,此系统也是目前发展最快的RFID系统。
1.2 阅读器及标签的部署方法
国内最宽的公路为2011年投入运营的深圳水官双向10车道高速公路。本论文将针对双向4、6、8、10车道的情况进行讨论,介绍车载RFID主动定位的定位方法。
与电子不停车收费系统中阅读器和标签的安装不同,在车载RFID主动定位方法中,阅读器安装在车辆上,标签安装在路边和公路的中央隔离带。阅读器配有3组天线,1组全向天线,2组定向天线,通过3组天线读取标签中的信息。全向天线的阅读距离设置保证了在不同车道数目的高速公路间转换时都可以读到两侧的标签。标签中或者数据库中含有标签的位置坐标信息和此段高速公路的车道数目N,当阅读器读取到标签的信息后,会根据车道数目和读到标签的各种情况判断车辆位于第几车道。
1.3 定位车道方法
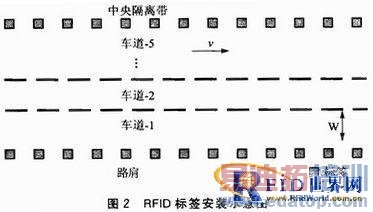
以双向道路的一侧为例,RFID标签安装示意图如图2所示。车辆自左向右行驶,标签以一定间距安装于路肩和中央隔离带。从靠近路肩的一侧定义车道依次为1~5车道。设车道宽度为W,令lO为全向天线的阅读距离,lD1为车辆右侧定向天线的阅读距离,lD2为车辆左侧定向天线的阅读距离。其中lD1=lD2=W,lO=2W。
根据道路的总车道数目N的不同,定位车道的判定方法分别为:
N=4:当右侧定向天线和全向天线读到标签信息后,判定车辆位于1车道(lane=1);当左侧定向天线和全向天线读到标签信息后.判定车辆位于2车道(lane=2)。
N=6:当右侧定向天线和全向天线读到标签信息,判定lane=1;当左侧定向天线和全向天线读到标签信息,判定lane=3;当只有全向天线读到标签信息,判定lane=2。
N=8:如果阅读器有侧天线和全向天线读到标签信息,判断lane=1;如果阅读器左侧天线和全向天线读到标签信息,判定lane=4;如果只有全向天线读到路边一侧的标签信息,判定lane=2;如果只有全向天线读到中央隔离带一侧的标签信息,判定lane=3。
N=10:车辆进入高速公路,此时lO为2W,在1、2、4、5车道时,可以读到标签信息,确定是双向10车道,立即将lO调整为3W。当车辆位于3车道时,无法读到任何标签信息,等待一定时间,如果仍然读不到任何标签,控制单元立即将lO调整为3W。此时的判断方法是:如果阅读器右侧天线和全向天线都读到路边一侧的标签信息,判定lane=1;如果阅读器左侧天线和全向天线读到中央隔离带一侧的标签信息,判定lane=5;如果只有全向天线读到路边一侧的标签信息,判定lane=2;如果只有全向天线读到中央隔离带一侧的标签信息,判定lane=4;如果全向天线读到路两侧的标签,判定lane=3。当某一时刻天线读到标签的信息N≠10,将lO重新调整为2W。
1.4 车辆位置的确定方法
定位到车道之后,可以根据下述方法计算出车辆的位置坐标。全向天线读到右侧标签、读到左侧标签如图3和图4所示。
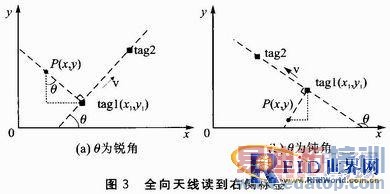
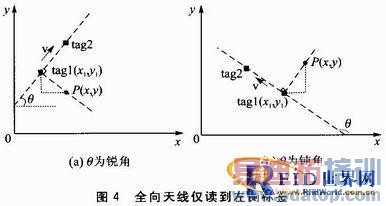
P为车辆的位置,v代表车辆的运动方向,两个标签所在的直线与X轴的夹角记为θ,(x1,y1)为tag1的坐标。

当车载阅读器全向天线能够读到路肩的标签时的位置计算方法为公式(1)、(2);当车载阅读器全向天线只能读到中央隔离带一侧的标签时的位置计算方法为公式(3)、(4)。

2 定位误差分析
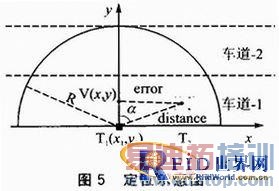
以双向4车道道路的第一车道为例。图5表示车辆位于第一车道时与标签T1的位置关系,R为阅读器全向天线的阅读半径,V(x,y)为车辆定位坐标,distance为车辆与标签的距离,α为车辆相对于标签的位置角度,error为定位误差。
按车道宽度为3.5 m分析汁算,车辆在双向4、6、8和10车道道路中各个车道的定位误差情况如图6、图7所示。
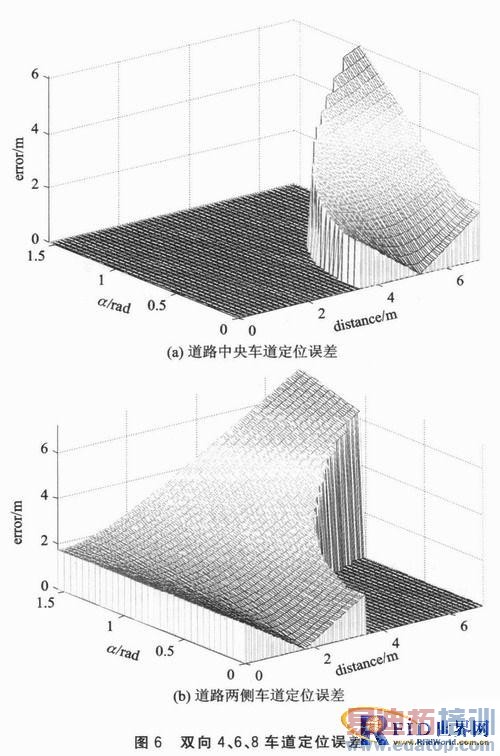
车载RFID主动定位方法中车辆在道路的不同位置的定位误差情况如图6、图7所示。图6(a)为双向6车道道路的第2车道和双向8车道道路的第2、3车道的定位误差,(b)为双向4、6、8、车道道路的其余车道的定位误差。图7为双向10车道道路各车道的定位误差,第1车道和第5车道及第2车道和第4车道的定位误差相同。
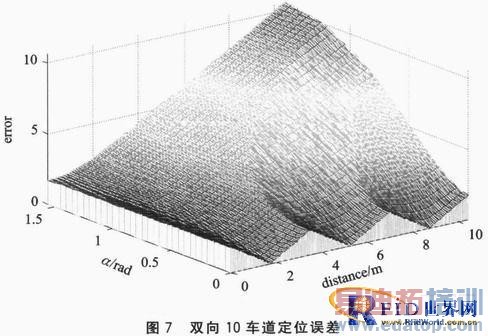
由图6、图7分析得到,对于所有车道,越靠近路肩和中央隔离带的车道上的车辆平均定位误差越大,在同一车道上,越靠近车道中央行驶的车辆定位误差越小。
结语
根据实际渊查统计的数据发现,车辆在一条道路上不同车道的分布和车辆在同一车道上的位置分布服从高斯分布。因此本论文提出的基于RFID车辆主动定位方法对实际行驶过程中的车辆具有较高的定位精度,并可以将车辆定位到具体车道,车辆的具体车道位置信息对智能交通中车辆防碰撞的研究具有重要意义。RFID可以与其他定位技术结合,组成新的组合定位导航系统。车载RFID的年辆主动定何摆脱了传统定化对GPS定位系统的依赖,不会因为信号丢失导致无法定位或定位不准确。鉴于RFID具有信息处理精确度高、速度快,使用不受环境因素影响,成本低,可以重复利用多次读写等诸多优点,RFID技术将在智能交通领域得到广泛应用。

