- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于i.mx27机器人视频监控系统设计
录入:edatop.com 点击:
机器人是机电一体化最高端的产物,也是多种高科技集成在一起的一种产品,用途非常的广泛。如今机器人发展的特点可概括为:横向上,应用面越来越宽,由95%的工业应用扩展到更多领域的非工业应用,像做手术、采摘水果、剪枝、巷道掘进、侦查、排雷等等;纵向上,机器人的种类越来越多,像进入人体的微型机器人,已成为一个新方向,可以小到像一个米粒般大小。
在一些行业应用当中,比如勘探,灾难救援,外星探测,核工业控制,手术机器人等等,在这些需要记录和传输视频的场合中,就必须给机器人搭载一个视频监控系统。视频监控系统是由实时控制系统、监视系统和管理信息系统组成。实时控制系统完成实时数据采集处理、存储、上传功能;监视系统完成对各个监控点的全天候的监视,能同时监测观看多个监测点传来的图像;管理信息系统完成各类所需信息的存储、处理和查询。
基于飞思卡尔I.MX27开发的机器人视频监控系统正式基于市场对机器人视频监控系统的迫切需求推出的一款智能化高科技产品。它是由服务器和终端设备共同构成一个视频监视系统,终端负责采集图像,并将图像通过网线接入以太网或者通过3G传输到服务器端,服务器端完成图像显示、存储和处理功能。在服务器端可以集成一些算法,比如人像识别,指纹识别,医学影像分析等等,将采集到的图像利用不同的智能识别算法可以实现对不同场合环境下智能监测的需求。
系统构成框图示意如下:
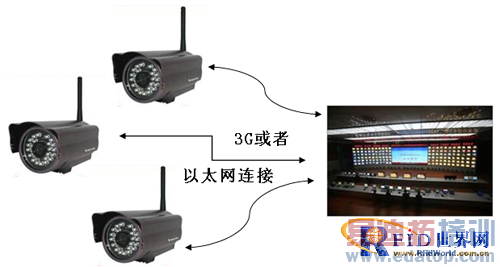
摄像头安装在需要监测的地方,接入以太网或者通过3G将图像传输给监控中心。
视频监控系统主要功能:
1. 视频图像采集
通过摄像头采集视频图像,并将视频图像进行压缩编码。若采用高清摄像头,则图像可以达到D1(720*576)分辨率,视频压缩编码可以有很多种格式,如MPEG2、MPEG4、H.264等等,常用的是H.264格式,因为压缩率高,可减小文件大小,增加传输速率。我们采用的I.MX27平台是一个带硬件H.264编解码的CPU,采用H.264编解码不占用CPU资源,大大提高了CPU工作效率,很好的降低了系统功耗。
2. 视频图像本地存储和上传
摄像头采集到的图像可以选择本地存储和上传,也可以选择直接上传,选择哪种方式是根据用户需要和系统的配置决定的。本地存储的介质可以是SD卡,也可以是SATA硬盘,两种介质系统都可以支持。
上传可以是有线网络,通过RJ45连接网线,支持10/100M以太网。也可以是无线网络,一般是3G,选择3G作为传输媒介时,带宽收到一定制约。我们系统可以做到的传输速度是D1@30fps,这个速度在选择3G网络传输时,会受到网络带宽的约制。
3. 视频图像处理和识别
我们是机器人视频监控系统,所谓机器人,就是用机器去代替人完成一些任务,以降低人力的投入,提高生产效率,降低生产成本。
那么机器要如何才能代替人呢,也就是说视频图像传到监控中心以后,监控中心可以如何利用这些图像自动完成一些工作呢?如果将这些图像利用一定的模式识别算法,让电脑运行一定的算法后,能够利用图像上的特征,自动地作出一些判断,然后自动完成一些控制动作,那么就大大降低了人力的投入。
比如牌照的自动识别,在交通行业中是非常重要,也是目前在广泛应用的;又如人脸自动捕捉,在银行等重要场所,自动捕捉人脸,对安全来说也是非常有意义的;还比如指纹识别,目前在考勤和门禁系统中普遍采用,就是建立指纹库利用指纹的唯一性作为人的一个识别代号。等等这些,在我们日常工作和生活中,已经越来越普及,科技在不断进步,将来会有更多的领域引进和采用这些先进的技术。
以上我们简单介绍了一下视频监控系统的工作方式和功能,我们所采用的控制器I.MX27 CPU是一颗ARM926 400M主频的高性能CPU。基于这颗高性能CPU所搭建的系统平台,具有众多优点:本地存储的可扩展性可以作为硬盘录像机,当网络出现故障时可以将监控画面进行本地保存,从而确保监控的可靠性;高速而强大的CPU可以运行主流的实时嵌入式操作系统;高速且低功耗的CPU适合不同环境的要求,低功耗可以很好的节约资源,在某些不需要实时监控的场所,就可以启用低功耗模式;高清晰且连续的视频码流,适合于绝大多数算法应用的需求,便于实现机器人的功能。
基于i.mx27机器人视频监控系统也许是众多机器人视频监控系统中的一颗小星星而已,但我们相信,在数字化、网络化发展的大环境下,这颗小星星一定能发光发热,尽情发挥它的卓越功能。
13.56MHz NFC天线,13.56MHz RFID天线设计培训课程套装,让天线设计不再难
上一篇:RFID物流管理技术应用设计
下一篇:基于ARM平台的RFID 中间件系统设计

