- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
应用RFID技术实现医用植入装置的通信
录入:edatop.com 点击:
随着科学技术的进步,医用植入装置已经得到广泛的临床应用,它们被用于维持生命(如心脏起搏器)、提高生活质量(如人工耳蜗[1])、治疗疾病(如植入式给药装置)和监测生理指标(如植入式无线颅内压测量仪[2]、无线血糖传感器[3])等目的。
医用植入装置有多种类型,其中一类由植入体和体外部分组成,如图1(a)所示。植入体通过外科手术植入人体内部,与体外部分完全独立,没有“实体”性质的连接,二者的联系“纽带”是无形的电磁波。系统运行时体外部分发送电磁波,植入体从该电磁波获得能量;同时二者之间也通过该电磁波进行信息通信。前面提到的人工耳蜗、植入式无线颅内压测量仪、无线血糖传感器等都是其代表。如果从“供电”和“通信”的角度看,它们也是技术上最为复杂的一个类型。本文讨论的“医用植入装置”特指此种类型在此类医用植入装置中,射频系统的设计既关系到能量传输的效率,也影响通信的性能。
射频识别是一种新兴的自动识别技术,它最典型的应用就是无线IC卡。无线IC卡系统由一个读卡器(PCD)和IC卡(PICC)构成,如图1(b)所示,它们利用射频方式进行非接触双向通信。
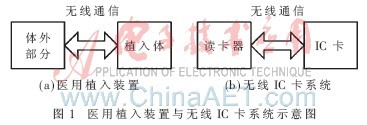
对比本文关注的“医用植入装置”和“无线IC卡系统”可知,二者具有很大的相似性:PICC相当于“植入体”,而PCD则相当于“体外部分”。由此,有可能利用RFID技术实现医用植入装置的通信。这样做具有显而易见的好处:以往的医用植入装置的设计往往采用专用集成电路,因而具有较高的成本和较长的研发周期。而RFID技术成熟、应用广泛、器件丰富,若能够将RFID技术应用于医用植入装置,医用植入装置中的通信环节即可以“商用现货”的形式实现,进而大大降低成本和研发周期。
本文的核心就是基于对医用植入装置特殊技术要求和无线IC卡系统现有技术特点的分析,提出对RFID技术进行裁剪和扩展方案,成功地实现了RFID技术在医用植入装置上的应用。
1 技术分析
不同的医用植入装置对射频通信系统的要求也各不相同,这主要体现在传输能量的大小、通信方向、是否双工通信及通信速率上。下面以人工耳蜗作为应用实例,提出对射频通信系统的具体要求。
一个完整的人工耳蜗系统包括植入体(包含刺激器与电极)和体外语音处理器,它们之间射频通信的技术要求是:体外语音处理器需通过电磁波连续不断地向植入体提供工作能量;体外语音处理器与植入体之间需要具有非双工的双向数据通信能力;为了具有较高的“刺激速率”,下行通信(体外语音处理器到植入体)速率应达到数百kb/s以上;上行通信(植入体到体外语音处理器)主要用于系统测试和参数调整,故通信速率达到几十kb/s便可以满足要求;考虑到实用性,整个系统必须是微小型化设计和超低功耗设计,电路应尽量简洁和便于实现。
目前的RFID主要应用在3个频段上:低频(典型为125 kHz)、高频(13.56 MHz)和超高频(860 MHz以上)。其中低频段不能满足数据通信速率的要求;而在超高频段人体对电磁波的吸收比高频段高1~2个数量级。因此综合技术需求、能量效率和人体健康等各方面因素,确定采用13.56 MHz的工作频率。而且目前该频率的RFID技术成熟、应用广泛,这对系统的设计和实现最为有利。
13.56 MHz的RFID主要有2个被广泛采纳的标准:ISO 14443和ISO 15693[4],其中ISO 14443又定义了TYPE A和TYPE B 2种类型。在这2种标准协议中,下行通信都采用了最简单的直接ASK调制方式,区别主要是数据编码和调制度的不同;系统的通信速率相对“较低”,最高只有106 kb/s,相对设计目标有比较大的差距;在上行通信中采用编码数据调制副载波,然后再用已调副载波对13.56 MHz的载波进行负载调制,不同协议的区别在于数据编码和副载波调制方式。
通过以上分析可知,RFID现有标准协议不能完全满足设计目标要求。一方面需要提高下行通信速率,另一方面为了使植入体部分的电路尽量简单,期望不用副载波而是由数据直接对13.56 MHz的载波进行负载调制。因此需对RFID的“标准技术”进行裁剪和扩展,设计一种技术方案并寻求合适的器件,实现上述设计目标。
2 设计与实现
系统整体框图如图2所示,全系统由体外语音处理器和植入体组成。
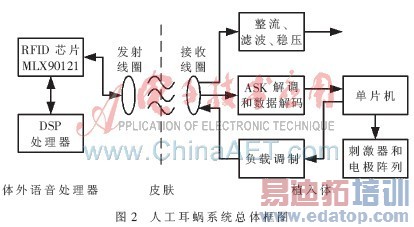
由于人工耳蜗的体外语音处理器需要承担计算量较大的语音信号处理任务,故选用了低功耗的DSP芯片TMS320VC5502作为核心处理和控制,但其射频分系统的核心则是RFID芯片MLX90121,它负责产生射频载波,为植入体提供能量;在下行通信时接收来自DSP的数据,对载波进行ASK调制;在上行通信时接收由植入体负载调制的载波,并进行解调将结果输出到DSP。
植入体内包括用于从射频载波获取电源的高频整流、滤波和稳压电路,用于恢复数据的ASK解调和数据解码电路,用于上行通信的LSK电路,为耳蜗听神经提供电流刺激的控制电路和电极。植入体的控制核心是一片微功耗单片机。
2.1 MLX90121的硬件连接和初始化设置
MLX90121是完全支持ISO 14443和ISO 15693协议的RFID收发集成电路芯片,它还允许用户以“直接模式”进行发送和接收,支持若干非RFID标准的工作模式,因而为扩展应用提供了可能。成功的应用取决于针对MLX90121正确的硬件和软件设计。
在本系统中,MLX90121关键外围电路如图3所示。MLX90121外接13.56 MHz晶振产生射频载波。射频信号经过功率放大后由TX引脚输出,再经过阻抗匹配网络传输到天线线圈;接收信号则经过适当的衰减后由RX引脚输入;芯片内的模拟电路部分实现通信中的调制和解调;其中MOD引脚的电阻将影响ASK调制深度,为了最大限度保持为植入体提供稳定的能量,在保证可靠数据通信的前提下,尽量减小调制度。经过实际测试,系统在10%的调制度下即可正常工作。
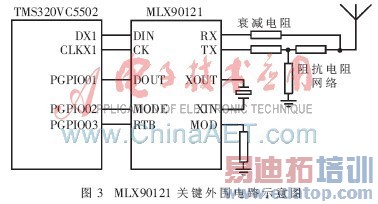
MLX90121具备可以直接与DSP接口的数字端口,在DSP的控制下运行。在系统中它与DSP的数字接口线共有5 个。其中MODE和RTB决定MLX90121的当前模式:
MODE/RTB=0/0 配置模式
MODE/RTB=0/1 保留
MODE/RTB=1/0 发射模式
MODE/RTB=1/1 接收模式
CK提供向MLX90121写入数据的时钟,DIN和DOUT则分别为数据的输入和输出。
使用MLX90121的第一步是初始化,这一过程在配置模式下通过写入MLX90121的内部寄存器完成。关键寄存器有3个:
模拟配置寄存器 AnalogConfig 地址0 H
电源状态寄存器 PowerState 地址1 H
数字配置寄存器 DigitalConfig 地址3 H
具体步骤是:首先通过设置MODE/RTB=0/0进入配置模式,而后通过DIN在CK的配合下写入数据,每个数据帧为12 bit,包括4 bit的寄存器地址和8 bit的配置数据[5]。
在本系统的设计中将要使用MLX90121的直接发射和接收模式,而且已经确定了下行通信采用非100%的ASK调制,上行通信采用无副载波的LSK调制,于是对MLX90121的初始化配置如下[5]:
模拟配置寄存器 AnalogConfig=83 H
电源状态寄存器 PowerState=01 H
数字配置寄存器 DigitalConfig=00 H
正确初始化以后,MLX90121即会有13.56 MHz的等幅载波输出。此后如果进入发射模式,通过DIN写入数据即可实现下行通信;若进入接收模式,则接收并经过解调的信号由DOUT输出。
2.2 下行通信
下行通信时,首先通过设置MODE/RTB=1/0使得MLX90121进入发射模式,这时只要保持CK=0,MLX90121便处于直接发送模式,输出的射频信号直接由DIN引脚输入的数据实施ASK调制。调制度由模拟配置寄存器和引脚MOD所连接的电阻共同决定。通信的数据率则完全取决于DSP向DIN写入数据的速度,其上限仅受MLX90121时序和接收端解调电路性能的限制,与RFID的技术标准无关。通过这种方式,大大提高了下行通信的数据率。本系统设计通信速率为678 kb/s,测试结果表明该速率仍有进一步提高的空间。
系统下行通信采用曼彻斯特码,这是因为曼彻斯特码具有0和1码元数量相等的特性,调制后的载波具有稳定的能量;另一方面曼彻斯特码的解码电路非常简单,容易实现。图4是完整的下行通信过程中各阶段的波形示意图。系统对单稳态电路的要求是可以双向触发但不可重复触发,其暂态时间τ满足:T/2≤τ≤T,其中T为一个数据位的宽度。
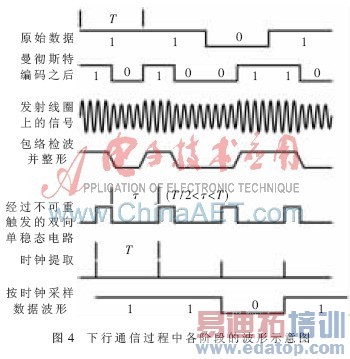
植入体在接收下行通信数据时,首先需要提取射频信号的包络并整形,整形之后的信号再经过单稳态解码电路恢复原始数据。连续不断的下行数据传送至单片机,单片机根据数据协议解释后执行,控制相关电路完成对耳蜗听觉神经的电流刺激。
2.3 上行通信
上行通信时,首先通过设置MODE/RTB=1/1使得MLX90121进入接收模式,并保持CK=0和DIN=1不变,则在给定的初始化设置下MLX90121处于一种特殊的直接接收模式[6]。此时,MLX90121的TX引脚输出等幅载波,植入体以LSK方式对该载波进行调制,已调载波由MLX90121的RX引脚接收,其内部的模拟前端电路实现对载波信号幅度变化的边缘检测,并在每次载波幅度跳变时在DOUT引脚输出一个窄脉冲,如图5所示。
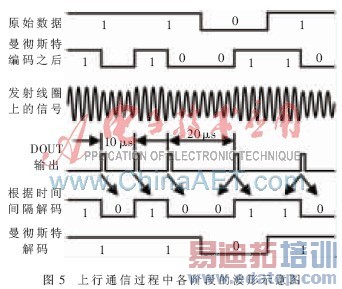
经过分析发现,MLX90121引脚DOUT的输出脉冲指示了经LSK调制后载波幅度变化边沿的位置,但没有直接解调出调制信号的包络。为了能从解调输出的脉冲流序列中恢复出数据,需要采用某种编码机制。对该编码机制的要求是:无论数据为0还是1,在编码后必须在码内有“跳变”存在,且根据跳变出现的位置间的关系可以确定是0还是1。显然曼彻斯特码可以满足上述要求。它在每个码内都存在一个跳变,只要确定了前一个码元的内容,即可依次根据跳变边缘的时间信息对后续码元做出判决。因此在系统的上行通信中也采用了曼彻斯特编码。
MLX90121是面向RFID标准协议设计的芯片,在扩展应用中会有带宽或码率的限制,从而决定了上行通信的速率。按照给定的初始配置参数,经实际试验发现可以实现稳定“解调”的平均数据率为100 kb/s,能保持稳定的范围约为70~120 kb/s。当数据率变化时,DOUT引脚输出脉冲的宽度也会随之改变,但若超出上述范围,输出脉冲将会重叠或分裂,从而使得输出脉冲的信息发生模糊,无法从中恢复原始数据。为此,本系统设计上行通信的调制速率为100 kb/s。由于采用曼彻斯特编码的缘故,实际有效信息的数据率为50 kb/s。按照上述设计,DOUT引脚输出脉冲之间的间隔只可能出现10 μs和20 μs两种情况。DSP根据这一特征,并结合适当的同步头和数据协议设计,即可通过软件算法解码出原始数据。
植入体的单片机通过ADC获得数据(人工耳蜗所需的监测、测量数据),根据数据协议增加同步头等数据位,再进行曼彻斯特编码形成发送数据帧,最后进行LSK调制。单片机只需通过一个I/O引脚控制的MOS管开关的通断以改变接收线圈回路的负载即可实现LSK调制。
本文以RFID芯片MLX90121为核心设计,实现了人工耳蜗体外语音处理器与植入体之间的半双工高速通信。系统的无线能量传输稳定可靠,下行通信速率为678 kb/s,上行通信速率为100 kb/s。本系统的实现证明了基于商用RFID技术及其器件实现医用植入装置的双向通信是可行的。相对使用ASIC技术的产品,极大地节约了研发成本、缩短了研发周期并且具有很强的可移植性。
13.56MHz NFC天线,13.56MHz RFID天线设计培训课程套装,让天线设计不再难
上一篇:基于RFID的水控管理系统
下一篇:物联网综合论述及终端技术

