- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于CAN总线和RFID技术的矿井定位系统设计
录入:edatop.com 点击:
引 言
近年来,矿井安全事故频发。在分析近期几个煤矿特大事故时发现几个共性问题:地面与井下人员的信息沟通不及时;煤矿事故发生后,抢险救灾安全救护的效率低,搜救效果差 。为了在矿难发生后能够迅速确认矿难位置和被困员工人数,以最快的速度开展营救工作,保障矿工的生命安全,在矿井中布置基于高新技术的安全监控管理系统势在必行。
本文设计了1个基于CAN总线网络和射频识别技术的矿井定位系统,该系统可以实时地将矿井
下人员及矿车的当前位置通过CAN总线网络传送到位于地面的上位机,不仅可以掌握井下作业情况,而且一旦发生安全事故,可以立刻确定被困人员所处的位置及人数,以便迅速展开救援工作。
1 、RFID技术和CAN总线简介
射频识别(RFID,Radio Frequency Identification)技术是利用无线电波进行通信的一种非接触式自动识别技术。射频识别系统由读写器和电子标签(Tag)组成 ,每个Tag具有1个全球唯一的ID号,可以与读写器进行无接触的信息交换。根据射频识别系统的工作频率,可分为低频(100—500 kHz)、中频(10—15 MHz)、射频(850—950 MHz)和微波(2.45—5.8 GHz)系统,不同的工作频段影响系统的读写距离。按Tag的供电方式,可分为有源和无源两类。
有源Tag需要电源供电,读写距离远,但使用不方便,价格高,寿命有限;无源Tag使用读卡器天线发射的电磁波的能量,因此无源Tag的读写距离有限,但寿命长、体积小。基于在矿井下使用的特殊环境,将Tag嵌人到矿工的安全帽或皮带中,因此本系统使用无源Tag,增加其使用寿命。低频和中频系统对Tag的读写距离只有10 cm左右,射频系统的读写距离可达7 m 左右,微波系统(主要使用有源Tag)可达几十米。由于矿井下需要相对精确的定位信息,而且还要读写方便,本系统选择工作在射频波段,需要在矿井中每隔15m左右安装1个读写器。
CAN(Controller Area Network)总线最早由德国BOSCH公司提出,主要用于汽车内部测量与控制中心之间的数据通信。由于其良好的性能,广泛应用于其他领域当中,并逐渐成为主要通讯手段。其主要特点有:国际标准的工业级现场总线,传输可靠,实时性高 ;传输距离远(无中继最远10 km),传输速率快(最高1 bit/s);单条总线最多可接1 10个节点,并可方便的扩充节点数;报文为短帧结构并有硬件CRC校验,受干扰概率小,数据出错率极低;出错的CAN节点会自动关闭并切断和总线的联系,不影响总线的通讯;非破坏性总线仲裁技术,可多节点同时向总线发数据,总线利用率高;总线上各节点的地位平等,不分主从,突发数据可实时传输;具有硬件地址滤波功能,可简化软件的协议编制;CAN—bus 总线系统结构简单,性价比极高。当矿井通讯网络需求达到更远的通讯距离(大于10 km),或者终端数目较多(大于110个)时,安装CANbridge网桥可以成倍地延长通讯距离,也可以成倍地增加CAN—bus网络中终端设备的数目。而且在矿井中使用CAN总线网络还有利于将矿井中相互独立的各种类型系统互通,进行统一管理。
2、 矿井定位系统硬件设计
矿井定位系统结构如图1所示。本系统中监控器位于地面的监控室,通过CAN转换卡与CAN总线相连,其上运行由Visual C++编写的监控软件,可以动态显示矿工当前位于哪一基站附近,还可以向某些基站发出查询命令,查询某一员工当前位置;射频读写器作为基站安装在矿井中的已知位置,通过CAN总线与其他基站和监控器相连;矿工进入矿井时都要佩戴安全帽或腰带(内嵌电子标签),并且电子标签的ID已与监控系统信息相关联。当通信距离长、基站节点数量多时,可以使用CANbridge延长CAN总线网络。
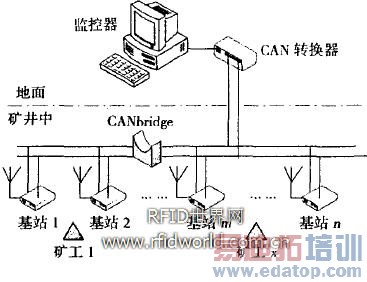
图1 矿井定位系统结构
本系统使用的无源电子标签是TI公司的RI—UHF—STRAP一08,其符合EPCglobal TM Gen2(v. 1.0.9)和ISO/IEC 18000—6c协议标准,内置192bit的存储器(96bit的EPC存储器、32bit的操作密码、32bit的KILL密码、32bit的Tag—ID存储器),工作在860~960MHz的频段,但此频段还未推出专用的读写器模块,因此本系统的重点是射频读写器的研制。读写器的结构如图2所示。
考虑到矿井中的设备需要防爆安全认证,本系统设计中尽可能地减少外围芯片数量。MCU采用美国微芯公司的PIC1 8F4580单片机,此单片机集成了基于ECAN技术的CAN总线控制模块、lO位A/D模块、增强的通用串口模块、32KB的增强型Flash存储器等,内部资源丰富,简化了系统设计。
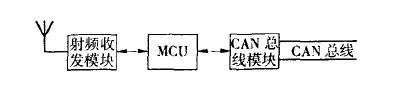
图2 读写器的结构
射频收发模块使用AD公司的可编程射频收发芯片ADF7020,工作频率为431~478 MHz和862~956MHz波段,收发过程工作在半双工方式,支持ASK/FSK/OOK/GFsK等多种调制方式。CAN总线驱动器使用的是致远电子的通用CAN收发器芯片CTM8251A,此芯片将传统的CAN总线驱动电路的光电隔离和CAN驱动器集成到一块芯片,提高了通信的可靠性。
2.1 PICl8F458O与CTM825lA 的接口电路PIC18F4580带有CAN控制模块,支持CAN1.2、CAN2.0A、CAN2.0B协议,只需外接CAN驱动器即可实现CAN模块的硬件设计,接口电路如图3所示。CAN发器芯片CTM8251A具有DC 2 500 V隔离功能,符合ISO 11898标准,数据速率最高达1Mbps,具有自动热关断保护功能,并且未上电或欠压节点不会影响CAN总线的正常工作。
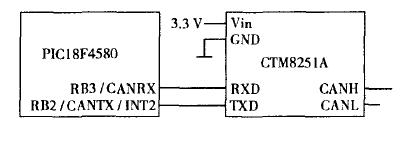
图3 CAN模块接口电路
2.2 PIC18F4580与ADF7020的接口电路
图4为MCU与射频收发模块的接口电路。PIC18F4580单片机通过ADF7020的串行数据输入引脚SDATA向ADF7020发送编程控制字,控制其工作方式,并可以通过串行数据读回引脚SREAD读取ADF7020的工作状态,SLE引脚作为控制字的锁存信号。DATA I/O引脚是发送信号输入和接收信号输出分时复用引脚,收发工作在半双工方式,因此MCU工作在半双工的同步通信模式下,通过串行同步接口接收或发送数据。当ADF7020接收到一个来自天线的有效信号后,通过INT/LOCK引脚向MCU发出中断信号。
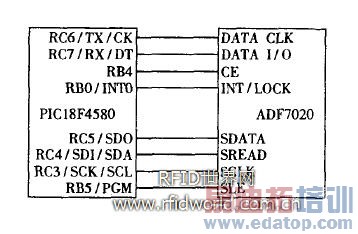
图4 PIC18F4580与ADF7020的接口电路
3 、系统的软件设计
本设计的编程环境是MPLAB IDE软件并内嵌MPLAB—C18,可以支持C语言编程。系统的软件主要分为PIC18F4580初始化、ADF7020初始化、CAN数据收发、读卡器与电子标签间的通信算法等部分。
PIC18F4580初始化主要是对片内各个功能模块的初始化,包括:CAN模块初始化,USART模块初始化,WDT初始化,设置各个端口的方向等。ADF7020初始化主要包括:设置晶振电路的接人方式,信号的调制/解调方式(ISO/IEC 18000—6c标准中使用ASK),定义调制信号的调制输出功率,打开VCO、PLL和输入输出时钟等。在CAN数据收发程序中,读写器的MCU通过CAN总线向上位机实时发送读写器识别出的Tag的相关信息,而CPU接收来自上位机的控制命令数据,其流程图如图5所示。
本系统要求读写器能够识别到其覆盖范围内的所有Tag,但在读写器覆盖范围内的Tag会几乎同时响应读写器的指令,这样响应信号就会发生碰撞,导致通信失败,读写器无法正确识别Tag。因此,读写器软件系统要加人防碰撞算法,保证读写器能够与电子标签正确地交换信息。本系统使用支持ISO/IEC 18000—6c协议的电子标签,规定使用基于概率类型的时隙随机防碰撞算法。此算法的工作过程为:电子标签进入读写器覆盖范围后进人Ready状态;读写器发送Select命令和Query命令信号(开始一个新的Round周期)并监听响应信号;电子标签收到Query命令后将一个16位的随机(或伪随机)数(数值范围为0000H~3FFFH,即共有多达215个时隙可供使用)装载到时隙计数器中,进入Arbitrate状态,当电子标签每接收到一个QueryRep命令,时隙计数器就会进行减法操作(Query命令中规定了每次减的值Q,而且可以使用QueryAdjust命令修改先前的Query命令规定的Q值);
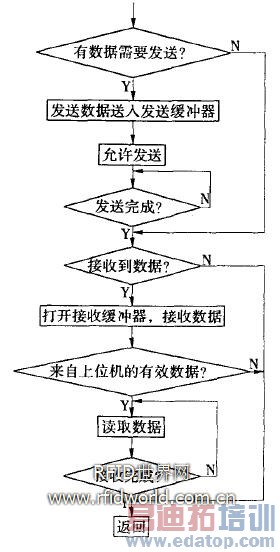
图5 CAN收发程序流程图
当计数器减为0时电子标签就进入Reply状态,此时向读写器发出一个16 bit的(伪)随机数作为应答信号;如果电子标签收到一个有效的ACK信号(正确包含自己向读写器发送的16 bit随机数),那么电子标签就会进入Acknowledged状态,否则如果没有收到正确的ACK,则表明发生碰撞,返回Arbitrate状态;在确认状态中,电子标签向读写器发送包含自己的PC(Protocol Contro1)、EPC(Electronic Product Code)和16bit的CRC校验等字段的信息;此后读写器向电子标签发出Read命令,可以读Tag的EPC和TID 的部分或全部内容;读取后Tag又回到Ready状态。
读卡器与电子标签间的通信算法流程图如图6所示。
由于ISO/IEC 18000—6c协议使用基于概率类型的时隙随机防碰撞算法,与ISO/IEC 18000—6a协议的ALOHA算法 和ISO/IEC 18000—6h协议的自适应二进制数算法相比,由于时隙随机防碰撞算法在Tag中使用时隙计数器进行防碰撞,大大简化了读写器CPU的编程工作,并提高了读写器的工作效率。
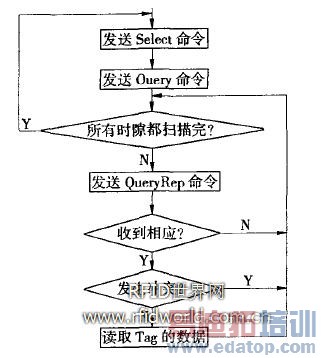
图6 读卡器与电子标签问的通信算法流程图
4、 结语
本文针对煤矿安全生产的需要,设计了基于RFID技术的矿井定位系统。为了提高系统的可靠性,减小防爆安全认证的难度,设计中使用高集成度芯片,以减少分立元件的数量。在读写器中实现了基于最新的ISO/IEC 18000—6c国际标准协议的软件设计,不仅减小了冲突发生的概率,而且大大提高了读写器CPU的效率。读写器与上位机的通信使用了可靠性较高、矿井中广泛使用的CAN总线技术,使地面监控室可以及时了解井下的工作状况。
--------------------------------------------------------
国外煤矿安全信息
评定和保护电路安全火花的现代方法在乌克兰、德国、法国、英国、美国和其他一些国家的主要试验中心不允许采用微型电路作为防火花元件。但是在捷克和俄罗斯允许用微型电路作为ib水平电路的防火花元件。IEC60079—1 1标准不允许采用晶体三极管对ia水平电路作为限流器,因为不能计算瞬变过程。在马克耶夫矿业安全研究院具有试验设备安全火花的经验和每项工作的实践,能完成静态和动态中防火花元件负荷的评定。我们认为,在采用ia和ib水平电路条件中没有太大的差别。在第一种情况下,不允许采用用过的晶体三极管,在第二种情况下,允许采用所有半导体仪器,因为ib水平电路在能产生爆炸危险浓度的混合气体的条件中工作。我们根据国标计算确定出不同欧姆电路能量的安全火花系数。我们采用最小点燃电流(8.3% 的沼气空气混合体),在这种情况下,按放电能量的安全火花系数小于1。文中列出了计算结果:欧姆电路电压 ,最小点燃电流,,不同放电能量的安全火花系数k.m,放电最大长度Z ,放电平均电流,r。在整流最小速度0.046 m/s情况下进行了计算。完善了评定电路安全火花的计算方法能够进行评定微小电流的安全火花性和用于评定更危险的氢——空气混合体。
摘自《 yronb YKPAI4HbI 》 2007

