- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
智能停车场车辆检测系统的设计与实现
录入:edatop.com 点击:
1引言
在现代化的大型停车场中,智能停车管理系统使得车辆进出手续简单,安全性高,实现了对车辆的自动检测、计费、统计、显示等功能,大大节省了人力资源,提高了工作效率。整个停车管理系统中,车辆检测部分是系统的关键。本设计介绍了一种停车场车辆检测系统,通过分布在进出口的车辆检测器,实现对闸杆机的控制和车位提示等功能。
2系统总体介绍
整个停车管理系统示意图如图1所示,信息显示牌为LED显示屏,显示当前时间及车位信息。当有车进入时,司机进行刷卡,刷卡信号由控制器读入,控制闸杆机抬起,语音提示“欢迎光临 ”,当地感线圈检测到车辆进入时,更新车位信息,抓拍车辆图片,闸杆机下落;同样,当车辆驶出,司机刷卡,控制闸杆机抬起,语音提示“谢谢光临,当地感线圈检测到车辆离开,抓拍车辆信息,闸杆机下落并更新车位信息。而车辆的图像信息、IC卡数据信息的处理都将由值班室的上位机完成。
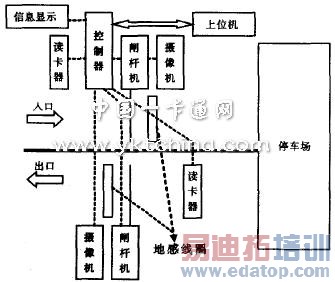
图1停车管理系统示意图
控制器设计框图如图2所示,系统选用SPCE061A型单片机作为主控芯片,单片机通过读卡信号和锁相环电路的电平变化检测车辆的到来。DS1302时钟电路为系统提供精确的时间信息,通过驱动LED显示牌实时显示车位及时间信息,系统具备与上位机的串行通信通信接口。
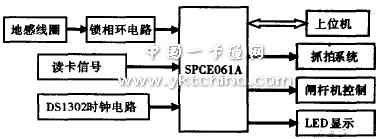
图2智能停车场车辆检测系统总体设计框图
3系统原理介绍
3.1车辆检测部分
准确无误地检测车辆是系统正常工作的前提。通过各种方案比较,本设计的车辆检测器采用地感线圈检测方案。地感线圈车辆检测器是一种基于电磁感应原理的车辆检测器。地感线圈Ll埋在路面下,通有一定工作电流的环形线圈,由多匝导线绕制而成,埋设在道路中。地感线圈构成的耦合电路如图3所示:
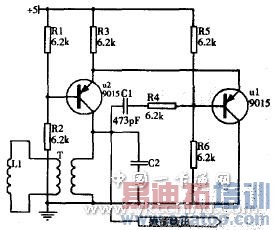
图3 耦合振荡电路
T为隔离变压器,匝数比为1:1,三极管Ul和U2组成共射极振荡器,电阻R3是两只三极管的公共射极电阻,并构成正反馈。地感线圈作为检测器谐振电路中的一个电感元件,与车辆检测器的振荡回路一起形成L C谐振。当有车辆通过时,将会使线圈中单位电流产生的磁通量增加,从而导致线圈电感值发生微小变化,进而改变LC谐振的频率,这个频率的变化就作为有汽车经过地感线圈的输入信号。为了检测这个变化,常用的办法是通过单片机计算单位时间内的振荡脉冲个数来确定车是否到来。在本设计中,需要检测两个地感线圈的频率变化,如果利用单片机同时对两路信号频率的变化量进行测量,则系统相对较大,程序比较复杂,使得单片机负担较重。这里介绍一种新的检测方法:利用锁相环音频译码器LM567检测频率的变化,应用电路图如图4所示:
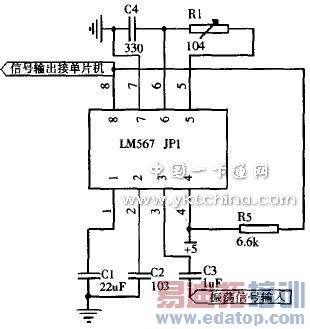
图4锁相环电路
LM567的第5、6脚外接的电阻、电容决定了IC内部压控振荡器的中心频率,fo=1/1.1RC。第1、2脚通常图4锁相环电路是分别对地接电容,形成输出滤波网络和环路低通滤波网络,其中第2脚所接电容决定锁相环电路的捕捉带宽,带宽的理论值可用此公式计算:
当音频译码器LM567工作时,若输入的信号频率落在给定的通频带时,锁相环即将这个信号锁定,同时LM567的内部晶体管受控导通,8脚输出低电平,否则输出高电平。当输入信号频率处于通频带内,LM567锁定,输出低电平。通常在无车情况下,耦合电路的振荡频率会在一定的范围内保持不变,当车经过地感线圈时,使得耦合电路震荡频率发生变化,并且,随着车型的不同以及车本身的铁质不均匀,使这个频率的变化也在一定的范围内浮动。因此,通过实验,选择合适的LM567捕获带宽值,使得当无车时,输入信号频率虽有微小变化,但使这个浮动的频率都处于通频带内,LM567锁定,8脚输出低电平;有车到来时,频率发生剧烈的变化已不在通频带内,8脚就会输出高电平。这时,对车辆是否到来的检测转化为对电平高低的检测,通过触发单片机的外部中断即可感知车辆的到来,而无需通过复杂的程序来区分此时的频率变化是否由车辆的到来所引起,大大降低了编程的难度。
3.2其他控制部分
控制闸杆机的起落即是控制闸杆机的直流电机的正反转,通过单片机控制口输出高低电平配合继电器工作,直流电机电机两端加正反电压可以实现正反转。对于时间的记录,这里选用DS1302日历芯片,DS1302可以对年、月、日、周、时、分、秒进行记录.可接入后备电源,在主电源关闭的情况下也能始终保持连续工作,单片机SPCE061A可以随时读取当前的时间。与上位机的通信利用SPCE061A的通用异步串行通信模块(UART),它提供了一个全双工标准接口,借助于IOB口的特殊功能和UART IRQ中断实现与上位机配置的RS一232串行通信接口COM链接,实现了数据的及时传输。另外,语音提示部分利用SPCE061A的语音处理优势。利用 SPCE061A的语音压缩算法库和内置的DAC等,即可实现清晰的语音播报功能,无需外加语音芯片。
4系统主要软件设计
系统的主程序主要负责系统初始化(包括各IO口的初始化、中断初始化及DS1302的初始化等),及LED显示牌的时间显示,利用SPCE061A的0. 5s时基中断,每0.5s读取一次DS1302的时间信息,并刷新LED显示。而读卡信息和地感线圈有车信息的检测采用外部中断触发形式,在中断服务程序中实现各种自动控制。主要中断服务程序的程序流程如图5、6所示:
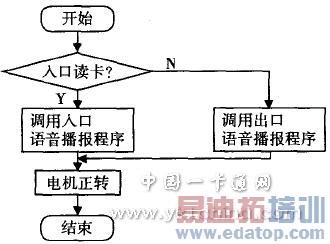
图5读卡中断服务程序流程图
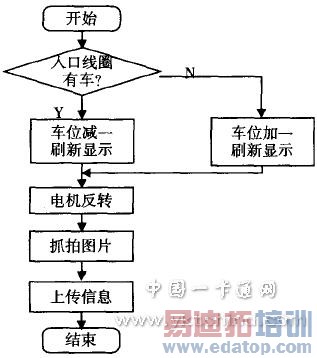
图6地感线圈中断服务程序
5结束语
本设计利用SPCE061A实现了停车场进出车辆的自动检测,闸杆机的自动起落及车位信息的实时显示,配合IC卡信息处理及图像处理系统即可实现智能停车场的自动化管理。地感线圈的应用使得对车辆的检测准确无误,保证了系统的可靠性。
参考文献:
罗非亚凌阳16位单片机应用基础 匕京:北京航空航天大学出版社,2005.
赵海兰.DS1302实时显示时间的原理.电子技术,2004,1:43-46.
冯红梅.环形线圈车辆检测器的设计与实现_青岛科技大学学报2OO5,26 (1):448-451.
作者简介:孙丛君女,生于1984年,西南交通大学电气工程学院硕士研究生,主要研究方向为自动控制及自动化。张喜茂,西南交通大学电气工程学院 段国艳,四川工程职业技术学院
13.56MHz NFC天线,13.56MHz RFID天线设计培训课程套装,让天线设计不再难
上一篇:智能交通系统研究回顾与展望
下一篇:家用门禁防盗监控市场是未开拓的处女地

