- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
MEMS时钟振荡器在射频系统中的应用
录入:edatop.com 点击:
DCXO参数的选择
DCXO在实际运行环境下可用的绝对频率牵引范围(APR)是由振荡器电路的牵引范围,频率稳定性和长期老化特性所决定的。例如,一个±150ppm牵引范围,频率稳定性±10ppm和老化特性 ±5ppm的DCXO将有±135ppm的APR。如果振荡器的频率稳定性等级降到±50ppm, 则可用频率范围APR也减少到±95ppm。在满足系统规格前提下,设计人员可能需要考虑在所需振荡器稳定性和器件成本之间的权衡。
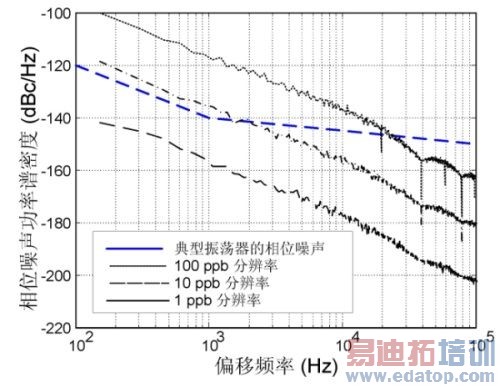
图2:频率分辨率量化引起的相位噪声,DCXO 10 MHz输出,频率更新速率每秒25000次
应用DCXO的数字锁相环路设计需要选择合适的频率分辨率、频率更新速率和更新延迟,以尽量减少频率更新引起的量化相位噪声。通过提高频率更新速率和频率分辨率,量化噪声可以降至振荡器本征相位噪声水平以下。图2是不同频率分辨率调整下的10MHz DCXO相位噪声, 频率更新速率每秒25,000次。图中数据显示,如果DCXO频率调整的分辨率高于10ppb,频率更新引入的量化噪声可降至低于振荡器本征相位噪声的水平,使得频率调整不会影响性能。频率更新速率也是非常重要的设计参数,因为更新速率太低会导致DCXO在相对长的时间累积较大的频率相位误差,从而导致较大的频率调整数值和增加量化相位噪声。但是,对于一个能以1ppb分辨率调整的DCXO,即使是低至每秒2,500次的更新速率,也足以确保量化噪声不影响振荡器的性能(见图3)。
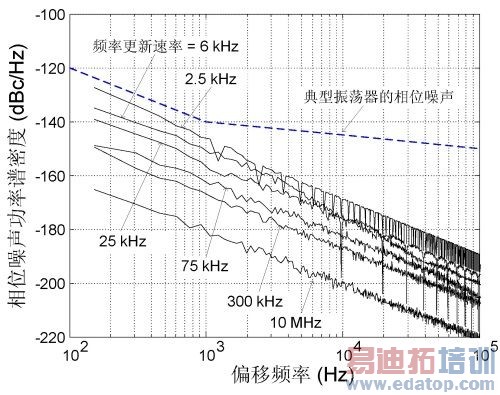
图3:频率更新速率对近载波相位噪声的影响,DCXO频率分辨率1 ppb
第四页:DCXO抖动清除电路实现
