- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于GPS的恒温晶振频率校准系统的设计与实现
录入:edatop.com 点击:
摘要:针对目前广泛对高精度频率源的需求,利用FPGA设计一种恒温晶振频率校准系统。系统以GPS接收机提供的秒脉冲信号为基准源,通过结合高精度恒温晶振短期稳定度高与GPS长期稳定特性好、跟踪保持特性强的优点,设计数字锁相环调控恒温晶振的频率。详细阐述系统的设计原理及方法,测试结果表明,恒温晶振的频率可快速被校准到10 MHz,频率偏差小于0.01Hz,具有良好的长期稳定性,适合在多领域中作为时间频率的标准。
关键词:频率校准;恒温晶振;数字锁相环;FPGA
时钟技术在现代科学技术中有着广泛的应用,许多领域对时间指标的要求越来越高,如电力、通讯、军事、航空航天等,都需要高精度的同步时钟作为参考,协调整个系统的正常运行。GPS是目前世界上应用范围最广、实用性最强的全球精密授时、测距和导航定位系统。高精度频标目前主要有铷钟、铯钟、氢钟等原子钟以及高精度晶体振荡器。其中,高精度晶体振荡器以其使用寿命长、价格较为便宜等优点,获得了广泛应用,但是晶体振荡器会由于温度、老化等因素产生频率的漂移,长期稳定性较差。为了获得一个短期及长期稳定度都比较优良的时间频率标准,本系统以授时型GPS秒信号为参考,通过数字锁相环对高稳晶振的频率进行控制与修正,此方法具有便携、廉价等优势。
1 GPS接收机测试及恒温晶振选型
1.1 GPS接收机测试
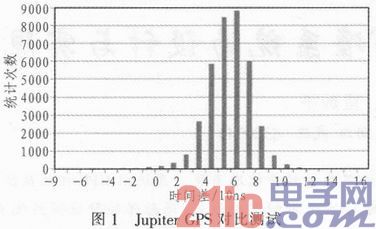
系统选用并行12通道,正常接收卫星时,秒脉冲(1PPS)时间精度优于100 ns,并且输出与秒脉冲完全同步的10 kHz信号的Jupiter授时型GPS接收机。由于天线角度、电离层、对流层、多径效应、接收机自身特性的影响,GPS会产生失锁或者虽然锁定但秒信号抖动较大,此时测得的时差数据有很大的噪声分量。在同一地点,当两台Jupiter授时型GPS接收机都正常接收卫星时,连续10小时以一台GPS的1PPS作为基准,对比另一台GPS的1PPS到达时刻,绘出到达时间差的柱状统计图,从图1中可得出,两台GPS接收机正常运行时,两个1PIPS信号的时间差99%以上集中在0~100 ns之间,时间差的均值是54 ns,主要是由GPS天线引起;计算出均方差为7.64 ns,可以看出两台Jupiter GPS接收机的1PPS信号一致性很高,抖动较小。但是对于随机误差引起的1PPS跳变或者GPS接收机偶然锁星失败,虽然也输出1PPS信号,但其精度较低不能作为基准源。
1.2 恒温晶振选型
GPS接收机输出的1PPS信号存在较大的随机误差,但是没有累计误差,而恒温晶振时钟信号的随机误差较小,不过由于自身老化和外界温度等一些因素的影响,存在频率漂移现象,具有较大的累计误差。如果恒温晶振长期不问断的运行,频率无法满足工作所需的准确度与稳定度,因此需要通过实时的自动调控压控端电压来进行频率校准。根据卫星时钟信号和恒温晶振时钟信号精度互补这一特点,通过调控恒温晶振的压控端,使其输出频率随之改变,以维持短期和长期的时间精度和稳定性。
恒温晶振选用俄罗斯莫里恩(Motion)公司的低漂移、低相噪薄型双恒温槽超精密恒温晶体振荡器OCXO MV180。该恒温晶振输出标准频率为10 MHz的正弦波,短期稳定度小于2x10-12/秒,年老化率为±1×10-8/年,对周围环境变化敏感度低,长期温度-频率稳定度可达±1× 10-10,还提供了一个直流电压控制端。通过向压控端施加一个0~+5 V的直流电压,可使该恒温晶振有±5 Hz左右的频率调整范围,控制电压与晶振频率的近似关系如表1所示。

2 系统设计
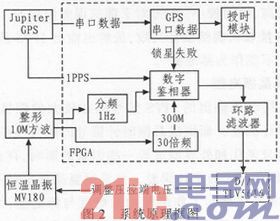
系统以FPGA作为控制器,芯片选用Altera公司的EP3C25E144C8,内部具有丰富的逻辑资源。开发平台是Quartus II集成开发环境,采用Vetilog HDL语言对各功能模块进行逻辑描述,并完成了逻辑编译、逻辑化简、综合及优化、逻辑布局布线,并使用Modelsim、Signalnap II进行逻辑仿真,实现系统的设计要求,系统的原理框图如图2所示。
2.1 数字锁相环
恒温晶振的频率调整功能是靠数字锁相环(DPLL)实现的,同模拟锁相环类似,它属于闭环的控制系统,由鉴相器(PD)、环路滤波器(LPF)、D/A转换器、压控恒温晶振(OCXO)组成。系统启动后,在FPGA内部,数字鉴相器模块首先以GPS接收机输出的10 kHz时钟信号作为基准源,对恒温晶振整形并经过分频后的10 kHz信号进行快速鉴相,用恒温晶振倍频后的300 MHz时钟对相位差进行量化,得到具体的超前或滞后数据,进而传递给环路滤波器模块,设置抖动门限参数,若相位超前或滞后量达到门限值,则迅速通过D/A转换器,对晶振的压控端电压进行相应调节。此方法可令晶振频率快速接近10 MHz,但是恒温晶振频率的改变需有一定的响应时间,快速调整压控端的电压会产生过调现象,频率稳定度不佳。
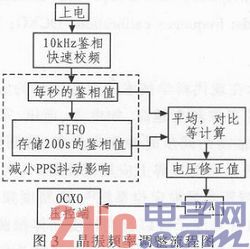
为进一步提高晶振频率的精度与稳定性,结合恒温晶振短期稳定度高的特点,在数字鉴相器模块中,以GPS的1PPS信号为基准,测量1PPS与恒温晶振分频出的1Hz信号的相位差。依据GPS没有累积误差的优点,在环路滤波器模块中采用滑动平均滤波法来降低GPS秒脉冲对测量带来的干扰,设计FIFO存储器来配合计算出最近200 s的平均相位差,通过不断对比短时的相位差及长时的平均相位差,分析相位差的长期与短期变化动态,实时调节恒温晶振的控制电压,保证晶振输出稳定且准确的10 MHz时钟信号。晶振频率调整的过程如图3所示,此方法简单实用,可有效抑制1PPS抖动对晶振造成的影响。
2.2 电路设计
D/A芯片选用TI公司TLV5616,它是低功耗单片12位串行数模转换器,分辨率为4096,该芯片采用三线制(SCLK、SYNC、DIN)串行接口,SCLK方波信号为下降沿时,TLV5616读取DIN的电平信号,转化成相应的电压送往恒温晶振,用于晶振的微调,晶振频率调整硬件电路如图4所示。

2.3 授时功能
在许多现实的应用中需要毫秒、微秒、纳秒等这些更小的时间单位量,但是GPS接收机一般只能提供最小时间单位为秒的UTC时间,本系统在GPS基础上设计了授时功能。
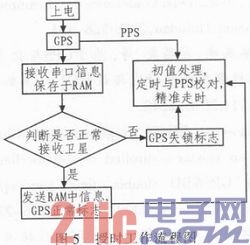
授时工作流程如图5所示,系统在FPGA中设计串口数据模块来接收GPs的SD01管脚发出的GPRMC格式数据,并将其存放在FPGA内部的双口RAM中,通过串口数据模块及数字鉴相器模块可以判断GPS接收机是否正常工作。若识别出准确的UTC时间和1PPS信号后,授时模块迅速从RAM中提取最新时间数据进行处理,得到初始时间值,当下一个1PPS上升沿到来后,系统在初值的基础上开始完全依靠高稳恒温晶振自行走时,并每隔5秒与准确的1PPS信号进行校对,如果发现本系统的时间与1PPS不同步,那么系统时间将会短暂停滞或快速跳进,达到与1PPS同步,保证时间信息输出的连续性与准确性;若GPS接收机非正常输出1PPS信号,则不进行校对,直到1PPS正常后再恢复校对功能。
3 实验结果
在卫星信号正确接收的情况下,系统可以在短时间内把恒温晶振的频率校准到较高的准确度与稳定度上。实验结果表明,恒温晶振被调节后可以输出更准确的10MHz信号,误差小于0.01 Hz,频率的精度与长期稳定性都得到明显改善。1PPS信号没有累计误差,在连续不重复的201个1PPS上升沿之间,即以200 s作为闸门时间,测出恒温晶振MV180在调控与未调控状态时,每200 s的平均频率偏差,图6为部分实际测试图,实线和虚线分别代表恒温晶振在调控与未经调控状态的测试结果,其中实线部分的平均频率偏差是-7.41x10-5Hz,均方差为3.10x10-3Hz。

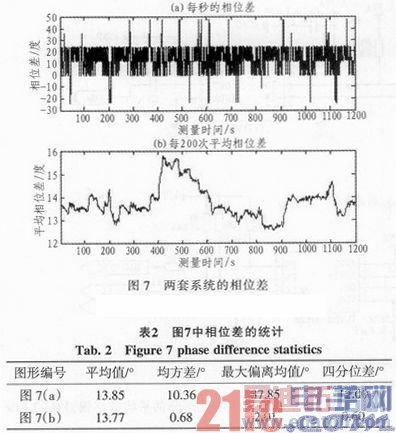
依照文中方案设计两套完全独立的系统,以其中一套系统的恒温晶振的时钟信号为基准,每秒与另一套系统的恒温晶振的时钟信号对比一次,相位差用300 MHz的时钟进行量化,测量分辨力为3.3 ns,部分测试结果如图7所示。图7(a)显示每秒测得的相位差;由于存在测量误差,因此采用滑动平均滤波的方法,在每秒测量两套系统相位差的同时,计算出最近200次的平均相位差,如图7(b)所示。表2对图7的实际测量数据进行统计,7(b)中的均方差是0.68度,四分位差为O.60度,说明两套独立系统的频率一致性很高,具有良好的稳定度。
恒温晶振经过校准后的频率偏差小于0.01 Hz,在1PPS准确输出时,累加1PPS具有的100 ns误差,授时模块输出的时间信息误差小于105 ns。当GPS接收机未正常工作时,由于恒温晶振前期经过频率校准和自身较高的稳定度,在一定时间内依然可以保证高精度的授时功能。
4 结束语
由文中的分析和详细的实验结果可知,基于GPS的秒信号对恒温晶振频率偏移的自动测量以及对晶振压控端电压的自动控制,使晶振受老化和外界干扰的影响得到了明显的抑制,能够在较短时间内将晶振校准到较高的频率准确度上,并提高长时间的稳定性。晶振频率准确度的显著提高,也有利于对授时功能的设计。总之,该系统采用实用简便的方法达到了将恒温晶振调整到较高指标的目的,具有广泛的应用价值。
如何成为一名优秀的射频工程师,敬请关注: 射频工程师养成培训
上一篇:LED将支持无线通讯宽带连接
下一篇:NFC终端的卡片模拟应用:从一卡通走向一机通
