- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
差动变压器位移测量装置在机械天平中的应用
录入:edatop.com 点击:
摘要:对线性差动变压器(LVDT)及其信号处理芯片AD598的工作原理进行了分析,利用差动式位移传感器和AD598芯片设计了具有调零功能的位移信号调理电路,并将其应用在机械天平中,将机械位移信号转化为电信号。改装后的机械天平具有读数直观,使用便捷的特点。
关键词:差动变压器;AD598芯片;机械天平
0 引言
天平是我们日常生活中常用的计量器具之一,也是计量部门进行质量量值传递不可缺少的重要计量器具,其性能好坏直接影响质量量值传递的可靠性,其中机械天平是一种传统的仍被广泛应用的精密仪器。
传统机械天平使用时,依靠观察机械式指针左右摆幅是否一致来判断天平平衡,准确测量出指针摆动的幅度是关键。机械天平两个秤盘中重量的差引起指针摆幅变化,这种指针摆幅的变化可视作微位移量,寻找一种方法将这种微位移扩大,利于提高天平精度。差动变压器式位移传感器(LVDT)是一种灵敏度较高的互感式传感器。具有分辨力高、稳定性好、精度高、温度影响小等良好特性。
本文在传统LVDT式位移传感器的基础上,使用AD598芯片来设计位移传感器电路,并将位移传感器应用在机械天平上对其进行改进,使用位移传感器和电流表代替原来的机械式指针和金属读数标盘。
1 位移传感器工作过程
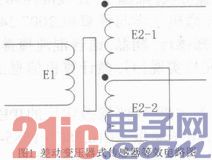
差动变压器式传感器是把被测位移量转换为一次线圈与二次线圈间的互感量M的变化的装置。当一次线圈接入激励电源之后,二次线圈就将产生感应电动势,当两者间的互感量变化时,感应电动势也相应变化。由于两个二次线圈采用差动接法,故称为差动变压器。等效电路图如图1所示。
将LVDT式位移传感器中的铜片固定在机械天平的指针上,如图2所示。
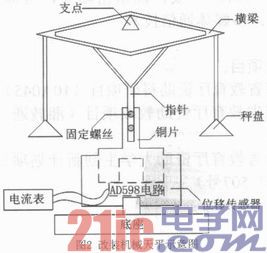
机械天平两个秤盘中重量的差引起指针摆幅变化,铜片也随指针左右摆动,通过位移传感器将机械位移量转化为电量。位移传感器次边输出电压通过AD598电路检测后,最终由电流表显示。
2 AD598芯片工作原理
AD598是一种完整的单片式线位移差动变压器信号调节系统。AD598与LVDT配合,能够直接将LVDT的机械位移量转化成为单极性或双极性输出的高精度直流电压。AD598芯片同时具有交流信号的放大、相敏检波器、直流信号放大、产生正弦波振荡器、滤波电路等功能,在外围电路的构造中只要增加几个外接无源元件,就能确定激磁频率和输出电压的幅值。
AD598芯片原理图如图3所示,该芯片主要包含两部分:一部分为正弦波发生器,它的频率及幅值均可由少数外接元件确定;另一部分为LVDT次级的信号处理部分,通过这一部分产生一个与铁芯位移成正比的直流电压信号。
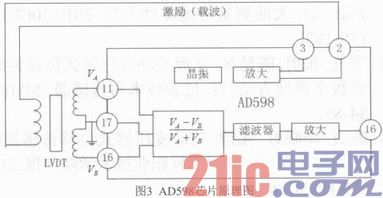
AD598既可驱动高达24 V、频率范围为20 Hz~20 kHz的LVDT原边线圈,又可接收最低为100 mV的次级输入,所以适用于许多不同类型的LVDT。ADS98芯片工作时,输出的正弦波直接作用于差动变压器的初级线圈;而传感器次级线圈输出的两个正弦波则可直接作为AD598的输入,AD598对它们进行处理,产生一个标定的单极性或双极性直流电压信号,其传递函数为:
![]()
其中VA,VB为传感器次级线圈输出的两个正弦波电压;IREF为参考电流,一般取为500 μA;R2为输出电压调节电阻。
3 传感器信号调理电路
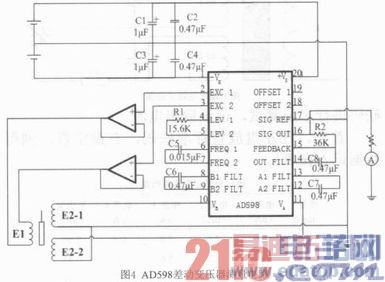
将LVDT与AD598连接在一起,再配上一些电阻器和电容器,就组成一个精密位移传感器。如图4所示。
3.1 参数选择
双端供电情况下,参数选择过程如下:
(1)确定测量系统的机械频带:fSUBSYSTEM;
(2)选择LVDT的激励频率:fEXCITATION=10×fSUBSYSTEM;
(3)确定LVDT次级电压和VA+VB:用典型的激励电压VPRI激励LVDT,将铁芯移动到中间零点位置时,测出VA和VB值并求和;
(4)确定最佳激磁电压VEXC:在LVDT初级加上典型激励电压VPRI,然后将铁芯放在满量程位置,测出次级最大输出电压VSEC,确定出LVDT的电压转换比VTR;
VTR=VPRI/VSEC (2)
VEXC=VSEC×VTR (3)
(5)对于双端供电,查阅AD598芯片手册,根据VEXC确定电阻R1;
(6)确定激磁电压频率C1:C1=35 μF×Hz/fEXCITATION;
(7)选择确定激磁电压频率的电容C2、C3和C4,C2=C3=C4=10-4F×Hz/fSUBSYSTEM;
(8)选择决定AD598增益和满量程输出电压范围的电阻R2。
R2=VOUT×(VA+VB)/(S×VPRI×500 μA×d) (4)
3.2 调零电路
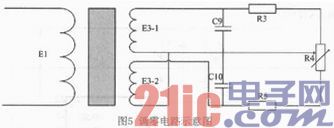
实际应用中发现,铁芯位于LVDT中心处时,输出电压并不为零。其原因是初级线圈与次级线圈之间存在有与铁芯位置无关的杂散电容,以及绕组和磁路中缺少对称性。此外,传感器安装在机械天平的过程中也不能保证完全的对称性。为此设计了如图5所示的调零电路,即在原来激励线圈的基础上,在副边增加了E3-1和E3-2调整线圈,实现了调零功能。
4 实验
微位移信号检测电路调试后,安装在机械天平上,分别用10mg、20mg、30mg、40mg、50mg标准砝码进行多组测试,记录输出电流。
首先,在左盘放置标准砝码,右盘空置,测得数据记入在表1。

在右盘放置标准砝码,左盘空置,重新用相同质量的砝码进行检测,测得数据记入在表2,针对表1、2数据,对质量和相应的平均电流进行曲线拟合,以天平左右托盘中砝码的质量差作为曲线横坐标,输出电流作为纵坐标,从图6可以看出,质量与电流基本符合比例关系。通过调零电路进行调节,零点输出电流近似为零,两条直线斜率绝对值基本一致,曲线近似于V字型。


针对表1、2数据,运用Matlab对数据进行拟合得到方程:
y(μA)=0.2514x(mg)+0.086 (5)
y(μA)=-0.2508x(mg)+0.112 (6)
5 结论
在机械天平基础上,使用AD598芯片和差动位移传感器设计微位移检测电路,通过位移检测电路将天平指针的摆幅位移信号放大并转化为电信号,并在传感器中加入补偿绕组,使用调零电路。运用标准砝码进行实际称重测试发现改装后天平重复性较好,使用更加直观,便捷,具有提高最小分度值的潜力。
如何成为一名优秀的射频工程师,敬请关注: 射频工程师养成培训
上一篇:X波段2×3平面开关矩阵设计
下一篇:LabVIEW还是C语言?
