- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于机器视觉的物体包装盒实时贴标系统设计
录入:edatop.com 点击:
摘要:为了实现打印贴标机智能贴标的需求,提出了一种基于机器视觉的物体包装盒实时贴标系统设计方案,并完成了系统的软件设计和整套硬件测试。该系统的硬件部分主要用来获取图像数据以及进行打印贴标操作,软件部分采用基于轮廓提取和形状特征识别相结合的图像处理技术,能够完成对其输出图像进行目标识别和实时定位,并通过串口通信将数据转发给控制系统。实际应用表明,该系统具有操作简便、测试准确的特点,达到了设计要求。
关键词:机器视觉;目标识别;实时定位;串口通信
目前,工业生产上对物体包装盒的贴标主要采用光电传感器等触发机器的方式,并通过计算距离、速度等方式估算目标物的位置,这样贴出来的标签精度不高,需要再度进行人工检测,费时耗力,不能满足大规模的高精度贴标需求。由于机器视觉系统可以快速获取大量信息,而且易于自动处理,也易于同设计信息以及加工控制信息集成,因此,机器视觉已广泛应用于工业检测、工业探伤、精密测控、自动化生产、邮政自动化、粮食选优、显微医学操作以及各种危险场合工作的机器人等领域。打印贴标行业为了提高生产力,获取快速、高效的贴标方法,引进机器视觉技术已成为大势所趋,首先通过对目标物的识别和实时定位来获取所需的位姿信息,再通过摄像机标定得到目标物在线上的精确坐标,最后交由贴标机器进行贴标操作。
可见,对目标物的实时位姿信息的获取变得非常重要。为了实现对目标物的快速识别和准确定位,在做了需求分析的基础上,提出并设计了一种基于机器视觉的物体包装盒实时贴标系统(以下简称"贴标系统")设计方案。该系统能够完成对目标物准确贴标,具有应用价值。
1 系统需求分析
针对为满足实时获取物体包装盒精确位置的需求,结合实际平台与应用场景,经过分析主要从物体轮廓进行切入,因所有物体的外包装盒均为规则的长方体,故而采取经过一系列图像预处理后再对目标物进行矩形检测的办法得到包装盒贴标面的中心点坐标。
要想完成以上系统的设计,需要做好以下几个方面。首先需要能够驱动工业相机,并通过硬件触发的方式使相机能够在合适的时机获取多张图片;其次,应能对相机获取到的图片进行有效的图像处理,需进行一系列的算法设计从而能够实时获取目标物的图像坐标;再次,还应进行摄像机标定,将获取到的目标物图像坐标转换成世界坐标系也就是机器线上的真实坐标;最后系统要能够与上位机控制部分集成并能够持续不间断的运作,直到系统要求退出。
2 系统总体设计
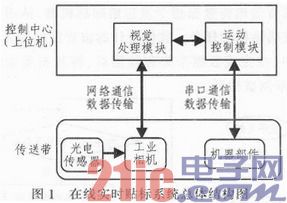
该贴标系统总体结构图如图1所示,首先传送带将目标物输送至工业相机的视野,并触发光电传感器给出一个3.3~12 V高电平信号触发相机进行抓拍,获取目标物的图像信息;然后,通过千兆网线将图像数据传输至控制中心(上位机),上位机的视觉处理模块将对获取到的图像进行处理,并将处理得到的数据交由运动控制模块;接着,运动控制模块根据获取到的有效数据实行对机器部件的命令控制;最后,机器部件根据上位机的指示进行打印和贴标操作,从而实现一次完整的贴标过程。
3 系统硬件平台
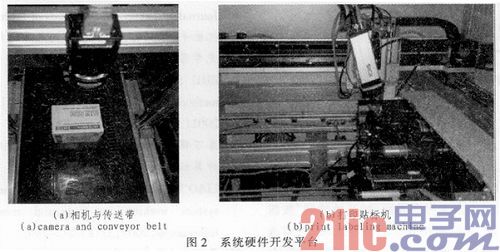
贴标系统硬件平台主要由光电传感器、工业相机、传送带、工业PC、开关电源、打印贴标模块和检测模块等组成,系统硬件开发平台如图2所示。光电传感器主要用来给出一个3.3~12 V高电平信号触发工业相机进行目标物图像的实时获取;MV-VEM系列千兆网络相机采用帧曝CCD作为传感器,能输出高质量,颜色还原性好的图像,并以网络作为输出,将获取到的图像数据输送至工业PC;打印贴标模块主要由打印机和贴标机两部分组成,打印机主要用来打印特定标签,贴标机负责将标签贴在目标物指定位置;检测模块用来最终检测贴好的标签是否符合要求以及扫描出相应标签的条形码或者二维码。工业PC是该贴标系统的核心,用来实现系统中指令的发送、数据的采集与处理和测试结果的显示等。
4 系统软件设计
该贴标系统的软件采用MFC和OpenCV编程。OpenCV(Open Source Computer Vision Library)是由Intel公司资助的开源计算机视觉库。它由一系列C函数和少量CH类所组成,实现图像处理和计算机视觉方面的很多通用算法,例如特征检测与跟踪、运动分析、目标分割与识别以及3D重建等,是近年来比较流行的图像处理数据库。系统软件设计的结构图如图3所示。
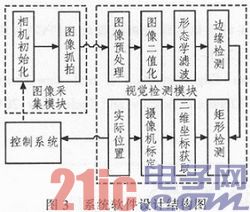
在软件设计中,图像采集模块主要是采用西安维视公司生产的MV-VEM120C型号的千兆网络工业相机,该相机具有高分辨率、高精度、高清晰度、色彩还原性好、低噪声等优点,能够满足工业级图像处理要求,通过调用该相机的API,实现对目标物图像数据的采集。视觉检测模块主要用来对获取到的图像信息进行实时处理,处理流程主要有以下几步:首先通过图像灰度化、图像分割等一系列图像预处理,生成二值图像。然后利用形态学处理去除二值图像噪声。
形态学滤波是在数学形态学基础上提出的一种噪声去除方法,它由一组形态学代数运算子组成,包括膨胀、腐蚀、开启和闭合4个基本运算。数学形态学方法利用一个称为结构元素的"探针"收集图像的信息,当"探针"在图像中不断移动时,便可考察图像各个部分之间的相互关系,从而了解图像的结构特征。
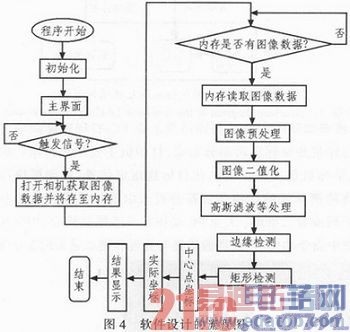
接着在二值图像中对物体包装盒图像进行边缘检测,获取到物体包装盒的轮廓线条,然后对其进行矩形检测,从而实现对目标物贴标面顶点坐标的提取,进而可以求出贴标面的中心点坐标,以及偏转角度等信息;但是这里获取到的坐标数据只是图像的像素坐标,仍然不能用于实际的定位,还需进行摄像机标定,将图像数据转换成世界坐标系的坐标数据。只有求出了目标物在实际生产线上的坐标位置,控制部分才能有效地将数据指令发送给贴标机器,从而实现打印贴标机准确贴标的任务。软件设计的流程图如图4所示。测试过程中,在完成数据采集和检测后,将数据发送给主控模块,并显示测试结果。
5 应用测试
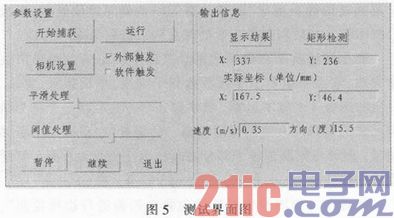
该贴标系统用于上海科道物流科技有限公司自主研发的打印贴标机上测试。在进行测试时,首先运行该系统应用软件,初始化相关操作后,通过完成相应的相机设置和参数配置等设置后,然后通过点击主程序界面的"开始捕获"按钮进行目标物图像的获取,这时相机处于等待触发状态,当选择为外部触发,相机将根据收到的高电平信号,进行抓拍,也可选择软件触发方式:在主界面中通过点击"显示结果"按
钮,可以实现对输出数据的实时显示;"数据发送"按钮负责将图像处理得到的位置、速度、方向等数据实时发送给上位机主控模块。程序面板的部分界面如图5所示。该测试系统测试结果误差在1 mm以内,达到实际应用要求。
6 结论
该贴标系统采用具有高度智能、高速度的打印贴标机为硬件平台,软件设计采用模块化设计思想,提高了系统的可靠性和维护性。该贴标系统已用于上海科道物流科技有限公司生产的贴标打印机进行测试,实际应用表明该贴标系统具有测试准确、稳定可靠、人机界面友好等特点,达到了设计要求。
如何成为一名优秀的射频工程师,敬请关注: 射频工程师养成培训
上一篇:简述调频广播发射机
下一篇:基于光纤传输的延时系统设计
