- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
二次雷达系统干扰等问题的解决方法
录入:edatop.com 点击:
一、二次雷达系统简介
二次雷达(Secondary Surveillance Radar,SSR)不同于一次雷达,它需要目标发射应答信号来配合工作,因此被探测目标上必须装有专用设备(称为应答机)。整个系统至少由询问器和应答机两部分组成。
二次雷达既具有雷达系统测向和定位的特点,又包含了通信系统的传输信息的功能。它在军事上和航空管制上起着重要的作用[1],其中的一个重要领域是敌我识别。应用中发现它存在混扰、窜扰等内部干扰,从而导致系统性能下降。
二、现有二次雷达系统存在的问题
1.二次雷达系统的特点
根据二次雷达的工作特点我们发现:现有的二次雷达系统,由于采用“全呼叫”方式和同频工作,系统内部存在着各种干扰,如窜扰、混扰、占据、旁瓣干扰等。这些干扰对系统的性能有严重的影响。
2.使用中存在的问题
(1)窜扰
当两部以上的询问机相继对空中的多部应答机进行询问时,应答机对每个询问信号均会产生回答。因此,每个询问机接收到的应答信号中,除应答机对自己的回答 信号外,还有该应答机对另一部询问机的回答信号,后者对本询问机实际上是一种干扰,且不可能与本询问信号同步故称窜扰或异步干扰。
(2)混扰
当询问天线波束内有两个或两个以上的我方目标时,询问机可以收到询问天线波束内的所有应答机的回答信号。由于回答的信号占有一定持续时间,所以当两个目标接近时,询问机收到的信号会相互交错、重叠,妨碍正确译码,造成干扰,故称之为混扰.
(3)占据
在应答机接收一询问信号至转发完回答信号的一段时间内,该应答机不可能响应其他的询问,即应答机被占据了。应答机被占据的时间tc计算公式如下:

式中ti表示询问信号的持续时间;tr表示应答信号的持续时间;td表示应答器的平均延迟;trc表示应答器的恢复时间。
二次雷达军用和民用系统都存在相互干扰问题,这些的问题一直以来都存在,而且对系统性能的影响也很大,但是目前还没有一个很完善的办法能使这些干扰得到 全面解决。本文拟从信号设计的角度来解决这些问题,使得系统性能得到很大的改善,并且可以同时解决多个问题,同时工程上也易于实现。
1.二次雷达系统的特点
根据二次雷达的工作特点我们发现:现有的二次雷达系统,由于采用“全呼叫”方式和同频工作,系统内部存在着各种干扰,如窜扰、混扰、占据、旁瓣干扰等。这些干扰对系统的性能有严重的影响。
2.使用中存在的问题
(1)窜扰
当两部以上的询问机相继对空中的多部应答机进行询问时,应答机对每个询问信号均会产生回答。因此,每个询问机接收到的应答信号中,除应答机对自己的回答 信号外,还有该应答机对另一部询问机的回答信号,后者对本询问机实际上是一种干扰,且不可能与本询问信号同步故称窜扰或异步干扰。
(2)混扰
当询问天线波束内有两个或两个以上的我方目标时,询问机可以收到询问天线波束内的所有应答机的回答信号。由于回答的信号占有一定持续时间,所以当两个目标接近时,询问机收到的信号会相互交错、重叠,妨碍正确译码,造成干扰,故称之为混扰.
(3)占据
在应答机接收一询问信号至转发完回答信号的一段时间内,该应答机不可能响应其他的询问,即应答机被占据了。应答机被占据的时间tc计算公式如下:
式中ti表示询问信号的持续时间;tr表示应答信号的持续时间;td表示应答器的平均延迟;trc表示应答器的恢复时间。
二次雷达军用和民用系统都存在相互干扰问题,这些的问题一直以来都存在,而且对系统性能的影响也很大,但是目前还没有一个很完善的办法能使这些干扰得到 全面解决。本文拟从信号设计的角度来解决这些问题,使得系统性能得到很大的改善,并且可以同时解决多个问题,同时工程上也易于实现。
三、系统方案设计
本次设计的基本思路是采用了时分多址(TDMA)技术的思想,综合考虑了信号格式和时间结构来实现一种通用波形设计,可大大降低系统内部干扰,提高识别概率。
本系统是一个时间同步系统,时间同步是任何采用时变和密码安全系统的基础[2],系统内每个工作站都要求严格按照统一时间来工作。以下从其时间关系与系统工作过程方面进行详细讨论。
1.系统时间同步关系
系统由图1所示的询问机和应答机以及校时设备等组成,采用了时间同步技术。它的询问和应答的参数随时间而变化。由于时间同步,所有设备都预先知道每次发射的特性参数;而对其它系统来说,发现的信号其时间、编码等都是随机的、不可预测的,从而可以阻止其它欺骗和干扰。
本次设计的基本思路是采用了时分多址(TDMA)技术的思想,综合考虑了信号格式和时间结构来实现一种通用波形设计,可大大降低系统内部干扰,提高识别概率。
本系统是一个时间同步系统,时间同步是任何采用时变和密码安全系统的基础[2],系统内每个工作站都要求严格按照统一时间来工作。以下从其时间关系与系统工作过程方面进行详细讨论。
1.系统时间同步关系
系统由图1所示的询问机和应答机以及校时设备等组成,采用了时间同步技术。它的询问和应答的参数随时间而变化。由于时间同步,所有设备都预先知道每次发射的特性参数;而对其它系统来说,发现的信号其时间、编码等都是随机的、不可预测的,从而可以阻止其它欺骗和干扰。
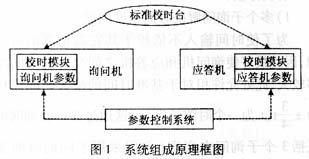
时间同步法的基本设计原理就是将询问和应答限制在一伪随机的、精确的时间内[4]。以下主要从信号设计满足的时间结构体系、信号设计原理、时间精度问题三方面来详细描述这个时间同步系统。
(1)时间结构体系
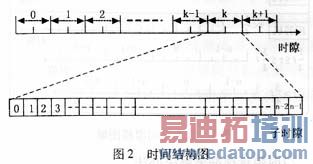
图2为采用的定时体系。整个时间系统按时隙划分,每个时隙又分为若干个子时隙,具体时隙、子时隙的长度(持续时间)视不同系统具体确定,但是必须要满足一个要求:一个最小时间间隔(此处为子时隙)至少要大于系统最大作用距离的时延。
(1)时间结构体系
图2为采用的定时体系。整个时间系统按时隙划分,每个时隙又分为若干个子时隙,具体时隙、子时隙的长度(持续时间)视不同系统具体确定,但是必须要满足一个要求:一个最小时间间隔(此处为子时隙)至少要大于系统最大作用距离的时延。
(2)信号设计原理
询问和应答信号的发射参数是以上述时间结构体系内的时隙、子时隙为基础的,即每次询问要先选定某一发射时隙,这个时隙主要用于收发双方正确发射与接收, 然后在这个时隙内随机地选定一个子时隙作为发射时刻起始点,根据时间同步系统原理,此时应答机可以根据自身的时间参数来接收询问信号,并根据接收到的询问 信号,来确定询问信号的发射时刻,并选定相应的应答子时隙发射回答信号。总之,信号设计的关键点如下:
1)应答机能否接收到询问信号要看它与询问机间的时间漂移是否满足设计要求,即系统要满足规定的时间精度要求;
2)时隙、子时隙是询问应答信号的关键参数。
(3)时间精度问题
时间同步系统的设计难点在于时间精度要求高,时隙选择容易发生冲突,针对这两个问题,给出以下解决办法:
1)多个子询问解决时间精度问题
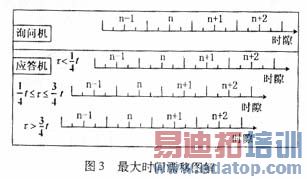
为了使时间输入不依赖于其它高精度的时间源,因此最好使询问机和应答机之间允许的时间漂移较大,此处允许相对于基准时间的最大时间漂移为 (t 为一个时隙长度)。这通过在一次询问中包括3个子询问来实现(它们采用不同的时间参数,即当前、前次、下次的时间)。3个子询问依次分别对应“早发”、 “晚发”、“按时”的应答机。因此,它们的时间参数分别为n +1、 n -1 、n。时间漂移解决原理具体图解如图3所示,它只表示了应答机相对于询问机为超前状态(超前时间设为τ,延后的情况原理相同)。显然,应答机根据自身的时 间参数接收信号,只要它们的时间漂移在内都能接收到询问信号。
(t 为一个时隙长度)。这通过在一次询问中包括3个子询问来实现(它们采用不同的时间参数,即当前、前次、下次的时间)。3个子询问依次分别对应“早发”、 “晚发”、“按时”的应答机。因此,它们的时间参数分别为n +1、 n -1 、n。时间漂移解决原理具体图解如图3所示,它只表示了应答机相对于询问机为超前状态(超前时间设为τ,延后的情况原理相同)。显然,应答机根据自身的时 间参数接收信号,只要它们的时间漂移在内都能接收到询问信号。
询问和应答信号的发射参数是以上述时间结构体系内的时隙、子时隙为基础的,即每次询问要先选定某一发射时隙,这个时隙主要用于收发双方正确发射与接收, 然后在这个时隙内随机地选定一个子时隙作为发射时刻起始点,根据时间同步系统原理,此时应答机可以根据自身的时间参数来接收询问信号,并根据接收到的询问 信号,来确定询问信号的发射时刻,并选定相应的应答子时隙发射回答信号。总之,信号设计的关键点如下:
1)应答机能否接收到询问信号要看它与询问机间的时间漂移是否满足设计要求,即系统要满足规定的时间精度要求;
2)时隙、子时隙是询问应答信号的关键参数。
(3)时间精度问题
时间同步系统的设计难点在于时间精度要求高,时隙选择容易发生冲突,针对这两个问题,给出以下解决办法:
1)多个子询问解决时间精度问题
为了使时间输入不依赖于其它高精度的时间源,因此最好使询问机和应答机之间允许的时间漂移较大,此处允许相对于基准时间的最大时间漂移为
2)时隙选择冲突解决办法
正常工作时,设置为一个询问占用半个时隙,一个时隙内的2次询问,它们分别占用前后半个时隙,为了减少这2次询问间的冲突,它们的参数设置必须遵循一定规则:
①前、后半个时隙内询问的“开始时刻”的位置必须规定一个的范围(以第3个子询问的位置为参照),这样可允许的询问位置在这个范围内选择;
②后半个时隙内的询问不允许与前半个的询问重叠。
另外,为了满足需要的识别概率,每个询问可由几次连续询问完成。因此,整个询问在连续的几个时隙内发送,各次询问均遵守上述①和②的规则。
以上设计基本思想是:询问和应答的发射起点是按时间段来划分的,并且通过设计每次询问包括3个子询问,不但可以使系统的时间精度要求降低,最重要的是,它可以通过发射时刻限制来减少冲突有效地减少了混扰、窜扰等内部干扰以及占据等系统存在的问题。
2.系统工作过程
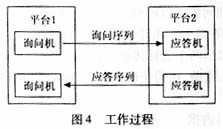
图4显示了基本二次雷达系统完成一次成功询问╱应答的整个工作过程。
正常工作时,设置为一个询问占用半个时隙,一个时隙内的2次询问,它们分别占用前后半个时隙,为了减少这2次询问间的冲突,它们的参数设置必须遵循一定规则:
①前、后半个时隙内询问的“开始时刻”的位置必须规定一个的范围(以第3个子询问的位置为参照),这样可允许的询问位置在这个范围内选择;
②后半个时隙内的询问不允许与前半个的询问重叠。
另外,为了满足需要的识别概率,每个询问可由几次连续询问完成。因此,整个询问在连续的几个时隙内发送,各次询问均遵守上述①和②的规则。
以上设计基本思想是:询问和应答的发射起点是按时间段来划分的,并且通过设计每次询问包括3个子询问,不但可以使系统的时间精度要求降低,最重要的是,它可以通过发射时刻限制来减少冲突有效地减少了混扰、窜扰等内部干扰以及占据等系统存在的问题。
2.系统工作过程
图4显示了基本二次雷达系统完成一次成功询问╱应答的整个工作过程。
3.询问╱应答定时结构
一次询问╱应答在时隙内的时间关系见图5。它经历了4个最主要的过程:询问机发送询问信号过程、应答机接收询问、应答机发送应答信号、询问机接收过程。 其中询问机可以在空时隙内任意选择一个开始时刻发送,但是应答机不具备任何时间灵活性,它只是在询问时刻之后的几个子时隙内随机选择。这样有助于整个系统 的统一接收处理。
一次询问╱应答在时隙内的时间关系见图5。它经历了4个最主要的过程:询问机发送询问信号过程、应答机接收询问、应答机发送应答信号、询问机接收过程。 其中询问机可以在空时隙内任意选择一个开始时刻发送,但是应答机不具备任何时间灵活性,它只是在询问时刻之后的几个子时隙内随机选择。这样有助于整个系统 的统一接收处理。
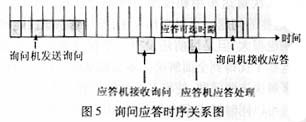
其中由于询问和应答时间关系明确,这样询问机通过计算询问信号与来自应答机的同步应答信号之间的延迟可以计算出它与应答机的距离,来获得一些其它的信息,以及在信号格式的设计中提供一定的信息来加强对询问旁瓣干扰的抑制,从而减少混扰、窜扰、占据等系统问题。
四、系统性能分析
实际工作环境下的系统是一种多站工作。要严格地计算在多站工作条件下的混扰、窜扰、占据概率,必须详细地知道目标作用范围内询问机应答机数目、询问机的 询问速率以及每个询问站的主瓣有效辐射功率、旁瓣辐射功率等。实际上很难确切地知道这些参数,但是对于本系统我们可以从影响混扰、窜扰的主要因素来讨论, 同时占据概率计算可以用经典排队论来解决。
1.混扰、窜扰影响
时间同步技术后系统混扰问题的解决可以通过用户对时隙的不同选择而将不同信号从时间上区分开,这时造成混扰的主要因素在于多部应答机选中同一子时隙而发 生冲突,混扰问题属于经典概率问题中的等可能概型事件。假定同一时刻有n部应答机有应答需求,而它们可以在m个可选子时隙种选择,混扰概率ph为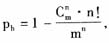 典型数据如取m=60,n=3,得到混扰概率ph为 4.95%,因此成功率达95%以上。
典型数据如取m=60,n=3,得到混扰概率ph为 4.95%,因此成功率达95%以上。
窜扰是询问机可能收到同一部应答机的几个不同的信号,但是这些信号是非同步的,因为它们是该部应答机分别对不同询问机的回答信号。应用TDMA技术后, 窜扰的发生已经很小了,因为同一部应答机对不同询问的应答时间需要参考询问信号的时间基准,这样它们发射后被询问机误判的可能性极小。
2.占据影响
应答机被占据是严重影响识别概率的一个因素。这里等效系统工作环境为:一部应答机需要处理的询问信号源源不断(没有较长的空闲期,否则不存在占据问 题),因此对一部应答机的工作可以用排队论的理论来解释。它的工作过程可以描述为一种损失制排队系统。输入过程(询问信号到达)为泊松过程,排队规则时损 失制(应答机忙时,不对询问信号响应),服务机构为(一个服务台,服务时间为负指数分布),即M/M/1/1系统[3]。
这种描述对一般二次雷达系统的应答机占据问题都适用。与非时间同步系统(以下简称原系统)相比,时间同步系统(以下简称新系统)的特殊在于到达率上:每 一个时隙内有询问需求的用户有一个选择自主权(要在规定的时隙开始问,并且可以选择后面的时隙),而不是想问就立即问。这样我们可以称为每一个有需求的用 户以概率p选择本时隙,因此到达率由λ(一个时间单位内有询问需求的询问机数量,其决定因素主要有天线方向图、询问机数量,以及工作环境等)变成了λ′=λp,是指能够成功选择到询问时隙的询问机。而应答机的处理过程没有太大区别,都满足参数为μ的负指数分布( =tc,tc见公式(1),是处理单个询问信号的占据时间)。因此应答机的占据概率等于信号的丢失率,这可以应用著名的爱尔朗损失公式[3] :
=tc,tc见公式(1),是处理单个询问信号的占据时间)。因此应答机的占据概率等于信号的丢失率,这可以应用著名的爱尔朗损失公式[3] :

表1表示了两种系统的统计特性。
实际工作环境下的系统是一种多站工作。要严格地计算在多站工作条件下的混扰、窜扰、占据概率,必须详细地知道目标作用范围内询问机应答机数目、询问机的 询问速率以及每个询问站的主瓣有效辐射功率、旁瓣辐射功率等。实际上很难确切地知道这些参数,但是对于本系统我们可以从影响混扰、窜扰的主要因素来讨论, 同时占据概率计算可以用经典排队论来解决。
1.混扰、窜扰影响
时间同步技术后系统混扰问题的解决可以通过用户对时隙的不同选择而将不同信号从时间上区分开,这时造成混扰的主要因素在于多部应答机选中同一子时隙而发 生冲突,混扰问题属于经典概率问题中的等可能概型事件。假定同一时刻有n部应答机有应答需求,而它们可以在m个可选子时隙种选择,混扰概率ph为
窜扰是询问机可能收到同一部应答机的几个不同的信号,但是这些信号是非同步的,因为它们是该部应答机分别对不同询问机的回答信号。应用TDMA技术后, 窜扰的发生已经很小了,因为同一部应答机对不同询问的应答时间需要参考询问信号的时间基准,这样它们发射后被询问机误判的可能性极小。
2.占据影响
应答机被占据是严重影响识别概率的一个因素。这里等效系统工作环境为:一部应答机需要处理的询问信号源源不断(没有较长的空闲期,否则不存在占据问 题),因此对一部应答机的工作可以用排队论的理论来解释。它的工作过程可以描述为一种损失制排队系统。输入过程(询问信号到达)为泊松过程,排队规则时损 失制(应答机忙时,不对询问信号响应),服务机构为(一个服务台,服务时间为负指数分布),即M/M/1/1系统[3]。
这种描述对一般二次雷达系统的应答机占据问题都适用。与非时间同步系统(以下简称原系统)相比,时间同步系统(以下简称新系统)的特殊在于到达率上:每 一个时隙内有询问需求的用户有一个选择自主权(要在规定的时隙开始问,并且可以选择后面的时隙),而不是想问就立即问。这样我们可以称为每一个有需求的用 户以概率p选择本时隙,因此到达率由λ(一个时间单位内有询问需求的询问机数量,其决定因素主要有天线方向图、询问机数量,以及工作环境等)变成了λ′=λp,是指能够成功选择到询问时隙的询问机。而应答机的处理过程没有太大区别,都满足参数为μ的负指数分布(
表1表示了两种系统的统计特性。
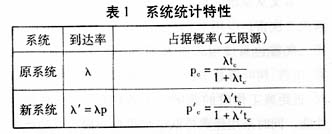
计算占据概率最关键的指标之一是到达率λ′,这要根据具体系统来统计计算。新系统中λ′≤λ,显然系统的占据概率大大降低。
3.识别概率
识 别概率贯穿于系统技术体制乃至整个系统设计、设备设计过程中的一个核心指标[4]。根据用户多少我们可以分为单站工作和多站工作识别概率。根据文献 [6],单站工作目标检测概率是询问器和应答机一对一工作条件下检测协同目标的概率,它与应答机回答概率、询问器译码概率以及询问器信号处理方法有关,单 站工作一次询问的目标检测概率p1为

式中pT为应答机回答概率,在单站工作条件下,应答机回答概率为应答机译码概率pTr,pI为询问器译码概率。
多站工作条件下应答机回答概率pT取决于应答机译码概率和占据概率:pT=(1-pc)·pTr。新型系统中的Pc降低,pT就得到提高;而询问机的译码概率pI跟系统混扰、窜扰有密切关系。混扰、窜扰减少,将大大有利于pI的提高。pT、pI都提高,因此pI也相应提高。而且在多站工作条件下,二次雷达通常采用滑窗技术,使用滑窗技术后的目标检测概率[5]pd为

式中m为滑窗长度,h为检测目标所需要的最少回答门限值,pI为一次询问检测概率。
时间同步新型系统中,系统的识别概率在其它条件相同下得到显著提高。
3.识别概率
识 别概率贯穿于系统技术体制乃至整个系统设计、设备设计过程中的一个核心指标[4]。根据用户多少我们可以分为单站工作和多站工作识别概率。根据文献 [6],单站工作目标检测概率是询问器和应答机一对一工作条件下检测协同目标的概率,它与应答机回答概率、询问器译码概率以及询问器信号处理方法有关,单 站工作一次询问的目标检测概率p1为
式中pT为应答机回答概率,在单站工作条件下,应答机回答概率为应答机译码概率pTr,pI为询问器译码概率。
多站工作条件下应答机回答概率pT取决于应答机译码概率和占据概率:pT=(1-pc)·pTr。新型系统中的Pc降低,pT就得到提高;而询问机的译码概率pI跟系统混扰、窜扰有密切关系。混扰、窜扰减少,将大大有利于pI的提高。pT、pI都提高,因此pI也相应提高。而且在多站工作条件下,二次雷达通常采用滑窗技术,使用滑窗技术后的目标检测概率[5]pd为
式中m为滑窗长度,h为检测目标所需要的最少回答门限值,pI为一次询问检测概率。
时间同步新型系统中,系统的识别概率在其它条件相同下得到显著提高。
五、结论
本 文从系统的角度通过恰当的信号设计方式来解决二次雷达应用上常出现的内部干扰等问题,使得二次雷达系统可以在相对不利的环境下(如烟雾、雨雪、树叶等恶劣 的自然环境以及很多和平台同时、近距离工作时的恶劣的工作环境)获得较好的性能。同时采用经典排队论的思想来研究系统性能的方式,有助于系统优化设计。
本 文从系统的角度通过恰当的信号设计方式来解决二次雷达应用上常出现的内部干扰等问题,使得二次雷达系统可以在相对不利的环境下(如烟雾、雨雪、树叶等恶劣 的自然环境以及很多和平台同时、近距离工作时的恶劣的工作环境)获得较好的性能。同时采用经典排队论的思想来研究系统性能的方式,有助于系统优化设计。
