- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
GPS接收机载波跟踪环路解决方案
录入:edatop.com 点击:
0 引 言
随着GPS 卫星应用产业化进程的逐步发展,对导航接收机关键技术的攻关必将缩短卫星导航终端产品的研发周期,推进卫星导航应用产业化的进程。在GPS 接收机中利用何种技术来快速跟踪卫星多普勒频偏的变化是面临的主要挑战。载波跟踪环路设计是GPS 接收机中非常重要的环节,其性能的好坏直接影响到接收机的灵敏度。
本文通过GPS 接收机中载波跟踪环路的设计与研究,讨论载波跟踪环路的实现方法和需要注意的细节,最后经过Matlab 仿真比较了几种鉴频和鉴相算法的性能,证明本文采用的算法正确合理,且适应高动态环境下对GPS 信号的跟踪。
1 载波跟踪环路基本模型
GPS 接收机完成对信号的捕获、码跟踪后进入载波跟踪环路,图1 给出了载波跟踪环路的基本模型。
载波预检测积分时间、载波环鉴别器和载波环滤波器决定了载波跟踪环的特性。为了容忍动态应力,预检测积分时间应当短,鉴别器应为一个FLL,载波环滤波器的带宽应当宽,但是为了使载波测量精确,预检测积分时间应当长,鉴别器应为一个PLL,且载波环滤波器带宽应当窄。为了解决这个矛盾,本文采用了一种二阶FLL 辅助三阶锁相PLL 的方法,使环路从FLL有效过渡到PLL,既保证了接收机的动态性能,又提高了载波测量的精度。
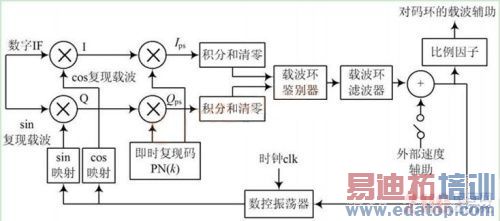
图1 GPS 接收机载波跟踪环方框图
2 频率鉴别器
FLL 通过复现卫星近似的频率来完成载波剥离过程,信号I 和Q 的采样时间不应跨越数据比特的跳变,在初始信号捕获期间,接收机并不知道数据跳变的边界在哪里。在完成比特同步的同时,与相位锁定相比,一般说来更易与卫星信号保持频率锁定。常用的频率鉴别器为四象限反正切鉴别器,其表达式为:

式中: cr ss = I ps1×Qps2 - I ps2 Qps1 ;dot = I ps1×I ps2 + Qps1×Qps2 ;I ps1 和Qps1 是在时刻t 1 下的相关值;I ps2 和Qps2 是在时刻t2 下的相关值;t2- t1 为预检测积分时间。
采用这种鉴别器,t1 和t2 时刻的相关值采样应该在同一数据比特时间区间内,但是初始捕获阶段接收机不知道数据跳变的边界,所以本文采用二象限反正切鉴别器,有效防止了因数据跳变引起的频率鉴别误差,其表达式为:

3 相位鉴别器
PLL 通过复现卫星的准确相位和频率( 已变换到中频) 来完成载波剥离功能。因为CoSTas 锁相环对数据调制不敏感,所以本文采用Costas 锁相环,常用的鉴别器如表1 所示。
表1 常用Costas 环鉴别器
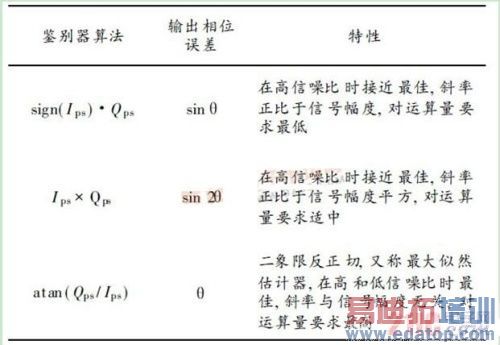
因为二象限反正切鉴别器的输入误差范围在±90°区间上保持线性,所以本文采用二象限反正切鉴别器。
4 载波环滤波器
环路滤波器的作用是降低噪声,以便对原始信号进行精确估计,其阶数和带宽决定了它对信号的动态响应。为了使接收机适应高动态环境,本文采用二阶FLL 辅助三阶PLL 的环路滤波器,其原理框图见图2。
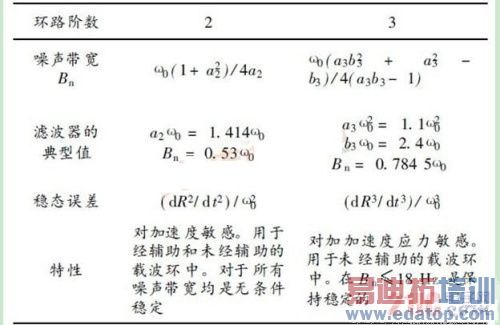
环路滤波器的特性见表2。
接收机完成捕获、码跟踪后进入载波跟踪模块,由于此时多普勒频移较大,所以FLL 与PLL 同时工作,给环路滤波器输入频差和相差,当频率误差减小到PLL 可以容忍的范围时,将环路滤波器的输入频差设为零,即环路转变为纯PLL 跟踪模式。
表2 环路滤波器特性
由图2,环路滤波器的表达式为:
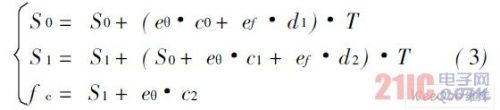
根据接收机的使用环境,确定环路滤波器的噪声带宽 Bnf 和B np ,就可以由表2 确定滤波器系数。注意,FLL 向滤波器的系数插入点与PLL 相比要提前一个积分器,这是因为FLL 误差的单位是Hz,而PLL 误差的单位是相位单位。
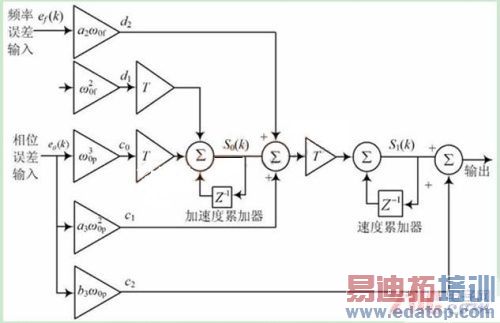
图2 二阶FLL 辅助三阶PLL 滤波器
5 仿真结果及分析
5. 1 FLL 鉴别器特性
采用预检测积分时间T= 1 ms,在有数据调制的情况下( ±1 跳变/ ms) ,输入频率误差范围为± 400 Hz,对四象限反正切( atan2) 和二象限反正切( atan) 鉴别器进行仿真,结果见图3。由图3 可以看出,atan2 鉴别算法已不能鉴别出真正的频率误差,而atan 可以鉴别的范围达到±250 H z。

图3 有数据调制下的FLL 鉴频特性
5. 2 PLL 鉴别器特性
采用预检测积分时间T= 1 ms,输入相位误差范围为±180°,对表1 的三种相位鉴别器进行仿真,结果见图4。通过图4 可看出,只有二象限反正切( atan) 鉴别器在±90°的范围内保持线性,且斜率与信号幅度无关。
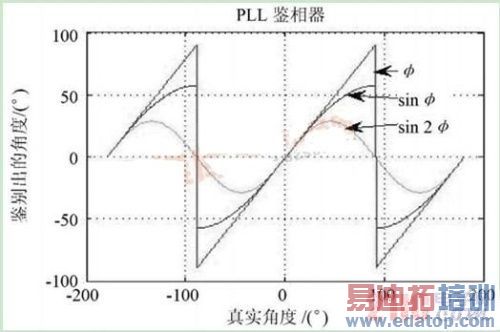
图4 PLL 鉴相特性
5. 3 载波跟踪环仿真及分析
根据5. 1 和5. 2 节的仿真结果,FLL 选择二象限反正切鉴别器,PLL 也选择二象限反正切鉴别器。将鉴别器结果送入图2 所示的环路滤波器,滤波结果送给数控振荡器,形成图1 所示的闭环模式。接收机捕获时采用时域和频域二维搜索算法,根据FLL 鉴别器的频率鉴别范围,设定频率搜索步长为500 Hz。接收机速度为500 m/ s,加速度为10g 时的仿真结果如图5 所示。由图5 可以看出,载波跟踪环路可以快速、准确地跟踪频率的变化,在3~ 4 s 即可达到锁定状态。
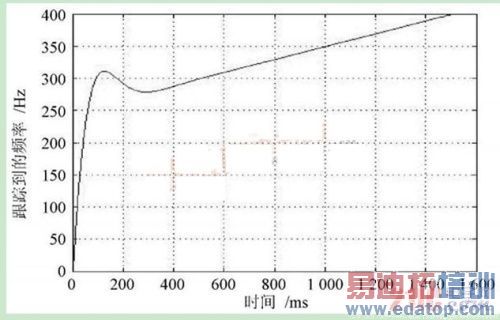
图5 跟踪到的频率变化曲线
6 结 语
采用了二阶锁频环辅助三阶锁相环的载波跟踪环路。通过仿真可以看出,选用的鉴别器鉴别范围大,精度高,且对数据跳变不敏感。由鉴别器、环路滤波器和数控振荡器形成闭环回路,在高动态环境下,环路锁定时间短,载波测量精度高,具有一定的实用价值。
如何成为一名优秀的射频工程师,敬请关注: 射频工程师养成培训
上一篇:大功率无线路由器的微波器件选型
下一篇:千兆微波推出宽频微波功率放大仪器
