- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
雷达电磁波三维探测范围可视化仿真
录入:edatop.com 点击:
0 引言
虚拟战场生成是目前研究的一个热点,其利用虚拟现实技术构建沉浸式的战场环境,为指挥员提供强大的辅助决策功能。虚拟战场包括自 然环境和电磁环境2个部分,将非可视化的电磁环境可视化是构建虚拟战场难点之一。雷达电磁波是电磁环境的主要构成,其在传播过程中受到复杂自然环境的影 响,同时也受到复杂电子干扰环境的影响,电磁波能量在空间的分布极为复杂。目前由美国海军发展的高级传播模型(Advanced Propagation Model,APM)综合考虑了复杂地形和复杂大气环境的影响,能够快速准确地估计出雷达电磁波传播损失情况。但是APM模型未考虑受到电子干扰时的情 形,且局限于二维垂直面上的传播计算。
实际运用中,必须对APM模型进行改进。文献利用APM模型实现了雷达传播信息的圆柱体绘制。圆柱 体绘制视觉效果好,但每次改变视角都重新计算全部数据,因此对硬件要求较高。文献提出虚拟3D策略来构造三维雷达的作用范围。虚拟3D策略绘制速度快,实 时性好,但随着电磁波传播距离的增大,数据误差难以控制。改进了APM模型,使得APM模型更适用于电子干扰环境;改进了可视化方法,有效控制电磁传播距 离较远时的数据误差。视觉化工具函数库(Visualization Toolkit,VTK)是一个开源、跨平台软件包。它是在三维函数库OpenGL的基础上采用面向对象的设计方法发展起来的,具有强大的三维图形功能。 充分挖掘其强大的数据集对象功能,实现了对大范围高密度的电磁环境实时可视化。
1 雷达垂直探测范圈
1.1 雷达探测垂直面数据获取
高 级传播模型(APM)是射线光学和抛物方程理论的混合模型,它克服了抛物方程模型计算量大的缺点,将传输区域分为4个部分:平坦地面 FE(FlatEarth)、射线光学RO(Ray Optics)、抛物方程PE(Parabolic Equation)和扩展光学XO(Extended Optics),如图1所示。APM模型已经考虑了地形、地面类型、大气折射、大气衰减等诸多自然环境因素,只需根据各地自然环境的不同进行建模,模型在 精确度和计算效率方面实现了很好的权衡,是一种全新的、高效的电磁波传播模型。基于此,选用APM模型来计算各个方位角垂直面上的传播因子F和传播损失 L。更多关于APM的资料见文献。传播因子F的定义为空间某点的实际电场强度E与在自由空间传播条件下天线方向图最大方向对准该点时产生的场强E0之比。 传播损失L是传播因子F的函数。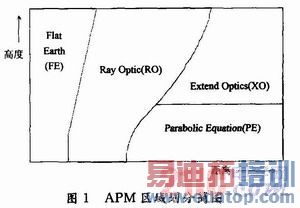
PE模型是APM的核心模型,其他为补充。PE采用分布傅里叶方法求解,其基本原理是沿着电磁波传播方向等间距不断递推求电场值。递推公式为:
式中:x,z分别表示距离和高度方向上的坐标值;M(z)为大气在不同高度上的折射系数;k0是自由空间波数;f和f-1表示傅里叶和逆傅里叶变换;p是转换常数,p=k0sinθ;θ是电磁波传播方向与水平面的夹角。
1.2 受到干扰时雷达探测垂直面数据修正
1.2.1 从传播损失到探测范围
以功率形式表示的最基本的雷达方程为:
式 中:Pt,Pr分别为雷达发射和接收功率;Gt,Gr分别为雷达发射和接收增益;λ为波长;σ为雷达目标截面积;R为传播距离;Ls为系统损失;L为传播 损失。从式(4)可以看出,当发射功率和雷达目标反射截面积一定时,雷达接收功率和传播损失有确定的关系。当雷达接收功率大于雷达最小可检测功率 Simin时,即可探测到目标。雷达最小可检测功率Simin是雷达系统在一定发现概率下的固有性能。于是,可以通过传播损失值直接确定雷达的探测范围, 把Simin作为阈值,L≤Simin的区域为探测区域,L>Simin的区域为盲区。
1.2.2 考虑电子干扰时对APM模型的改进
由 APM模型可得到雷达电磁波二维垂直面上的传播损失,如图2所示。APM模型未考虑电子干扰的情况。实际上,由于电磁波传播的独立性,电子干扰并不影响雷 达传播损失,电子干扰是一种通过强干扰信号进入雷达接收机,从而降低雷达信噪比,达到降低雷达的威力和精度,使其不能正常工作的一种干扰方式。若把电子干 扰降低的雷达信噪比等效到雷达传播损失值上,就可以极大地简化计算过程。 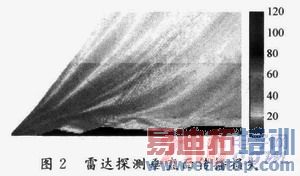
设干扰机主瓣方向与雷达主瓣方向的夹角为θ,等效的传播损失经验公式为:
式中:θ3dB为半功率波束宽度。
2 三维可视化方法
2.1 圆柱等值面提取
利 用VTK软件包实现数据场的可视化,VTK使用的是Pipeline应用程序结构,封装成一系列定义清晰,易于扩展的类,具体流程如图3所示。为获取整个 体数据场,可由APM模型分别计算以雷达为原点的各个方位角垂直面上的传播损失,然后将各个垂直剖面联合起来,形成圆柱坐标形式的体数据,如图4所示。提 取圆柱体数据场在特定阈值时的等值面即可形成雷达探测范围。为了简化,假设各方位角垂直面上的地形和大气状况相同。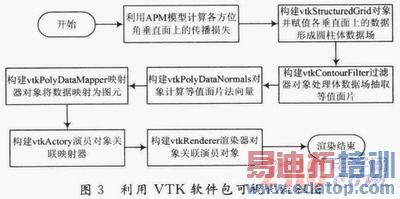
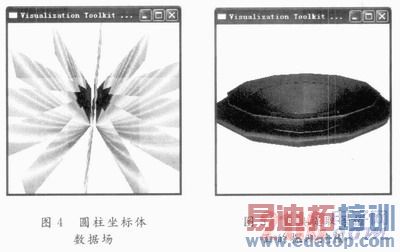
图 5是对圆柱体数据提取等值面的效果,实现了雷达探测范围的可视化。但是从中也能明显看出从圆柱体数据直接提取等值面的缺陷,圆柱体数据场数据密度不一致, 内密外疏,如图6所示。这样会造成2个问题,一是在探测范围的外边界数据不光滑,误差较大,为了减小误差,需要更多的剖分面,体数据量急剧增加,增大计算 负荷;二是探测范围内部数据场密度过大,数据冗余,计算出的等值面片比计算机像素还要小,面片退化为点,浪费计算资源。
2.2 同心圆柱环拼接
为 了圆柱体数据场密度不一致问题,提出了一种同心圆柱环拼接算法。首先将圆柱体数据沿距离方向等分为圆柱环,然后从内向外依次填充数据,使得外环的数据密度 不小于内环的数据密度,最后将各圆柱体环数据可视化拼接,即可实现对探测范围的可视化。本算法的关键是利用APM模型的递推算法,将初始场外推,减少递推 步数,如图7所示。利用已经算出a点和b点的电场值,插值计算出中点c的电场值,把c的电场值作为初始值带入APM模型求解后面的数据。这样就避免了上面 提出的2个问题。若a与b之间的地形变化剧烈,这种方法也可能带来较大的误差。这时,应以雷达原点为初始场,计算雷达至c点的电场强度。在工程中,充分考 虑雷达周围的地形情况可避免大量的重复运算,如若雷达至a,b和c点的地形一样,或误差很小,那么可以使用任意一点的电场值代替其他点的电场值。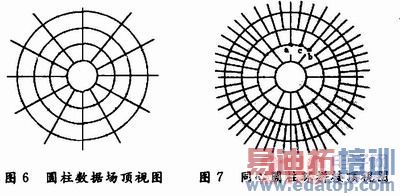
3 结果与分析
设 发射频率为1 GHz,天线高度为25 m,采用水平极化方式,地面绝对湿度为0.1 g/m3,地表空气温度为15℃,地面类型为中等干燥地面。利用VTK软件包和同心圆柱环拼接方法,雷达探测范围仿真的结果如图8所示。若加入电子干扰, 设雷达的半功率波束宽度为30℃,探测范围仿真结果如图9所示。比较图8、图9和图5,利用同心圆柱拼接算法,探测边界光滑性得到明显的改善。绘制完毕 后,用鼠标旋转可以改变视角,速率可满足实时性要求。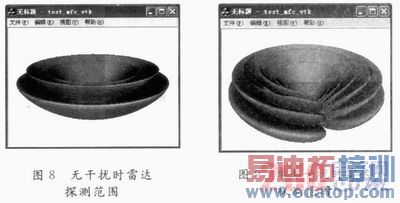
在实际的战场环境中,电磁环境非常复杂,除了地形地质、实时变化大气环境,雷达探测范围还与目标散射截面积有关。构建真正可以提供辅助决策功能的虚拟战场平台,还需进行大量的研究与探索,将电磁环境和地理环境充分融合。
如何成为一名优秀的射频工程师,敬请关注: 射频工程师养成培训
上一篇:安捷伦宽频的光学波形分析方案
下一篇:无线充电技术的发展
