米勒补偿
录入:edatop.com 阅读:
在做两级运放的时候,由于增益要求很高,所以经常需要进行频率补偿,我想问下,这个补偿的电阻和电容大小怎么确定,一般在多大的范围内呢?
为什么增益要求高了需要频率补偿啊?razavi书上说是为了闭环的稳定性。
粗略的计算可以看看allen的第6章
有计算方法
如果没记错的话,电容一般根据工艺选择在pF量级,由于电容很占面积,所以对于集成电路越小越好,这也是使用Miller电容的原因,因为根据Miller定理,该电容在入口端的等效值是增大的。
至于那个nulling resistor,加入它的原因是Miller电容本身导致了右半平面的零点,影响稳定性,而这个nulling resistor需要把零点重新带回左平面。计算方法很简单,gm=1/(R+1/sC), 1/sC=1/gm-R<0, R>1/gm
gm为second stage的transconductance。
因为对于一个二阶运放,总的增益为G=gm1*Rout1*gm2*Rout2,如果增益很高,那么Rout1和Rout2都很大,这样,second pole的值有可能小于GBWP,而first pole的值也相对较高,我们说phase margin大于45度的系统才可以算为稳定系统,一般系统在60度左右,加入Miller电容后导致pole splitting,即低值更低,高值更高,所以当使用时,添加在外部的反馈电路要比加入Miller电容之前的情况更容易达到稳定系统的要求。
请问这个式子成立的原理是什么?
非常感谢您的解释,这让我也清楚了许多,谢谢^^
这要根据你的3db带宽的要求来确定w=1/RC
就是zero的计算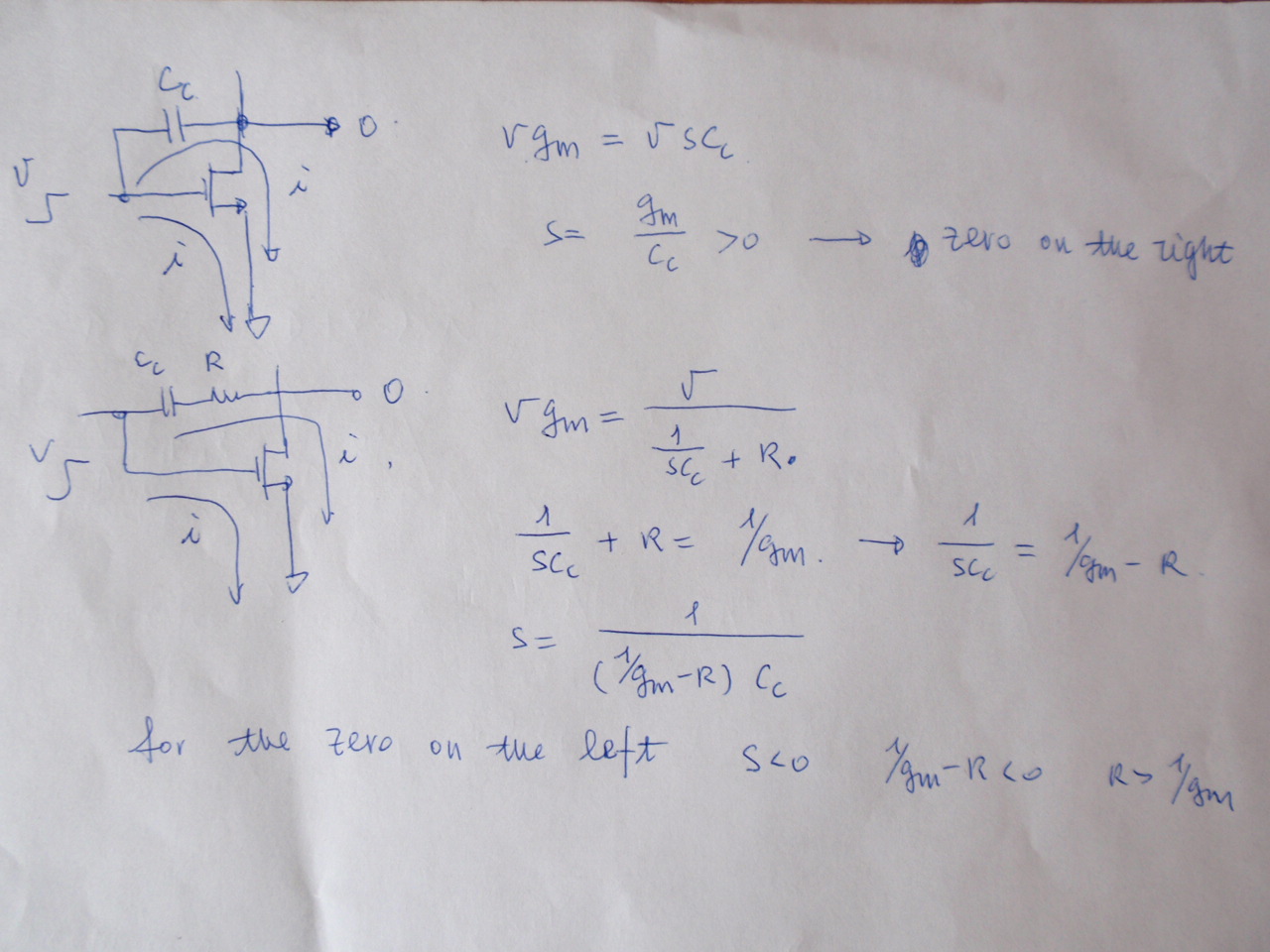
这次总算明白了,非常非常感谢!
学习了,极零点这块总弄不懂。
学习了。
谢谢,学习了
温故知新,谢谢了
感谢分享!
申明:网友回复良莠不齐,仅供参考。如需专业解答,请学习本站推出的微波射频专业培训课程。
上一篇:降压型DCDC中输出电流由哪些因素决定
下一篇:BBPD增益问题
