- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
PLC及PC与RFID识别读写器串行通讯的实现
录入:edatop.com 点击:
RFID的全称是Radio Frequency Identification,即射频识别,它利用无线电射频实现可编程控制器(PLC)或微机(PC)与标识间的数据传输, 从而实现非接触式目标识别与跟踪。
一个典型的RFID射频识别系统包括四部分:标识、天线、控制器和主机(PLC或PC),系统结构图见图1。
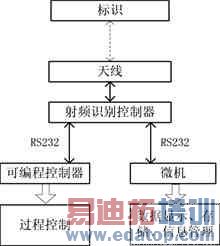
图1 RFID射频识别系统结构图
标识一般固定在跟踪识别对象上,如托盘、货架、小车、集装箱,在标识中可以存储一定字节的数据,用于记录识别对象的重要信息。当标识随识别对象移动时,标识就成为一个移动的数据载体。以RFID在计算机组装线上的应用为例,标识中可以记录机箱的类型(立式还是卧式)、所需配件及型号(主板、硬盘、CD-ROM等)、需要完成的工序等。又如在邮包的自动分拣和跟踪应用中,可以在标识中存储邮包的始发地、目的地、路由等信息。
天线的作用是通过无线电磁波从标识中读数据或写数据到标识中。天线形状大小各异,大的可以做成货仓出口的门或通道,小的可以小到1mm。
控制器用于控制天线与PLC或PC间的数据通信,有的控制器还带有数字量输入输出,可以直接用于控制。控制器与天线合称读写器。
PLC或PC根据读写器捕捉到的标识中的数据完成相应的过程控制,或进行数据分析、显示和存储。
本文即以具有代表性的美国EMS(Escort Memory Systems)公司的13.56MHz无源RFID射频识别读写器LRP830为例,介绍了PLC及PC与RFID读写器进行串行通讯,从而获取标识数据,用于控制或数据处理的具体实现方法。
2 RFID射频识别读写器的命令集及串行通讯协议
以LRP830读写器为例,LRP830是EMS 13.56MHz无源系列射频读写器中的一种,它的标识和天线可以在水下或高温腐蚀环境中正常工作,可以一次读写99个标识,最大读写距离63.5cm。它带有两个串口,一个DeviceNet接口,4个DI隔离输入,4个DI隔离输出,保护等级IP66,NEMA4封装,非常适合于在工业自动化中应用。
LRP830读写器上的串口是合在一起的,通过专用电缆可以分接出COM1和COM2两个串口,两个串口作用不同,COM1用作通讯口,从PLC或PC接收命令并返回响应数据, 可以配置为RS232、RS422或DeviceNet接口。COM2用于配置系统参数(如读写模式、波特率等)或下载系统升级程序。
LRP830可以与所有EMS的FastTrackTM系列无源标识结合使用,每个标识中可以存储48个字节的数据,另外还有8个字节用于存储只读的唯一的序列号(出厂前由厂方设定)。
LRP830提供了单标识读写命令集(见表1),多标识读写命令与此类似。
表1 单标识命令集

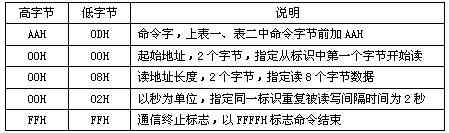
每种命令可以有三种通讯协议:ABxS 、ABxF 、ABx ASCII。表2 是ABxS通讯协议持续读单标识命令的一个例子,其它命令与此类似。
表2 ABxS协议持续读单标识命令举例
3 RFID读写器与PLC串行通讯
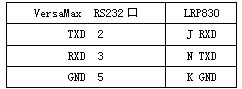
以EMS RFID读写器LRP830 与GE Fanuc VersaMax PLC的串行通讯为例。VersaMax PLC的RS232串口与LRP830的COM1接线对应关系见表3。
表3 VersaMax与LRP830读写器的串口接线对应关系
通过PLC控制RFID读写器读写标识数据的实现流程如图2所示。
图2 PLC读写RFID标识数据的程序结构框图

以下是具体实现时要注意的技术细节:
1) LRP830与VersaMax PLC的串口相连时,信号线要错线,即VersaMax RS232口的TXD/RXD要接LRP830 的COM1的RXD/TXD,LRP830与PC连接时则是直通的。
2) PLC使用串行I/O通讯协议与RFID读写器通讯。串口初始化、设置缓冲区、清除缓冲区、写串口、读串口状态等操作都是先通过一组BLKMOV WORD指令给COMMREQ的数据块赋值,然后执行COMMREQ指令完成的。例如,以下语句(见图3)通过RFID读写器写10个FF(46H)到标识中,从第一个字节写起。
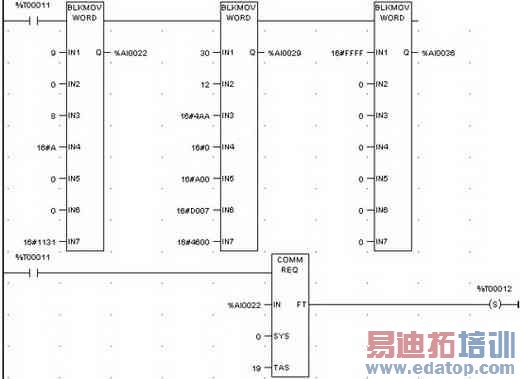
图3 PLC与RFID读写器串行通讯例程
3) 要注意PLC写标识数据只需要执行写串口命令就可以了,而PLC读标识数据的过程则包含两步:一是PLC执行写串口命令, 即写读标识命令到RFID读写器;二是PLC执行读串口命令,捕捉RFID读写器返回的数据。这是由于RFID读写器在接到读标识命令后,会返回读命令的响应信息到串口缓冲区,其中包含了读到的标识数据。
4) 使用ABxS协议时,要注意命令字的MSB和LSB的顺序问题。RFID读写器与PLC通讯时,要将读写器指令的MSB和LSB颠倒一下,即LSB在前,MSB在后。例如图3中,第二个BLKMOV WORD指令的第三个输入IN3应为16#4AA,而非16#AA04。
5) 利用读写器指示灯的变化辅助PLC程序调试。LRP830读写器的面板上有两排LED指示灯,其中,当“ANT”亮时,表示天线在执行读写操作;“COM1”亮时,表示串口1执行了写命令,“RF”亮时,表示有标识被读写且仍在读写范围内。
4 RFID读写器与PC串行通讯
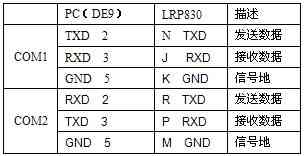
仍以EMS RFID读写器LRP830为例。与PC机相连时,LRP830的COM1/COM2与PC机的9针串口COM1/COM2的连接对应关系见表4。
表4 LRP830的串口与PC串口连接对应关系
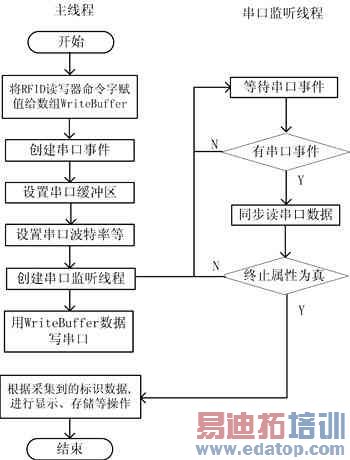
在PC机上开发串口通讯程序,可以使用现有的通讯控件(如VB的Mscomm),也可以使用高级编程语言结合Windows API实现。本文用Delphi 6在Windows2000环境中,应用多线程技术实现了PC与RFID读写器间的串行通信。使用Delphi的优点是,Delphi对许多Windows底层API函数作了封装,简化了程序代码。使用多线程的优点是,程序编写比较灵活,而且串口监听线程不影响主线程其它任务的执行。程序结构框图见图4。
RFID
在具体实现上述思路时,要注意以下技术细节:
1) 根据RFID读写器通讯协议的特点,读写器每执行一个主机发来的指令,无论是读标识还是写标识,都会返回一定字节的响应数据,用以确认命令已执行或返回标识中存储的数据。因此,主机读或写标识数据都需要先写(串口命令)后读(返回的串口数据)。
2) 为了使程序体现模块化的设计思想,易于调试和维护,可以把各种RFID命令预先存入命令数组中,而把主机对RFID串口的命令和捕捉RFID读写器命令响应编制成单独的子程序,在调用它之前,先调用命令字赋值子程序。
3) 对主线程的说明:在主线程中用CreateFile函数建立串口事件,设置缓冲区和通信参数,创建串口监听线程。用WriteFile写串口函数完成通过RFID读写器写数据到标识中。部分程序如下:
……
hcom := CreateFile(pchar(Whichcom), GENERIC_WRITE or GENERIC_READ,
0, 0, OPEN_ALWAYS, FILE_ATTRIBUTE_NORMAL, 0); //产生串口事件
setupcomm(hcom,TOTALBYTES,TOTALBYTES); //设置缓冲区
getcommstate(hcom,lpdcb);
lpdcb.BaudRate:=BAUDRATE; //波特率
lpdcb.StopBits := STOPBIT; //停止位
lpdcb.ByteSize := BYTESIZE; //每字节有几位
lpdcb.Parity :=PARITY; //奇偶校验
setcommstate(hcom,lpdcb); //设置串口
Mycomm := Tcomm2.Create(False); //创建串口监听线程
WriteFile(hcom, WriteBuffer,sizeof(WriteBuffer),lpBytesSent, 0);//写标识命令
……
4) 对串口监听线程的说明:
程序中用到的方法主要有Synchronize和Terminate。Synchronize是Delphi提供的一种安全调用线程的方法,它把线程的调用权交给了主线程,从而避免了线程间的冲突,这是一种最简单的线程间同步的方法,可以省去用其它语言编程时需要调用的多个Windows API 函数,例如createEvent(创建同步事件),Waitforsingleobject(等待同步事件置位),resetevent(同步事件复位),PostMessage(向主线程发送消息)等。用Delphi编写多线程通讯程序的优点是显而易见的。例如以下语句即可实现串口监听线程:
……
While (not Terminated) do //如果终止属性不为真
Begin
dwEvtM
ask:=0;
Wait := WaitCommEvent(hcom,dwevtmask,lpol); //等待串口事件
if Wait Then
begin
Synchronize(DataProcessing); //同步串口事件
end;
end;
上述程序一旦检测到串口事件,就调用DataProcessing方法读串口数据,并写入数组,供程序其它部分调用,另外还要检测何时退出线程,程序如下:
procedure Tmainform.DataProcessing
begin
clear := CLEARCOMMERROR(hcom,lperrors,@comms); //清除串口错误
if Clear Then
Begin //处理接收数据
ReadFile(hcom,ReadBuffer,Comms.cbInQue,LPReadNumber,0);
ReceBytes[I+ArrayOffset] := ReadBuffer[I];
//读串口缓冲区数据并写入数组
gameover := (ReceBytes[I+ArrayOffset-1]=Byte($FF))
and (ReceBytes[I+ArrayOffset]=Byte($FF)); //终止条件
if gameover then terminate; //退出线程
……
End;
End;
其中,Terminate将线程的Terminated属性设置为True。线程一旦检测到Terminated属性为True,就会结束线程,去执行Onterminate事件,在Onterminate事件中对采集到的RFID标识数据进行处理。由于RFID读写器的ABxS协议的命令响应的最后两个字节都是FF,所以可以将收到连续的两个FF作为终止线程的条件之一。
程序应用举例:
以持续读标识中所有48字节数据命令为例,在程序中用WriteBuffer数组保存该命令,对WriteBuffer数组的各个元素赋值如下:
WriteBuffer[0] := Byte($AA); WriteBuffer[1] := Byte($0D); //连续读标识命令字头
WriteBuffer[2] := Byte($00); WriteBuffer[3] := Byte($00); //从第一个字节开始读
WriteBuffer[4] := Byte($00); WriteBuffer[5] := Byte($30); //读48个字节数据
WriteBuffer[6] := Byte($00); WriteBuffer[7] := Byte($02); //延时2秒
WriteBuffer[8] := Byte($ff); WriteBuffer[9] := Byte($ff); //连续读标识命令字
执行持续读标识命令后,程序以WriteBuffer数组写串口,RFID读写器执行此命令,并返回响应数据(见图5)。
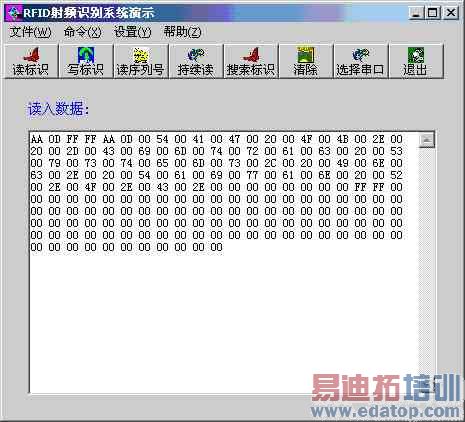
图5 持续读标识命令执行结果
从图5窗口中可以看到,前4个字节AA OD FF FF就是LRP830读写器对持续读命令的确认信息,然后是数据报文头AA OD和标识中48个字节的数据(每字节数据前加00),最后是数据报文尾FF FF。
5 结束语
本文介绍了可编程控制器及微机与RFID射频识别读写器进行串行通讯,从而获取标识中的数据的具体实现方法:PLC通过串行I/O通讯协议与RFID读写器实现串行通讯,PC通过Windows多线程技术与RFID读写器实现串行通讯。本文所述方法具有通用性,对于其它厂家的PLC和RFID系统也有一定的参考价值。RFID射频识别技术在我国工业自动化等领域的应用才刚刚开始,前景非常广阔。本文对于促进该技术的推广应用具有一定的积极意义。
