- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
通过校准改善MEMS 陀螺仪的精度和稳定性
录入:edatop.com 点击:
陀螺仪常用于要求高精度或稳定性的惯性导航或其它应用。为获得最高性能,这些应用所用的陀螺仪一般需要经过校准和外部温度补偿。本文介绍一种执行校准和温度补偿的方法。
校准如果陀螺仪用于温度稳定的环境中(或者如果它通过温度控制系统保持在恒定温度),单温度点校准就足够了。要进行单温度点校准,只要将陀螺仪放置于期望工作的温度(允许足够的预备时间)然后测量零位输出电压(V0)。
要确定比例因子(S),必须使用一些应用角速率的方法(一般是速率表)。例如,ADI 的ADXRS6xx 系列陀螺仪的非线性度很小,所以在一个旋转速率下测量输出(最好是在满量程附近)。比例因子可以通过以下公式计算
S = (VROTATING-V0)/旋转速率 (1)
得到V0 和S 的值之后
角速率 = (VGYRO-V0)/S (2)
温度补偿
如果陀螺仪将在一定温度范围内工作,那么就需要通过温度补偿来达到最佳性能。包含片内温度传感器的陀螺仪具备这种功能。
所需的校准信息与之前描述的单温度点方法类似,只是V0 和必须在不同的温度点进行测量。另外,必须记录温度传感器的输出(VT)。例如,由于ADXRS6xx 等陀螺仪的温度性能有些非线性,所以至少需要三个温度点用于温度补偿。使用更多的温度点可以提高精度和零位稳定性,但计算会变得更复杂。
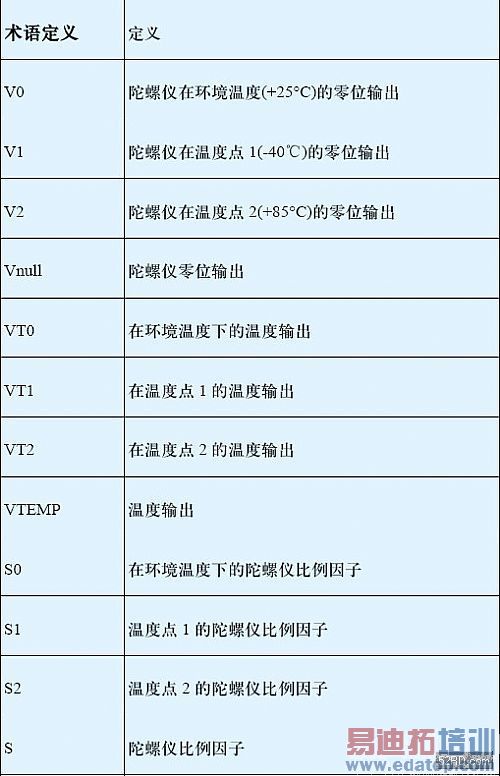
三点校准一旦测得温度和零位电压,在三个温度点上计算出比例因子,就能够将校准数据减化为校准系数,将校准系数用于通用公式就可以进行温度补偿。有几种方法可以实现这个过程,本文描述了一种任选的方法。通过如下公式定义陀螺仪输出参数:

其中:VP0 是温度传感器值环境温度(VT0)下的参数值。VP1 是温度传感器值(VT1)下相同的参数值。VP2 是在温度传感器值下相同的参数值。
系数a 和b 根据公式5 和6 计算。

一旦计算得到系数“a”和“b”,所有参数都可以用前面提到的一般方程表示。
示例在-40°C、+25°C 和+85°C 下测量给定的陀螺仪。测试结果如表1 所示。

这个陀螺仪的零位输出系数如方程7 和方程8 所示:

因此,在此例中,陀螺仪在任意温度的零位输出可以用方程9 表示:

同样地,比例因子系数为方程10 和方程11:


因此,这个陀螺仪在任意温度的比例因子可以用如下公式表示:

计算经过温度补偿的角速率一旦计算得到校准系数,就很容易通过下面的四步过程将陀螺仪的输出转换为以度/秒为单位的经过温度补偿的角速率数据。
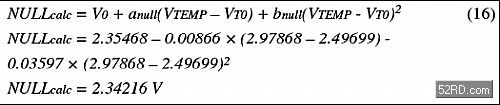
1.读取用电压表示的温度输出。用公式9 在实际温度下确定经过计算的零位。

2.读取用电压表示的速率输出值并用公式14 计算零位温度下经过修正的速率输出。

在器件温度下用公式12 计算比例因子。
用前面得到的信息,通过公式15 计算实际的角速率。
角速率= RATECORRECTED/S (15)
角速率对于之前举例的陀螺仪,在85°C 时,如果所测速率输出值为,那么实际的角速率按如下方法计算:
在85°C 时所计算的零位为:
在85°C 时经修正的速率电压值为:

在85°C 时计算出的比例因子为:

因此,用度/秒表示的角速率为:
角速率 = RATECORRECTED/S (19)
角速率 = 0.65784/0.0131951=49.85° (20)
结论
系列陀螺仪的温度补偿很简单。用简单的曲线拟合来计算校准系数,只有很少的校准信息需要存储在NVRAM 中,实际速率的计算只需用简单的公式。3 点温度校准修正的零位漂移可以达到良好的零位稳定性。用多于三个校准温度和更复杂的校准公式可以获得更好的零位稳定性。
作者:Harvey Weinberg,,电子工程学士,ADI 公司MEMS 和传感器技术部门惯性产品应用工程组组长,他已在此工作12 年。加入ADI 之前,他已具有10 年的过程控制仪器仪表电路和系统设计师工作经验。
