- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
数字信号控制器的加强型事件管理器
录入:edatop.com 点击:
以DSP为基础的数字信号控制器(DSC)执行电动马达相位控制时,其核心组件为事件管理器(Event Manager)。由于以DSP为基础的控制器应用范围正逐渐扩大到高效能电子产品的触发与控制等各种相关领域,因此这类事件管理器也需要一套全新架构。
新型事件管理器架构
以德州仪器(TI)基于DSP的24x和F28x数字信号控制器来看,事件管理器是由DSP的可程式逻辑电路构成,以便产生脉冲宽度调变(PWM)信号。这些事件管理器虽然是为了三相系统所设计,却拥有极大弹性,可以高效率应用在多相位或其它特殊需求应用(或许再加上一些软件)。事件管理器的功能已通过数个世代的处理器考验与测试,只需要进行一些细部调整即可。
针对新的应用需求,TI开发出一套称为加强型事件管理器(eEVM)的架构,将应用于F28x衍生系列的新元件,包括TMS320F2801、TMS320F2806和TMS320F2808控制器(TMS320F2801已实作部份功能)。加强型事件管理器的PWM产生方式与过去有很大差异。如图1所示,事件管理器总共有6个加强型PWM(EPWM)模组,每个都能产生两组独立的PWM信号。这6个模组拥有完全相同的功能和设定方式,因此每个模组都能独立产生中断要求、并在不同的时间点上触发模拟数字转换器。除此之外,这些模组还能同步操作以便在同样的时基上产生PWM信号。举例来说,若有两个完全相同的三相电动马达,就可以让EPWM1模组的时基与EPWM2和EPWM3同步,同时也让EPWM4的时基与EPWM5和EPWM6同步,以便使两个马达独立操作。另一种做法是让EPWM1的时基与另外五个模组同步,这样两个马达就能在同一时间启动操作。
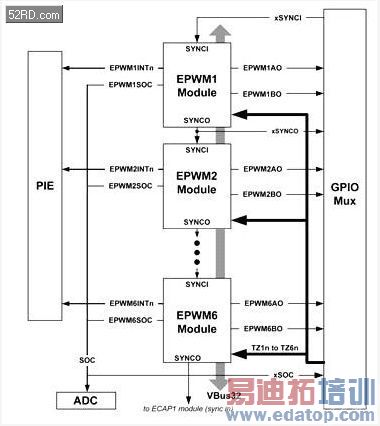
图1:F2808控制器的加强型事件管理器共有6个EPWM模组
EPWM模组的架构如图2所示,每个模组都包含数个次模组。如果要产生PWM信号,至少需要连接一个计时器和相关逻辑电路,以便在可程式设定的不同时间产生事件。16位元计数器位于时基模组(TB)会把时间资讯送到计数器比较模组(CC)和动作认可模组(Action Qualifier,AQ)。时基模组还包含逻辑电路以便与前面或后面的EPWM模组同步,至于相位移暂存器的重要性则会在稍后说明。计数器比较模组包含多个暂存器,系统可透过它们独立设定各个EPWM模组的两个PWM讯号(EPWMA和EPWMB)的脉冲宽度(负载週期)。PWM信号是由时基模组的计数器设定值决定,其中包括週期时间(最大计数值)和它的计数模式(正数计数、倒数计数,先正数再倒数)。完成这些设定后,就由动作认可模组产生PWM讯号,它会根据时基模组和计数器比较模组传来的资讯产生实际信号。设计人员还能设定动作认可模组的操作方式,让它在4个不同的时间点强迫相关接脚切换状态或是直接进入逻辑1或逻辑0状态,这4个时间点是:计数值等于0、计数值等于最大值、计数值等于比较暂存器A的值、以及计数值等于比较暂存器B的值。这两个比较暂存器还能产生PWM接脚事件。当然,该接脚也能透过动作认可模组的适当暂存器,经由软件设为特定的逻辑位准。另外,透过另一个模组、事件触发器和中断模组的协助,系统还能在这些时间点产生模拟数字转换器的触发信号或中断要求(或同时产生两者)。
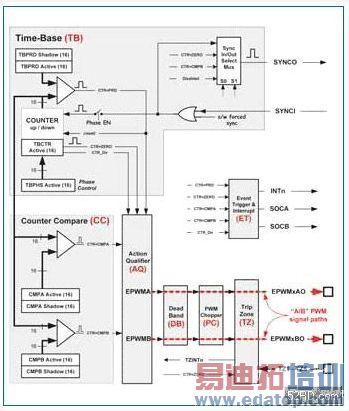
图2: EPWM模组的架构
利用逻辑电路产生PWM信号是为了尽可能将PWM的产生自动化,以便使CPU专心执行其它工作。这种做法相当成功,因为几乎所有的设定在硬件安装期间就能完成。在标准的马达控制应用里,由于相位电流供应是由脉冲宽度决定,而脉冲宽度则由现有的电流控制功能负责控制,所以只有计数器比较模组的比较暂存器需要在执行期间更新。
三个基本模组(时基,计数器比较,动作认可)及其独立弹性的设定选项可满足许多应用对功率输出级的要求,例如马达应用、不断电系统、直流电源转换器和其它类似应用。设计人员还能设定计数器比较模组和动作认可模组来产生停滞区(dead band),避免上端和下端输出电晶体同时导通而造成短路。
不仅如此,EPWM模组还包含专属的停滞区产生电路以及PWM截波器(PWM Chopper,PC)模组和触发区(Trip Zone)模组,它们都能由系统选择启动。
停滞区模组(DB)的位置就在动作认可模组之后,使用这个模组即可从EPWMA信号产生两个信号。第一个是原始信号,其上升边缘的升起时间可经由设定加以延迟(上升边缘延迟)。第二个信号同样可透过设定加以延迟,只不过这次是信号的下降边缘(下降边缘延迟)。设计人员现能选择这两个信号的相对动作方式,亦即它们是高电位作用/低电位作用或者互补高电位作用/互补低电位作用。如果系统脉冲为100MHz,之前也没有将脉冲分为多路传送(Split),那么这两种情形的实际延迟时间都能从0到10μs。此时,系统不会再使用EPWMB信号。
有些应用可能必须或希望将PWM信号的脉冲(亦即逻辑1的部份)进一步分割为多个单一脉冲(例如在某些变压器应用里),此时只要使用PWM截波器模组即可达成,它的位置就在停滞区模组的之后。截波器频率可以是1.6到12.5MHz之间的某个值,其脉冲宽度亦可固定为2.5%、25%、37.5% ... 或是87.5%。除此之外,设计人员还能单独设定截波器脉冲序列的第一个脉冲宽度,这种做法有许多用途,例如预先将电容充电至某个电压值。
触发区模组(TZ)是EPWM单元的最后一个选用模组,但它在多数应用的重要性却超过其它模组。触发区模组包含6个触发区或接脚,它们对所有的EPWM都相同,亦即每个触发接脚都能随意指定给任何一个EPWM模组。执行最后分析时,这个模组的主要功能是尽快对应用的错误或故障做出反应,同时关闭PWM信号或将一个或多个PWM接脚切换到高阻抗模式(单次触发模式)。这些工作由硬件控制,并会在信号边缘进入触发接脚后以最快速度完成。这类电路允许触发接脚所接受的上升边缘信号在某些状况下自我调整,例如当应用里某个点的电流超过特定临界值时。另一种做法是设定触发区模组,以便在某个点的电流超过临界值时,就利用触发接脚的信号边缘自动限制PWM信号的单一脉冲长度(个别周期模式)。这种做法可以连续执行,而且不需要软件介入;相较之下,系统若处于单次触发模式,通常就会在触发事件出现后停止工作,并由软件自行评估故障的严重程度。
模组同步如前所述是一项有趣的功能。时基模组除了标准的计数器暂存器外,还包含一个相位移暂存器,它能在收到同步信号时确保相位移暂存器值载入计数器。在三相马达控制之类的标准应用里,担任僕装置的EPWM模组会将它的相位移暂存器设为零。然而在直流电源转换器里,彼此之间却必须有120°相位差,因此担任主装置的EPWM模组会将它的相位移暂存器设为0°,第一个僕模组设为120°,第二个朴模组设为240°。
相较现有产品的事件管理器,加强型事件管理器是将撷取功能放到另一个专属模组。整体而言,它共有4个加强型撷取模组(ECAP),每个模组都有一个做为时基的32位元计时器、4个撷取暂存器和1只撷取接脚。这种简单直接的设计可以透过撷取接脚记录4个事件的时间,每个事件还能选择上升或下降边缘的触发方式。除此之外,设计人员现在还能设定ECAP模组,使暂存器的内容在记录后就保持不变或由新值取代最旧的值(环形缓冲区原理)。担任时基的32位元计时器也能採取相对时间模式(时间差模式),确保计时器在接脚每一次收到事件通知后就重设为零,这样就能从撷取暂存器直接取得两次事件的时间间隔。当然,它也支援传统的绝对时间模式,也就是逐渐增加计数器的值。
如果不必使用撷取功能,ECAP模组也很适合做为PWM信号产生器(辅助PWM)。在这种情形下,4个暂存器里的第一个暂存器会包含最大计数值(周期暂存器),第二个暂存器包含比较值(比较暂存器),另外两个则做为前两个的映像暂存器(shadow register)。ECAP和APWM模组可以彼此同步或是与EPWM模组同步。
上一篇:背投电视光学萤幕技术动向
下一篇:宽频ADC前端设计使用双变压器配置之考量
