- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
量测基础篇-感测器名词及其定义
录入:edatop.com 点击:
本文介绍关于感测器的相关名词与定义,包括敏感度、范围、精确度、解析度、准确度、偏移、线性、磁滞、反应时间、动态线性等,是进行量测作业不可不知的基本知识。
敏感度
感测器的敏感度定义为输出特性曲线的坡度(图1中的DY/DX),或是更常见的定义是能够产生可侦测之输出变化的物理参数的最小输入值。对部份感测器而言,敏感度的定义是产生标准化输出变动所需的输入参数变动。对其它的感测器而言,其定义则是要在输入参数中产生指定变动所需的输出电压变动。举例来说,标准的血压计敏感度为10 mV/V/mm Hg;也就是说,对于每一伏特的激发潜能(excitation potential)和每1 mm Hg的施加压力,都会有一个10-mV的输出电压。
敏感度误差
敏感度误差(如下方图1中的虚线曲线)是与特性曲线的理想坡度的差距。举例来说,以上所讨论的血压计可能实际的敏感度是7.8 mV/V/mm Hg,而非10 mV/V/mm Hg。
范围
感测器的范围是指可以测量之使用参数的最大值及最小值。举例来说,一个压力感测器的范围可能是-400至+400 mm Hg。此外,正范围和负范围往往不相等。举例来说,一具医疗血压计的规格是下限(真空)-50 mm Hg (图1中的Ymin )及上限(压力)+450 mm Hg(图1中的Ymax )。附带一提,这个规格很常见,而且也是当医师和护士试图使用动脉管来抽血,而没有留意系统中的液压开关时,有时候会破坏血压计的原因。一个小小的针管就可以在密闭系统中造成巨大的真空。
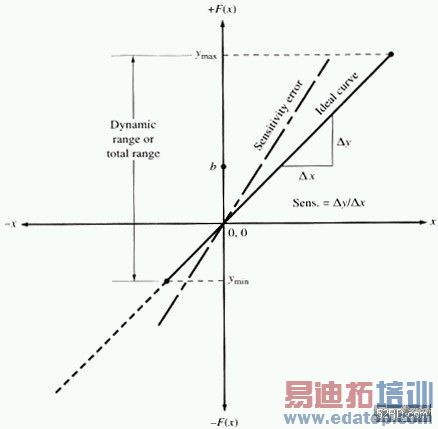
图1. 理想曲线和敏感度误差(来源:J.J. Carr, Sensors and Circuits Prentice Hall)
动态范围
动态范围是指感测器从最低范围到最高范围的总范围。也就是说,以图1为例,动态范围Rdyn = Ymax - l -Yminl 。
精确度
精确度的观念是指一项测量的重制程度。换句话说,如果多次测得同一个数值,那么理想的感测器应该每次都会输出同样的值。但是真正的感测器的输出值却是落在一个数值范围中,而此范围则以和实际的正确数字有某种相关的方式来界定。举例来说,假设对感测器施加150 mm Hg的压力。即使施加的压力从未变动,感测器的输出值也会有极大的变动。当真正的值和感测器的平均值之间的差距没有在一定的范围内时(例如正常分佈曲线的1-s范围),精确度就会发生一些细微的问题。
解析度
这项规格是指在输出信号中,能够侦测到的输入参数的最小增量。解析度可以表示为读数(或满刻度读数)的比例或以绝对单位表示。
准确度
感测器的准确度是指实际值(必须由一个主要或良好的次要标准来进行测量)和感测器输出的指示值之间的最大差异。同样地,准确度可以用比例或绝对单位来表示。
偏移
感测器的偏移(offset)误差定义为在输出应该是零(在某些特别的情况下,是实际输出值和指定输出值之间的差异)的情况下却存在的非零输出值。 就图1而言,如果特性曲线的敏感度坡度和理想曲线相同,但是在b处穿过Y轴(输出)而非在0处,即出现第一种状况。另一种偏移的形态则可见于图2的pH电极的特性曲线中。理想曲线只存在于一个温度下(通常是25°C),而实际曲线会因样本和电极的温度之不同,而介于最低温度和最高温度界限之间。

图2. 典型的pH电极特性曲线,显示其温度敏感度
(来源:J.J. Carr, Sensors and Circuits Prentice Hall)
线性
感测器的线性(Linearity)代表感测器的实际测得曲线与理想曲线的差异程度。图3以略为夸大的方式,显示理想(或最小平方吻合度,least squares fit)线和实际测得或校准线之间的关系(请注意,在大部份情况下,会使用静态曲线来判断线性,而这样做可能会与动态线性略有差异)。线性经常以非线性的百分比来说明,其定义为:
磁滞(hysteresis)
无论在那个方向上发生改变,感测器都应该能够跟上输入参数的变动;磁滞(hysteresis)就是这种属性的度量。图4显示标准的磁滞曲线。注意,改变从那个方向进行是有关系的。从较高值(图4中的P点)接近固定输入值(B点)所造成的现象会和从较低值(Q点或零)接近同一个值的现象不同。注意,输入值B可以用F(X)1、 F(X)2 或F(X)3 来代表,视前一个值为何而定──这显然是因为磁滞所造成的误差。
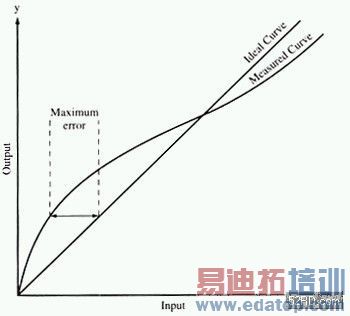
图3. 理想曲线与测得曲线,显示出线性误差(来源:J J Carr, Sensors and Circuits Prentice Hall)
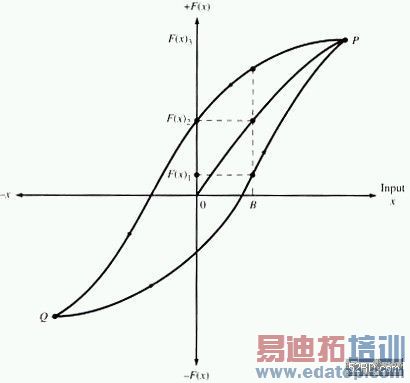
图4. 磁滞曲线(来源:J.J. Carr, Sensors and Circuits Prentice Hall)
反应时间
当输入参数发生变动时,感测器不会立刻改变输出状态。它必须经过一段时间才改变为新的状态,这段时间称为反应时间(response time)(图5中的T)。反应时间可以定义为感测器的输出值从先前的状态改变至最后的稳定值(介于正确新值的可接受范围内)所需要的时间。这个观念与系统的时间常数(time constant, T)有一点不同。时间常数可以用类似电容器透过电阻充电的方式来加以定义,而且通常低于反应时间。
图5的曲线显示两种类型的反应时间。在图5a中,曲线代表在输入参数发生陡削的上升步进函数(step-function)变动之后的反应时间。图5b显示的型态则是输入参数发生下降步进函数(step-function)变动之后的衰减时间(Td 与Tr不同,因为它们不一定相同)。
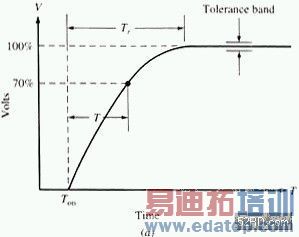
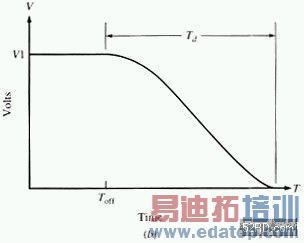
图5. (a)上升时间(Rise-time)的定义;(b)下降时间(fall-time)的定义
(来源:J.J. Carr, Sensors and Circuits Prentice Hall)
动态线性
感测器的动态线性(Dynamic Linearity)是指它随着输入参数快速变动的能力。在判断动态线性时,振幅扭曲的性质、相位扭曲的性质,以及反应时间都很重要。在一个低磁滞的系统中(最好使用此类系统),振幅反应可呈现为:
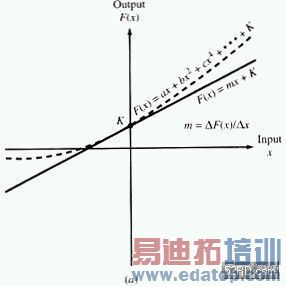
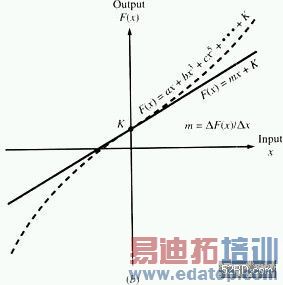
图6. 输出曲线与输入信号曲线,显示(a)平方误差;(b)立方误差
(来源:J.J. Carr, Sensors and Circuits Prentice Hall)


敏感度
感测器的敏感度定义为输出特性曲线的坡度(图1中的DY/DX),或是更常见的定义是能够产生可侦测之输出变化的物理参数的最小输入值。对部份感测器而言,敏感度的定义是产生标准化输出变动所需的输入参数变动。对其它的感测器而言,其定义则是要在输入参数中产生指定变动所需的输出电压变动。举例来说,标准的血压计敏感度为10 mV/V/mm Hg;也就是说,对于每一伏特的激发潜能(excitation potential)和每1 mm Hg的施加压力,都会有一个10-mV的输出电压。
敏感度误差
敏感度误差(如下方图1中的虚线曲线)是与特性曲线的理想坡度的差距。举例来说,以上所讨论的血压计可能实际的敏感度是7.8 mV/V/mm Hg,而非10 mV/V/mm Hg。
范围
感测器的范围是指可以测量之使用参数的最大值及最小值。举例来说,一个压力感测器的范围可能是-400至+400 mm Hg。此外,正范围和负范围往往不相等。举例来说,一具医疗血压计的规格是下限(真空)-50 mm Hg (图1中的Ymin )及上限(压力)+450 mm Hg(图1中的Ymax )。附带一提,这个规格很常见,而且也是当医师和护士试图使用动脉管来抽血,而没有留意系统中的液压开关时,有时候会破坏血压计的原因。一个小小的针管就可以在密闭系统中造成巨大的真空。
图1. 理想曲线和敏感度误差(来源:J.J. Carr, Sensors and Circuits Prentice Hall)
动态范围
动态范围是指感测器从最低范围到最高范围的总范围。也就是说,以图1为例,动态范围Rdyn = Ymax - l -Yminl 。
精确度
精确度的观念是指一项测量的重制程度。换句话说,如果多次测得同一个数值,那么理想的感测器应该每次都会输出同样的值。但是真正的感测器的输出值却是落在一个数值范围中,而此范围则以和实际的正确数字有某种相关的方式来界定。举例来说,假设对感测器施加150 mm Hg的压力。即使施加的压力从未变动,感测器的输出值也会有极大的变动。当真正的值和感测器的平均值之间的差距没有在一定的范围内时(例如正常分佈曲线的1-s范围),精确度就会发生一些细微的问题。
解析度
这项规格是指在输出信号中,能够侦测到的输入参数的最小增量。解析度可以表示为读数(或满刻度读数)的比例或以绝对单位表示。
准确度
感测器的准确度是指实际值(必须由一个主要或良好的次要标准来进行测量)和感测器输出的指示值之间的最大差异。同样地,准确度可以用比例或绝对单位来表示。
偏移
感测器的偏移(offset)误差定义为在输出应该是零(在某些特别的情况下,是实际输出值和指定输出值之间的差异)的情况下却存在的非零输出值。 就图1而言,如果特性曲线的敏感度坡度和理想曲线相同,但是在b处穿过Y轴(输出)而非在0处,即出现第一种状况。另一种偏移的形态则可见于图2的pH电极的特性曲线中。理想曲线只存在于一个温度下(通常是25°C),而实际曲线会因样本和电极的温度之不同,而介于最低温度和最高温度界限之间。
图2. 典型的pH电极特性曲线,显示其温度敏感度
(来源:J.J. Carr, Sensors and Circuits Prentice Hall)
线性
感测器的线性(Linearity)代表感测器的实际测得曲线与理想曲线的差异程度。图3以略为夸大的方式,显示理想(或最小平方吻合度,least squares fit)线和实际测得或校准线之间的关系(请注意,在大部份情况下,会使用静态曲线来判断线性,而这样做可能会与动态线性略有差异)。线性经常以非线性的百分比来说明,其定义为:
其中
Nonlinearity (%)是非线性的百分比
Din(max) 是最大输入偏移
INf.s. 是最大、全标度输入(full-scale input)
等式6-1所定义的静态非线性往往受环境因素影响,包括温度、震动、声音杂讯程度,以及溼度。很重要的是要知道在那些情况下可以使用这些规格,而且若不符合这些情况,可能无法产生线性的线性变化。
磁滞(hysteresis)
无论在那个方向上发生改变,感测器都应该能够跟上输入参数的变动;磁滞(hysteresis)就是这种属性的度量。图4显示标准的磁滞曲线。注意,改变从那个方向进行是有关系的。从较高值(图4中的P点)接近固定输入值(B点)所造成的现象会和从较低值(Q点或零)接近同一个值的现象不同。注意,输入值B可以用F(X)1、 F(X)2 或F(X)3 来代表,视前一个值为何而定──这显然是因为磁滞所造成的误差。
图3. 理想曲线与测得曲线,显示出线性误差(来源:J J Carr, Sensors and Circuits Prentice Hall)
图4. 磁滞曲线(来源:J.J. Carr, Sensors and Circuits Prentice Hall)
反应时间
当输入参数发生变动时,感测器不会立刻改变输出状态。它必须经过一段时间才改变为新的状态,这段时间称为反应时间(response time)(图5中的T)。反应时间可以定义为感测器的输出值从先前的状态改变至最后的稳定值(介于正确新值的可接受范围内)所需要的时间。这个观念与系统的时间常数(time constant, T)有一点不同。时间常数可以用类似电容器透过电阻充电的方式来加以定义,而且通常低于反应时间。
图5的曲线显示两种类型的反应时间。在图5a中,曲线代表在输入参数发生陡削的上升步进函数(step-function)变动之后的反应时间。图5b显示的型态则是输入参数发生下降步进函数(step-function)变动之后的衰减时间(Td 与Tr不同,因为它们不一定相同)。
图5. (a)上升时间(Rise-time)的定义;(b)下降时间(fall-time)的定义
(来源:J.J. Carr, Sensors and Circuits Prentice Hall)
动态线性
感测器的动态线性(Dynamic Linearity)是指它随着输入参数快速变动的能力。在判断动态线性时,振幅扭曲的性质、相位扭曲的性质,以及反应时间都很重要。在一个低磁滞的系统中(最好使用此类系统),振幅反应可呈现为:
在等式6-2中,F(X)是输出信号,而X代表输入参数及其谐波,K则是偏移常数(若有的话)。当感测器活动所产生的误差谐波落在与输入参数的动态行为所产生的自然谐波相同的频带中时,谐波就变得格外重要。所有的连续波都由一个基本正弦波及其谐波的傅立叶级数(Fourier series)来代表。在任何非正弦曲线的波形(包括物理参数随着时间产生的变动)中,谐波显示(Harmonics present)会受到感测器的行为影响。
图6. 输出曲线与输入信号曲线,显示(a)平方误差;(b)立方误差
(来源:J.J. Carr, Sensors and Circuits Prentice Hall)
校准曲线(图6)的非线性本质说明有那些谐波的存在。在图6a中,校准曲线(虚线)是不对称的,因此只有单谐波部分 存在。假设理想曲线的型态是F(x) = mx + K,则等式6-2的对称状况是:
在另一种校准曲线中(图6b),指示值对称于理想的mx + K曲线。在这种情况下,F(X) = -F(-X),而等式6-2的形式是:
上一篇:液晶电视用影像处理晶片的设计
下一篇:TPMS压力感应信号调节解决方案
