- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于DSP和FPGA的导航计算机系统设计
录入:edatop.com 点击:
摘要:为提高导航的精度和实时性,设计了基于DSP和FPGA的导航计算机模块,成功实现了低成本、小型化的捷联惯性导航系统。通过描述硬件的设计原理和软件的框架及流程,简要介绍了系统的设计和实现方法。经验证,该系统达到了导航定位的性能和精度要求,姿态、位置和速度等参数可以有效融合多传感器的导航信息,能满足导航计算机在处理能力、体积、功耗和适应性等方面的要求。
关键词:导航计算机;DSP;FPGA;导航定位
0 引言
惯性导航系统是随惯性传感器(陀螺仪和加速度计)技术的发展而发展起来的一门导航技术,由于具有完全自主,不受任何干扰,隐蔽性强,输出信息量大,输出信息实时性强等优点,在军事领域和民用领域都得到了广泛的应用,已被许多机载设备选为标准导航设备。特别是现代战争所面临的电磁环境日益复杂,对惯性导航技术的依赖和要求也越来越高,惯性导航技术已经成为现代高科技战争中一项重要支撑技术而受到各国的关注。为了保证飞机按照预定的航线进行飞行,对各种数据进行实时精确处理显得非常关键,因此研制具有可靠性高,运算精度高,性能先进等特点的新一代导航计算机已成为必然。
1 导航计算机系统组成
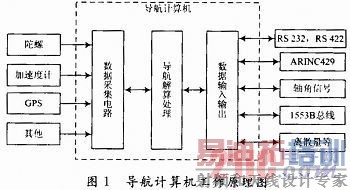
导航计算机是惯性导航系统的核心功能单元之一,配套应用于惯性导航系统的总体中。导航计算机采用嵌入式计算机设计技术、智能接口技术及高精度组合导航技术,配置高性能DSP处理器和大容量存储器,利用大规模现场可编程门阵列(FPGA)设计,使用集成软件开发环境开发程序实现高速板内总线对接口的高速访问。由处理器通过接收陀螺、加速度计、GPS等其他传感器的输入数据进行导航解算、误差补偿等运算处理,获得航向、俯仰、滚动角、三轴角速率、速度、经纬度、高度等导航所需的参数信息。
作为导航系统核心部件的导航计算机负责从数据采集电路获取导航原始数据,进行捷联导航算法处理,最后将解算得到的导航结果进行输出控制。系统工作原理如图1所示。
2 导航计算机硬件组成
导航计算机采用GPS卫星导航与惯性导航相结合,采用松耦合方式进行互联,在保证系统间信息交换能力的前提下考虑系统的组合性和灵活性。为提高系统的实时性、集成度和扩展性,硬件设计上采用DSP+FPGA的解决方案。
DSP芯片主要完成复杂的数学运算,包含误差补偿、初始对准和导航运算等;FPGA芯片完成所有外围接口,包括陀螺、加速度计的高速采样和I/O接口等各传感器信号的采集,通过信号处理电路送至处理器芯片进行运算处理,将解算到的惯性测量信息通过数据接口控制输出。导航计算机硬件组成如图2所示。

为保障系统具有大规模数据处理能力,同时具有实时性的特点,导航计算机的核心器件选用了TI公司推出的高速浮点处理器DSP芯片TMS 320C6713。作为导航计算机的核心控制部件,该芯片工作的主频为200 MHz,单指令执行周期为5 ns;定点浮点运算能力强大,运算速度能达到1 600 MIPS/1 200 MFLOPS。作为数据运算系统,TMS320C6713不仅保证了导航运算的速度和精度,同时丰富的系统应用外设及多种标准接口,方便导航计算机与外部传感器进行数据交互。快速的中断处理性能可保障导航计算机多个接口的传输速率。
为满足多个数据接口的数据传输需要,采用XILINX公司的现场可编程门阵列FPGA芯片XQ4013E4PG223M,设计完成了系统的复位功能、逻辑译码功能、外部接口管理和移位脉冲计数功能。FPGA芯片的使用,方便了功能电路的集成,在不增加硬件电路的情况下,通过模块化的VHDL设计,适应了导航功能电路的变化。通过采用基于VHDL的计数脉冲滤波、采样及自测试技术,提高了输入信号的采集精度,对提高整个激光捷联惯导系统的定位精度提供了支撑,实现了高精度、通用化和小型化。
惯性器件的输出信号采样频率决定了捷联解算的精度和速度。根据实时性要求,系统每1 ms采集一次陀螺脉冲和加速度计的数据,DSP芯片每10ms进行1次导航数据解算。因此选用高效的AD1674和OP200电路对加速度计采集到的信号进行模数转换,将采集到的0~5V电压信号转换为数字信号,存储于内部数据缓冲区内供DSP芯片进行数据处理。AD1674是12位A/D转换器,具有10 V参考输入,时钟输入和三态输出的微处理器接口,具有采样/保持功能,可对快速传输的交/直流信号进行直接转换,转换时间不大于15μs。AD1674芯片可以在两种模式下工作,全控制模式和独立模式,设计中选用独立工作模式,数据转换由R/C信号控制。
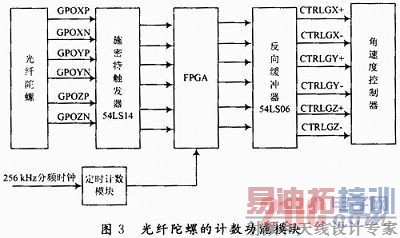
光纤陀螺输出信号是脉冲信号,x,y和z轴分别输出正反2路信号,信号为GPOXP,GPOXN,GPOYP,GPOYN,GPOZP,GPOZN。定时周期内正反信号脉冲个数的差和标度因数的积即为该轴向陀螺的角速度。光纤陀螺的计数功能模块如图3所示。
[p]
光纤陀螺的脉冲信号经信号调理电路进入计数器模块。计数器模块由5片定时器芯片8254实现14路16位计数器。5片芯片共用I/O地址空间,使能端长有效,输入时钟通过二选一电路来选择输入信号。6路脉冲信号工作,同时计数,确保光纤陀螺输入参数的准确性和实时性。脉冲信号计数和光纤陀螺之间在FPGA中以VHDL代码形式描述。
GPOXP<=DRP AND (NOT GPOX) AND C(0);
GPOXN<=DRP AND (NOT GPOX) AND C(1);
GPOYP<=DRP AND (NOT GPOY) AND C(2);
GPOYN<=DRP AND (NOT GPOY) AND C(3);
GPOZP<=DRP AND (NOT GPOZ) AND C(4);
GPOZN<=DRP AND (NOT GPOZ) AND C(5);
其中,GPOX,GPOY,GPOZ分别为8254芯片3个定时器/计数器输出信号;GPOXP,GPOXN,GPOYP,GPOYN,GPOZP,GPOZN分别经过5406反相输出后,依次对应CTRLGX+,CTRLGX-,CTRLGY+,CTRLGY-,CTRLGZ+,CTRLGZ-信号。
陀螺脉冲、加表脉冲和抖频脉冲是外部传感器的输入信号,是导航计算机的“眼睛”,计数要求最大计数频率为1MHz,计数精度为±1,导航计算机依靠解析这些信号进行定位,各导航系统的信息通信是否通畅、精确直接影响导航系统的性能,因此对这些信号的处理及可靠性要求非常高。如果这些电路出现故障,导航计算机则几乎无法使用;如果处理器采集的数据误差大,导航计算机的定位将不够准确,因此该部分电路是导航计算机的设计关键。针对这部分关键电路设计了专用测试电路。在系统加电初始化完成后,通过软件控制,硬件将输出标准的脉冲信号切换到传感器脉冲信号的输入端,然后进行数据采样,观察测试数据的准确性是否满足系统要求,实现了功能电路的自测试。
光纤陀螺的参数通过RS 422接口传递给处理器解算。RS 422电路由一片8252实现一路串行接口,通过MAX488芯片实现RS 422接口的转换,可实现最高1 Mb/s的数据传输速率。支持点对多的双向通信,数据信号采用全双工差分方式实现,信号的方式与接收在同一时刻进行而互不干扰,提高系统的响应速度。
ARINC429数据总线是为航空电子系统通信规定的航空工业标准,它为系统互联提供统一平台,担负着交联各个电子设备的重要责任。RS 429电路选用Harris公司的HSI3182和HSI3282,实现ARINC429数据接口的扩展,接收和发送中断均连接至系统中断控制器。传输的位速率为100 Kb/s,保障了各系统间的数字信息快速而可靠的传输。
导航计算机与上位机之间以RS 232串口形式进行数据交互,完成软件调试和串行通信(包括初始化参数的装载、导航功能的选择和导航功能的输出)。DSP芯片通过扩展异步串行接口,形成两路UART实现异步全双工串口通信,传输速率可达1.5 Mb/s。TTL电平和RS 232电平转换通过MAX232芯片实现。
3 导航计算机软件设计
导航计算机软件采用DSP集成开发环境CCS实现。CCS是TI公司推出的DSP开发环境,集成Sireulator和Emulator仿真器驱动程序。它包含每个TI器件的编译器、源代码编辑器、项目开发环境、调试器及许多其他功能,与C语言有良好的数据交互接口。CCS提供的单用户界面能使用户完成应用程序开发例程的每一步。CCS主要包括:CCS代码生成工具;CCS集成开发环境;DSP/BIOS插件程序和API;RTDX插件、主机接口和API。
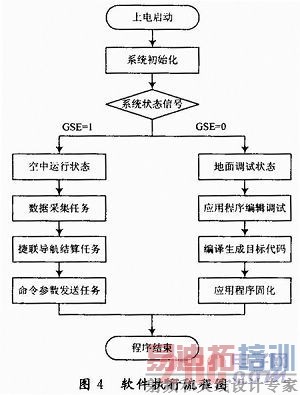
组合导航的软件算法解算过程通常采用卡尔曼滤波器实现,通过反复迭代实现。软件实现的功能分为4部分:系统初始化、数据采集任务、捷联导航结算任务和命令参数发送任务。DSP上电复位后进行系统初始化工作,配置各寄存器和内部资源的状态为确定的初始状态。如果监测到中断控制器的中断信号,首先读取RS 422和RS 429接口电路的数据,进行航向辅助的惯导数据解算。A/D转化结束产生中断,DSP从数据缓冲区读取到转换结果,得到飞行参数信息,并且将此时所有传感器的数据进行汇总分析,实现一次卡尔曼滤波。将得到的数据对捷联惯导的运算进行误差修正,得到系统最优的导航信息,通过串行口输出给上位计算机显示并对飞行器进行适当的调整。
软件成功执行了捷联算法,各个功能函数执行正确,并且导航结果有较好的精度。在系统加电后,导航计算机的引导程序首先读取系统状态信息。调试模式下可通过宿主机的开发调试工具CCS进行应用程序的编辑、编译、加载和调试,调试通过后使用编程工具将应用程序固化到系统FLASH中,从而提高了导航计算机的开发调试能力。软件的执行流程图如图4所示。
4 结语
激光捷联惯性导航系统是一种自主式导航基准系统,它成本低廉,结构简单,可靠性高,广泛应用在飞机、导弹、火箭、舰船、卫星等设备中。试验结果表明,系统的方案设计达到要求,导航精度符合设计要求。在硬件设计时充分考虑了系统的扩展,预留有串行口等扩展接口,可方便接入GPS接收机等外部导航设备,方便形成组合型导航系统,对导航系统小型化的研究和推广具有积极的意义。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
