- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于FPGA的惯导组合数据采集及控制系统设计
录入:edatop.com 点击:
摘要:利用FPGA并行处理的特点及其丰富的I/O接口,在此设计了一种针对捷联惯导系统的组合数据采集和控制系统。该系统能够实时采集惯导系统所需的IMU和GPS数据,能够根据需要产生任意占空比的PWM控制信号,该系统预留了丰富的I/O接口,方便和DSP等处理器进行无缝连接。测试结果表明,通过这种方法设计的系统,体积小,可靠性高、实时性强。
关键词:捷联惯导系统;FPGA;IMU;GPS;PWM
0 引言
捷联惯导系统是将惯性敏感器件陀螺仪和加速度计直接安装在运载体上,是不需要稳定平台的惯性导航系统。捷联惯导系统通过计算机内的姿态矩阵实时解析计算而得到一个数学平台,该平台起到在惯性空间始终保持所要求姿态的作用。由于捷联惯导的数学平台代替了稳定平台,这要求导航计算机必须具有很高的运算速度和精度。由于纯惯导系统的速度、位置信息误差随时间积累,随着导航技术的发展,惯性测量单元(IMU)提供的数据难以完成精度较高的长期导航任务。这就需要在长期导航任务中引入GPS进行辅助导航,但是GPS数据自主性差,发射的信号容易受到外部干扰,接收机数据更新频率低,单独使用难以满足导航实时要求。通过将IMU与GPS组合构成的导航系统可以克服两者单独工作的缺点,互相取长补短,更好地完成导航任务。IMU,GPS数据的两者融合正是通过IMU-GPS数据采集系统实现的。
根据惯性导航系统的特点,设计了一种基于FPGA实现IMU-GPS数据采集及PWM控制的系统,可以实现IMU数据和GPS数据的同时采集,可以根据需要产生任意占空比的PWM控制信号。
1 系统总体结构
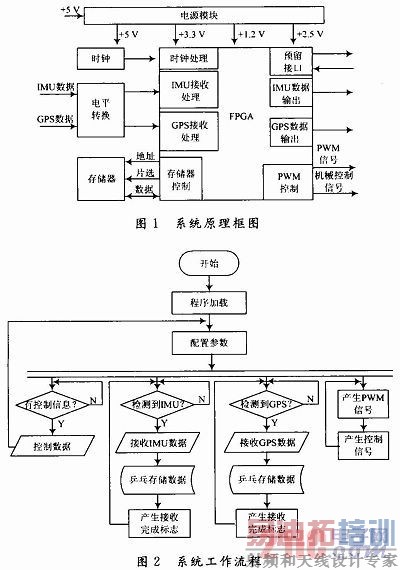
惯导和GPS组合导航系统要求既要具有高速实时的计算能力,也要具有丰富的外设接口,保证采样速度和精度。同时,根据整个系统小型化的考虑,惯导平台通常采用小容量PWM驱动装置,从而减小对加速度计、陀螺仪等惯性器件外部电磁环境的影响,保证其工作精度。FPGA具有丰富的I/O功能,还可以多个进程并行运行,能满足组合导航的要求。本文设计的捷联惯导数据采集与处理系统就采用FPGA作为核心处理芯片实现IMU-GPS数据采集处理和PWM控制,系统硬件结构如图1所示,系统的核心处理器FPGA选用Xilinx公司的XC3S400,它采用90 nm工艺,最大容量40万门,工作频率可达200 MHz。此外,系统还包括电源管理单元,程序和数据存储器,接口电平转换单元等部分组成。系统采用5 V供电,选用TI公司的TPS75003作为电源管理芯片,提供3.3V,2.5V和1.2V电压。
2 FPGA设计实现
该系统充分利用FPGA可并行运行的特点,利用软件编程在单片FPGA上并行实现IMU数据、GPS信息的接收处理、存储器和PWM控制,同时根据FPGA具有丰富的I/O接口特点,通过编程为DSP等微处理器的无缝接入预留接口。系统的工作流程如图2所示。 [p]
在系统设计中FPGA采用Xilinx公司的ISE软件进行编程,FPGA主要完成IMU,GPS数据的接收处理,PWM控制等功能。在系统中IMU,GPS数据通过电平转换电路连接至FPGA,FPGA通过不间断地检测IMU和GPS的数据头信息进行接收并进行相应处理,IMU,GPS数据接收的RTL实现图如图3所示。

在系统中,IMU数据以RS 422接口形式提供,信息速率为115 200 b/s,由帧头、陀螺角速度信息、加速度信息、陀螺温度信息、加速度温度信息,时间信息和校验和组成。在工作过程中,FPGA首先检测是否接收到IMU数据的开始信息即帧头,如果没有接收到就一直进行检测,如果收到就接收并进行相应的处理和存储。接收完1帧IMU数据后,FPGA对这些信息进行累加校验,并将计算得到校验结果和接收到的数据校验信息进行比较,如果校验信息一致则存储该帧信息,存储地址自动加1,如不一致则丢掉该帧信息,存储地址不变。信息接收完成后,产生接收完成标志位。
GPS数据由卫星导航接收机以RS 232接口的形式提供,能实现机动载体的实时高精度三维定位、三维测速、精确定时。GPS数据的接收及处理原理和IMU数据类似,不同之处在于需要检测信息头和需存储的数据长度不同。
IMU和GPS数据均采用乒乓存储的方式进行存储,乒乓存储空间以帧为单位,最小空间为2帧,此时IMU和GPS数据在2帧的存储空间中交替进行存储。乒乓存储空间的大小可以根据需要进行改变,存储空间的改变由导航计算机通过串口进行设置,更改时无需重新编写下载软件。
PWM控制器根据需要由导航计算机控制,可以产生电机控制信号和任意占空比的PWM信号。为避免初始化不定状态对输出控制信号对电机的影响,由导航计算机对PWM控制器的输出信号状态进行控制。
3 仿真验证
惯导数据采集与控制系统采用Xilinx公司的ISE软件进行设计和验证。IMU数据和GPS数据通过计算机模拟产生,PWM控制信号由导航计算机通过串口提供,仿真验证结果如图4所示。
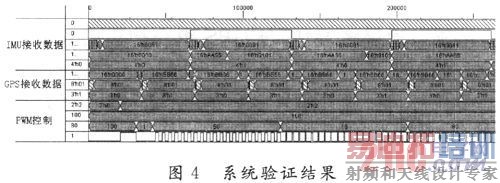
在该系统中,FPGA接收到IMU和GPS数据后存储在指定的存储空间内,IMU数据接收完成并校验通过后,产生接收完成标志0xAA55,GPS接收完成后产生0xAAAA标志,导航计算机通过读取这些完成标志来获取IMU和GPS数据。导航计算机读取完成后产生复位标志,此时,IMU和GPS数据的接收标志均复位为0x0101,仿真验证采用的IMU和GPS接收数据的乒乓存储空间为2帧。PWM信号的占空比由导航计算控制,验证采用的占空比分别为0,15%,50%,80%和100%。
4 结语
本文充分利用FPGA丰富的可编程资源,设计了基于FPGA的捷联惯导数据采集和控制系统,能够同时采集1MU数据和GPS数据,并能产生任意占空比的PWM控制信号。测试表明该系统能够保证惯导系统的运算速度和精度,且具有较丰富的外设接口,方便与导航计算机和外部传感器进行数据通信接口电路的设计,对惯导系统小型化及广泛应用具有实际意义。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:全液晶显示车载交互式信息系统方案
下一篇:小型无人机飞控计算机设计
射频和天线工程师培训课程详情>>
