- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于DSP的稳定平台设计
录入:edatop.com 点击:
摘要:为了消除海水运动对需要保持稳定姿态物体的影响,设计了两轴稳定平台。该稳定平台以TMS320F28335DSP为核心微处理器,采用了多传感器采集、伺服控制技术等;并架设了嵌入式操作系统μC/OS-Ⅱ来管理多任务稳定平台系统。实验结果表明,该两轴稳定平台在稳定性及动态性能上均能满足要求,起到了隔离海水运动的目的。
关键词:稳定平台;DSP;捷联惯性系统;μC/OS-Ⅱ
0 引言
在海面上要求保持物体水平状态时,由于海浪的影响,将导致物体的姿态随海浪的波动而变化。两轴稳定平台的设计正是基于隔离海水运动的目的,在平面内保持物体的水平状态。随着传感器技术、嵌入式控制技术等多项技术的应用,稳定平台也得到了广泛的发展。国外在稳定平台方面的发展已经趋向小型化、数字化、集成化。近年来我国对稳定跟踪平台的研究也开始增多,有多个科研单位对稳定跟踪平台开展研究,已经在国防、科研及民用各领域发挥了重要作用。该机载稳定平台通过嵌入式DSP系统的运算及控制,建立了测量与控制系统。以μC/OS-Ⅱ操作系统来管理多任务平台,从而实现了稳定平台的智能化、稳定性、快速和精确性。
1 系统原理
稳定平台的工作原理为通过姿态测量得出当前实时姿态信息,通过驱动伺服电机的转动,调节上平台面达到稳定姿态。当平台受海水运动所产生的力矩干扰,其姿态会发生变化,偏离稳定位置,通过姿态测量可以得出横滚角及俯仰角信息。姿态测量系统布局在稳定平台的上平台面,随着上平台面的运动而运动。受上平台面尺寸方面的限制,系统布局如图1所示。
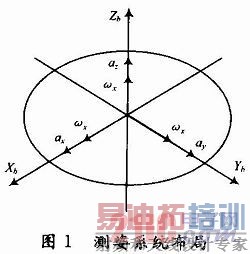
捷联惯性测量系统采用三陀螺、三加速度计组合的方式,构成了测姿系统的载体坐标系:其中ax,ay,az分别为三加速度计在载体坐标系三正交轴的加速度输出,ωx,ωy,ωz分别为三陀螺仪在载体坐标系三正交轴上的角速度输出。
传感器的布局设计构成了测姿系统的载体坐标系,而最终的平台姿态信息是相对于地理坐标系来说的,所以必须将测得的载体三轴向加速度和载体三轴向角速度转换到地理坐标系。
在上平台面初始静态条件下,三加速度计输出值与重力加速度之比的反余弦值即为载体的初始状态值,定义为俯仰角θ0和横滚角γ0。得出初始姿态之后,便根据三陀螺仪输出的三角速度ωx,ωy,ωz进行姿态解算。姿态矩阵解算采用最典型的四元数法。四元数法中,载体坐标系相对地理坐标系的转动可以看作是刚体定点转动,其基本表达式用来转动四元数Q来表示,即:
![]()
式中:q0,q1,q2,q3为转换系数;i,j,k为三轴转换向量。故要求载体坐标系到地理坐标系的转换矩阵,需要解下列四元数运动方程:
![]()
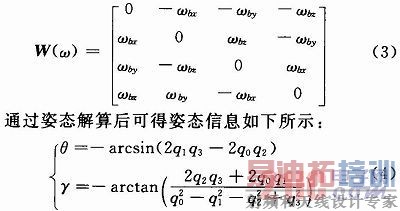
式中:Q为四元数矢量矩阵,用以描述载体坐标系相对于地理坐标系的姿态变化量;W(ω)为载体坐标系相对地理坐标系的转动角速度在载体坐标系上的投影,也就是前面解算出来的载体三个轴向上的角速率。
 [p]
[p]
2 控制系统硬件设计
考虑到稳定平台系统对数据处理方面的严格要求,核心微处理器选择TI公司的TMS320F28335数字信号处理器。TMS320F28335是TI公司到目前为止用于数字控制领域最好的DSP芯片,它具有浮点运算、集成度高、片上资源丰富、运算速度快等特点。平台系统硬件架构如图2所示。
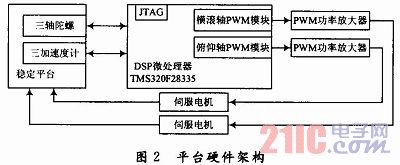
姿态测量系统采用三陀螺、三加速度计组合的方式,通过SPI接口与高速DSP处理器TMS320F28335相连接,用于在两者之间传输数字信息。其中共有4线相连,分别为:串行时钟线SCLK、主机输入/从机输出数据线MISO、主机输出/从机输人数据线MOSI和低电平有效的从机选择线SS。SPI为全双工通信,具有传输速率快,简单高效等优点。三陀螺、三加速度计均采用3.3 V电压供电,由系统电源提供。系统时钟采用30 MHz的外部晶体给CPU提供时钟,并通过使能片上PLL电路及控制寄存器的修改得到所需的时钟频率。
伺服控制系统采用TMS320F28335作为核心控制器。F28335有12个增强型脉宽调制模块,通过增强型脉宽调制模块ePWM的使用,从而将姿态测量系统测得的具体姿态角信息转换为不同占空比的方波。由于同时存在横滚角及俯仰角姿态信息,必须建立横滚伺服控制系统、俯仰伺服控制系统。横滚及俯仰方向上的方波经PWM功率放大器放大后,分别转换为横摇驱动驱动及纵摇驱动。两路驱动可采用不同频率的方波,控制伺服电机产生不同的转速,在一定时间内,将姿态角信息转换为滚珠丝杠相应的转动,从而达到平台稳定的目的。
3 系统软件设计
由于稳定平台采用并联方式驱动,因此结构在横摇、纵摇两个系统上采用并发执行的方式。对于简单多任务系统的稳定控制,可采用嵌入式操作系统μC/OS-Ⅱ对系统多任务进行管理和调度,以满足并发控制的要求。
3.1 μC/OS-Ⅱ
在嵌入式操作系统领域,μC/OS-Ⅱ以其源代码开放、研究免费、强实时性等特点被广泛应用。它是一种基于优先级的硬实时可剥夺型多任务内核,在多任务管理上表现卓越,而且在可移植性、裁剪等方面也具有优越的性能。已有成千上万的开发者把它成功地应用于各种系统,安全性和稳定性也已经得到认证,现已经通过美国FAA认证。因此将μC/OS-Ⅱ应用于多任务管理的稳定平台系统是非常合适的。
3.2 多任务管理
稳定平台系统主要执行以下任务:DSP硬件初始化、姿态测量、姿态数据处理、自适应PID解算、ePWM模块、横摇驱动和纵摇驱动。在μC/OS-Ⅱ操作系统管理下,任务管理分为:DSP硬件初始化、μC/OS-Ⅱ系统初始化、定时中断、横摇调整和纵摇调整。
操作系统第一步执行DSP硬件的初始化工作,包括设置系统的中断向量、初始化数字I/O、串行通信接口SPI、定时器模块等。完成后将开始操作系统的初始化,通过调用OSIint()完成操作系统的配置及数据的初始化。接着通过调用任务创建函数OSTaskCreat()函数,依次创建定时中断、横摇调整和纵摇调整3个任务。调用OSStart()最终启动多任务运行。
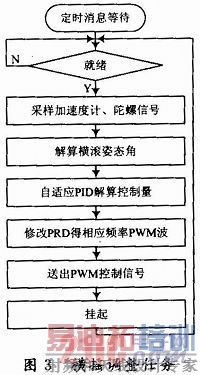
各任务优先级设定从高到低依次为:横摇调整、纵摇调整、定时中断,各任务间通过消息邮箱机制来实现各个任务间的同步。开始运行时,通过DSP定时器每50 ms一个周期的定时中断,使得定时中断任务就绪运行,该任务通过消息邮箱机制使得横摇调整及纵摇调整任务处于就绪态,并同时挂起等待下一个定时中断。横摇调整及纵摇调整主要完成的工作有姿态测量、姿态数据处理、自适应PID解算、ePWM模块、横摇驱动和纵摇驱动。横摇调整同纵摇调整相似,最后控制的相应驱动分别为横摇驱动、纵摇驱动。其中纵摇调整任务流程如图3所示:
[p]
横摇调整及纵摇调整在一个周期内完成相应的平台姿态调整之后,因等待定时中断发送的消息邮箱而挂起,待下一个消息到来之后再一次对平台姿态进行周期性的调整,保持平台在周期范围内的稳定。系统中数据采集与处理的部分关键代码如下所示。
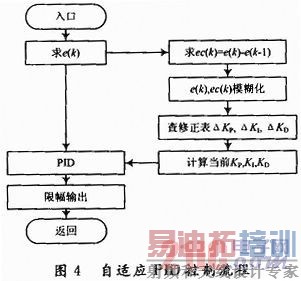
自适应PID控制程序实现流程图如图4所示。
4 结语
本文通过嵌入式控制系统的搭建,实现了稳定平台隔离海水运动的目的。该稳定平台以DSP TMS320F28335为核心微处理器,使用多传感器测量技术,对两自由度上实行模糊自适应PID控制,并通过架设嵌入式操作系统μC/OS-Ⅱ来管理并行横摇及纵摇任务,通过摇摆台的模拟实验,该稳定平台在稳定性上达到了预期的要求。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
