- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于单片机与CPLD的步进电机PWM驱动技术
录入:edatop.com 点击:
步进电动机是一种将数字信号转换为位移(或直线位移)的机电执行元件,每当输入一个脉冲时,转轴便转过一个固定的机械角度,他具有快速起停、精确步进、没有积累误差且能直接接收数字信号的特点,在数字控制系统中得到了广泛的应用。步进电机的运动性能和他的驱动器有密切的关系,驱动器的性能的优劣直接影响到步进电机运行的好坏。细分驱动方式可以减小步进电机的步矩角,提高分辨率,使电机运行更加平稳均匀,可以减小或消除低频振动。利用恒流和细分驱动技术可以大大提高步进电机的步矩分辨率,减小转矩波动,避免低频共振及降低运行噪声。通常的步进电机控制方法是采用CPU配合专用的步进电机驱动控制器来实现,存在成本高、不同种类的电动机必须要有相应的驱动控制器与之配对的问题。
1 混合式步进电机原理分析
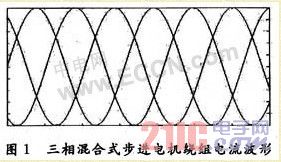
混合式步进电机通常只有整步和半步两种工作方式,当要求更小的步进角和更高的分辨率时,可通过改变定子绕组电流来实现。绕组电流给定采用经量化处理后的正弦波并分段切人,将绕组电流给定与反馈进行比较,并根据比较结果决定该相绕组的通断,最终得到正弦化的定子绕组电流。步进电机在高度细分运行时需要在电机内产生接近均匀的圆形旋转磁场各项绕组的合成磁势矢量,即各相绕组电流的合成矢量应在空间作幅度恒定的旋转运动,这就需要在各相绕组中通以正弦电流,三相混合式步进电机的三相绕组A,B和C在空间位置上相差2π/3,如图1所示。
给定三相绕组分别通过相位相差2π/3而幅度相同的正弦波电流,则合成的电流矢量在空间做幅值恒定的旋转运动,设三相电流分别为:
这是一个以3/2im为幅值、-α为幅角的逆时针旋转矢量。对于三相混合步进电机,三相绕组可以连接成星形或者三角形,按照电路的基本原理三相之和为0即:
![]()
通常对三相混合式步进电机进行驱动控制,需要产生相互独立的三相给定信号,然而按照上述分析,只需要产生两相绕组的给定信号,第三相绕组的给定信号可根据式(5)由其他两相求得。同样,只需要对相应的两相绕组的实际电流进行采样,第三相绕组的实际电流可根据式(5)求得。步进电机是脉冲电路驱动的伺服执行器件,在环行脉冲分配器的控制下,设输入一个控制脉冲,电机绕组的通电状态改变一次,三相步进电机在三相六拍的控制方式下,A,B,C三相的通电状态为:A-AB-B-BC-C-CA-A……。
2混合式步进电机系统构成与实现
基于AVR单片机和CPLD的三相混合式步进电动机控制系统的结构框图如图2所示。
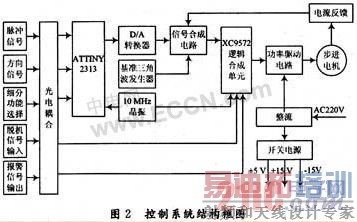
系统主要包括脉宽调制产生电路、逻辑合成电路、功率驱动电路和电源等4个部分。本设计采用的方法是:单片机采集到现场信号后计算出步进电机运转所需要的控制信息,经过参考电路与反馈信号发生相互作用,得到脉宽调制信号后再传给CPLD,CPLD把接收到的信息转换成步进电机实际的控制信号,即转动速度和转动方向,输出给电机的功率驱动电路模块。下面具体介绍脉宽调制产生电路和脉宽调制产生电路部分。
2.1 PWM信号产生
脉宽调制产生电路主要有单片机和外围的电路组成,如图3所示。
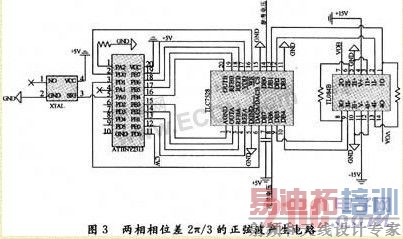
单片机主要完成转速、转向和细分数的设定。脉冲信号(CP)和方向信号(CW)均由外部控制电路输入,在脉宽调制产生电路中通过高速光电耦合器件和外部控制电路隔离,尽量减少由脉冲信号引入干扰的可能性。中心控制器件采用ATMEL公司的ATTINY2313单片机,ATTINY2313单片机使用AVRRISC结构,有32个8位通用工作寄存器,全静态工作,工作于20 MHz时性能高达20 MIPS。内部集成了128 B的系统内可编程E2PROM和128 B的片内SRAM,具有独立预分频器及比较模式的8位定时器/计数器,有两个全双工的串行通信口,集成看门狗复位电路,由于具有这些优点,使得驱动电路变得更加简洁和高效。在单片机的E2PROM内存储相应的sin(α)和sin(α+2π/3)波形的函数值,单片机复位后,首先读出PD3,PD4和PD5的值,来确定细分的大小,细分的数目可以任意设定,这使系统的通用性有了很大的提高。PD2口读入脉冲,PD8读入电动机的转向。波形发生器的工作原理:在输入步进脉冲CP和方向逻辑控制信号CW的同时,来判定细分的数目,E2PROM中有选择的读出需要的sin(α)和sin(α+2π/3)波形函数细分值,在经过D/A转换器TLC7528变成模拟量。由于TLC7528只有两路输出,所以只能得到两路模拟量,即在TL084B的第7(VOA)脚和14(VOB)脚得到相位差2π/3的正弦波。
由于需要的是三相相位差是2π/3的正弦波,可以用式(5)的方法,在VOA和VOB的输出端用一个加法器和一个反相器就得到第三相正弦波信号,式(6)为其简单的推导。
[p]
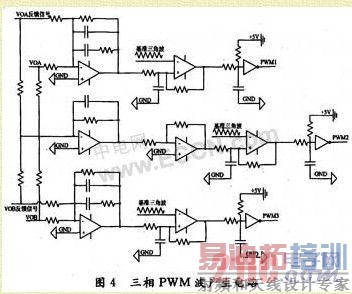
电流控制采用芯片TL084B实现。该芯片内部误差放大器将电流给定和电流反馈进行比较,再和基准三角波进行作用,经过电流调节后输出PWM信号,如图4所示,输出端得到脉宽调制信号。
2.2功率驱动电路
功率驱动电路采用三菱公司的IPM功率模块PS21564。PS21564是专用的电机控制器,适用于三相步进电机控制。他内部有三个相互独立的高低端输出通道,可以驱动工作电压不高于600 V的MOSFET和IGBT。他自身的工作电源电压范围13.5~16.5 V,输出驱动信号电压为20 V,输出最大正向峰值电流为30 A,他的输出驱动信号的最小上升时间为600 ns,最小下降时间为300 ns,可以在较高的频率下工作。通过外接采样电阻,当被驱动器件过流时,内部的过流保护电路就会封锁输出,从而保护功率器件不被损坏。应用HVIC实现集成电平转移,高电平导通逻辑,可与DSP/MCU接口兼容。智能IPM功率模块内置短路、欠压保护电路,输入信号端内置下拉电阻,外部无须再下拉电阻,热阻低,易于散热,2 500 V绝缘耐压,驱动电路如图5所示。
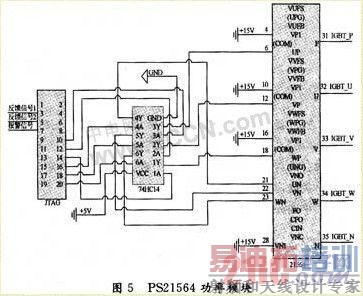
信号在CPLD内转化为PS21564所需要的六路桥,经74HC14反相器输入到PS21564,处理转换成U,V,W来驱动电机。FO引脚为故障输出,当为低电平时反馈给CPLD报警信号,CPLD收到信号后,关断u_down,u_up,v_down,v_up,w_down,w_up,停止信号的传送。
3结 语
利用本文设计的驱动器带动90BYG306三相混合步进电机进行试验,三相绕组用三角形接法,采用交流伺服控制原理,在控制方式上增加了全数字式电流环控制,三相正弦电流驱动输出,使三相混合式步进电机低速无爬行、无共振区、噪音小。该系统具备细分和半流功能,多种细分选择,最小步矩角可设置为0.036°。采用细分驱动后扭矩波动大大减小,从而消除了低频振荡对系统的影响,同时降低了高频失步对系统的影响。单片机程序由ICCAVR编写,复杂可编程逻辑器件程序由ISE 9.1i编写。由于步矩角减小电机分辨率高,波形输出稳定,电机运行更平滑,噪声更小电机驱动平稳。另外驱动电路具备短路、过压、欠压、过热等保护功能,可靠性高.
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
