- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
锂离子动力电池组的监测系统设计
录入:edatop.com 点击:
摘要:动力电池是机器人系统的重要组成部分,本课题主要研究锂离子动力电池组的监测系统,该系统是基于AVR 单片机开发的,可对蓄电池的单体电压、充放电流、温度以及湿度等进行实时监测。要实现电池组参数的集中监测,首先需要设计电池参数的单元采集电路,将电池的电压、电流、温度等数据采集出来,然后输入到带A/D 转换模块的单片机,对数据进行记录和显示。本文对系统的软件和硬件设计进行了详研究和分析。
1 引言
由锂离子动力电池构成的低压电源,是水下机器人系统中的关键设备。对锂离子电池的维护管理不当将直接影响锂离子电池的使用效益和寿命,甚至直接损坏锂电池,从而影响水下机器人整体性能,严重情况下还会导致机器人的安全事故。通过在线测量锂离子动力电池组的参数,可以及时了解锂离子电池的工作状态、工作特性及锂离子电池需要维护情况,因而锂离子动力电池的在线监测系统的研制势在必行。
为了实现锂离子动力电池参数的监测,首选需要设计参数采集模块,将锂离子动力电池的电压、电流、温度等参数采集出来,同时上传到带有A/D 转换模块的单片机中,对这些数据进行记录和显示。
2 锂离子动力电池组的监测系统概述
本系统采用分散数据采集和集中数据处理,分别设计电压采集电路、电流采集电路、温度采集电路,然后把数据都输送到单片机进行集中处理。系统结构图如图2-1 所示。
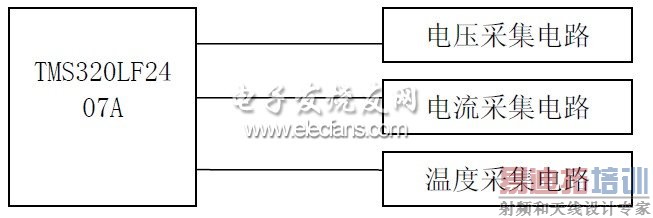
图2-1 系统结构图。
本系统监测的对象是国家863 项目水下机器人系统的锂离子动力电池组,用的是深圳雷天科技生产的TS-LFP160AHA 型号的锂离子动力电池,电池组由8 块单体电池组成。需要监测每块单体电池的端电压,并做出过压、欠压判断;需要多点测温度,监测每块电池的温度以及电池组所处环境的温度、湿度;由于8 块单体电池串联,所以只需要测出串联电流,并做出过流判断。
本文采用了TMS320LF2407A 芯片。采用此芯片作为电池监测系统的CPU 还体现在以下几个方面:
1.节能,节能已经成为现代电子设备设计的一个热点问题。当设备由二次电池来作为电源的时候,节能问题则变得更加突出和重要。本设计使用的DSP 由3.3V 电源供电,减小了控制器的损耗。芯片电源管理包括低功耗模式,能独立将外设器件转入低功耗模式。
2.16 通道输入的A/D 转换器。这一点对于多路采集子电路很有意义。可以直接将采集电路的输出接到DSP 的A/D 转换通道。而不必在DSP 外面再设A/D 转换电路。
3.40 个可单独编程或复用的输入输出引脚。可用于安全开关及其它外设电路的控制。
4.串行通信接口(SCI)和16 位串行外设接口模块(SPI)可以接监测系统的显示部分。
3 系统的硬件设计
系统的硬件设计主要包括电压采集电路、电流采集电路和温度采集电路设计。采集电路以TMS320LF2407A 为CPU。TMS320LF2407A 是TI 公司专为实时控制而设计的高性能16 位定点DSP 器件,指令周期为33ns,其内部集成了前端采样A/D 转换器和后端PWM 输出硬件,在满足系统实时性要求的同时可简化硬件电路设计。
3.1 电压采集电路设计
本设计以锂离子动力电池为管理对象。电池组由8 块3.6V 锂电池组成。每个电池单体的额定电压为3.6V 充满时端电压为4.25V。要求电压采集精度控制在1.5%以内。电池管理系统要求的最低采样频率为20ms。
系统采用线性光耦作为隔离和数据采集系统的信号传递采样器件,这样就将前端的每一节电池的电压隔离出来。将电池的大电压按一定比例缩小,以便将电池变化的电压值如实地反映给DSP。其后需经过多路开关进入微处理器进行计算。光耦隔离的优点是速度快(光耦的速度是微秒级,远小于继电器的毫秒级),实时性要好。另外光耦两端的信号在电气连接上完全隔离,不存在任何关系,所以即使在光耦的输出端发生短路也不会给电池的使用造成任何影响。光耦将电压信号转换为电流信号进行采集,解决了共地问题。与电压传感器相比,光耦的性价比更高。
在选择器件的时候,我们考虑到经济性和实用性,光电祸合器选择了日本东芝公司生产的TLP521,运算放大器选择的双运算放大器TL082。
电池单体的电压测量电路如下图3-1 所示。
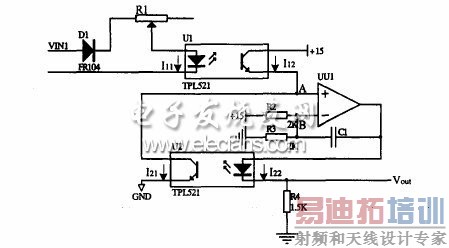
图3-1 单体电池电压采集电路。
VIN 即电池单体电压,经过R1与光耦中的发光二极管形成回路,将电压信号(VIN)转换为电流信号( I11)。I11与I21有一定比例关系I11∝ I21。UU1 在这里作为比较器使用。当A点电压Va大于B 点电压Vb,UU1 就输出高一些的电压值,当A 点电压Va低于B 点电压Vb,UU1 就输出低一些的电压值。在整个电压采样电路中,比较器形成一个反馈。使A、B 两点的电压值保持一致。这样做的目的是B 点电压显然是15∕2=7.5v, Va= Vb =7.5v,说明上下两个光耦中的三极管导通情况一样。这样,三极管的导通情况是受控于发光二极管的。可知当I21= I22时, I11= I22。这样,VIN∕= I11= I22= Vout∕R4。可见Vout 与VIN 成比例。
3.2 电流采集电路设计
锂离子动力电池组所有电池单体串连组成整个供电系统,只设置一个电流采集点即可。
本文采用霍尔电流传感器采集。
霍尔电流传感器的原理图如3-2。被测电流In流过导体产生的磁场,由通过霍尔元件输出信号控制的补偿电流Im流过次级线圈产生的磁场补偿,当原边与副边的磁场达到平衡时其补偿电流Im即可精确反映原边电流In值。
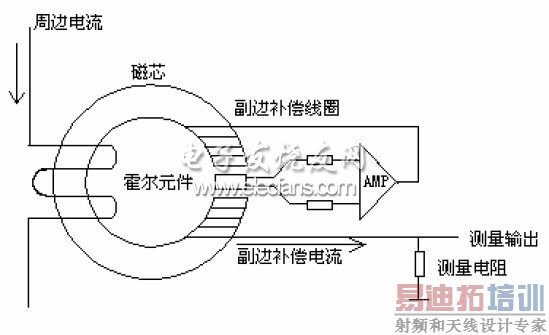
图3-2 霍尔电流传感器原理图。 [p] 本系统选用的是宇森CBH100SF 型号的闭环霍尔电流传感器。测量频率是0-100KHz,额定电流100A,测量范围:0-±150A,匝数比1:1000,精度0.2%-1%,相应时间:
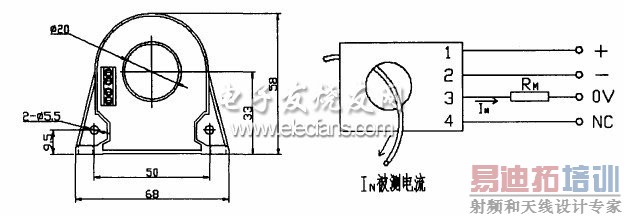
图3-3 CHB100 外型和连接图。
其中采样电阻Rm 采用精密电阻取样,推荐选用低温漂(不大于2ppm)高精度的金属膜电阻;因为寄生电感较大的原因,在高频采样场合,应避免采用精密线绕电阻。取样电阻×副边输出电流额定值应小于电源电压,差值大于4V。采样电阻的功率必须足够,Rm=30Ω。
3.3 温度采集电路设计
在电池剩余电量的计算中,电池的工作温度是一个重要的影响因素。除此之外,在判断电池安全和热处理方面也需要实时采集温度参数。本设计中,既设计了8 节单体电池的温度信号采集,也设计了对于环境温度的实时采集。
本系统是采用了热敏电阻进行电池本身的温度检测。与电桥电路结合,将温度信号反映为电压信号。电路如图3-4。
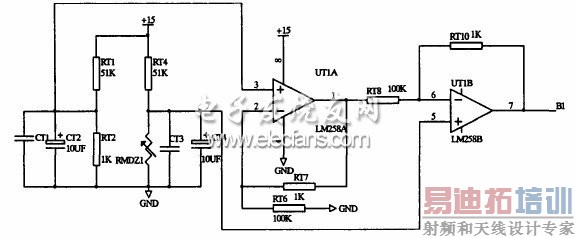
图3-4 单体电池温度采样电路
其中RMDZ1 是热敏电阻,使用它主要是考虑到性价比高,而且它的体积小连接线长,可直接贴在电池单体的外壳上。缺点就是线性度不好。电池温度的检测主要是对上下两个界限温度的报替,和计算电池间的温差,找出异常电池。不牵扯函数与复杂计算的问题,对线型度要求不高,所以使用热敏电阻可以满足需求。
环境温度的测量选用一种新颖的温度传感器LM35,其特点是输出电压与环境摄氏温度成正比,集成电路内部己经校正,无需外部校正。灵敏度为10.0mV/℃,精度可达0.5℃,工作电压范围4V-30V,耗电极少,输出阻抗低。自此使用LM35 满量程[55℃,150℃]连接方法。为了防止零下温度时,输出负压,不便于采样到DSP 中,设计了一个减法器电路。调整为环境温度在[-45℃,75℃]范围内,输出电压是[0,4.5V]。
4 系统的软件设计
本系统的软件设计采用DSP(TMS320LF2407A)C 语言编程,实行模块化设计,增加了程序的可读性和移植性。本设计主要以水下机器人使用的锂离子动力电池为研究对象而设计,同时力求能够有更好的兼容性,即换作其它电池不需要改动硬件,只需改动软件,甚至尽可能小地改动软件即可使用。对于本系统而言,控制软件应满足如下要求:
采集电流、电压、温度等信号,判断电池的故障信号,进行处理并采取相应的保护措施,显示故障信息。
模拟数据的采集包括电池单体电压、电流、电池单体温度、环境温度。其中电压采集是需要由控制模拟多路开关来完成,各个单体电池电压值分时进入DSP,要求采集同一时刻的电压与电流。充分利用TMS320F2407A/D 模块,一次采集四个量:电压、电流、电池温度、环境温度,利用循环完成对电池组中多个电池的模拟量采样。
5 总结
本课题的主要研究内容在于电池监测系统整体方案的设计和硬件电路的设计。其核心是分散数据采集与集中数据处理相结合的方案。分别采集单体电池的电压、电路、温度,将这些基本信息送到DSP 中进行集中的、综合的分析、处理。硬件设计的重点是几个采集电路的设计以及DSP 小系统在监测系统中的应用。电压采集电路在保证性能的基础上,具有灵活性和明显的价格优势。通道间的干扰和采集速度都得到改善。可满足系统的实时性和测量精度的要求。通过增加外设采样保持,可以采集到同一时刻的电压和电流。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:DSP实现EAS扫频信号源设计
下一篇:利用超声波和红外线实现综合测距定位
射频和天线工程师培训课程详情>>
