- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
新型智能化航迹仪的设计与实现
录入:edatop.com 点击:
航迹仪是舰船实时标绘海图、自动完成海图作业的导航设备。在研制航迹仪的过程中,由于各个传动零件的尺寸公差分配不合理,导致绘图精度低。为确保绘图精度,对航迹仪传动链进行了空程误差和传动误差的分析计算,合理分配各零件的尺寸公差,大大提高了航迹仪的精度,是一种由GPS接收机、监视器、电子海图控制系统组成的船用航迹仪。
GPS接收机通过导线连接到电子海图控制系统的输入端,电子海图控制系统的输出端连接监视器的输入端,其特征在于:监视器采用彩色监视器;电子海图控制系统是由中心处理器、显示控制器、地址开关电路、并串转换器、数据锁存器、随机存储器、地址锁存器及只读存储器组成,中心处理器的P0口的输出端分别连接只读存储器、数据锁存器、地址锁存器、随机存储器的信号输入端;只读存储器的信号输入端连接地址锁存器的信号输入端;数据锁存器的信号输出端连接随机存储器的输入端;地址开关电路的信号输入端分别连接地址锁存器的输出端和显示控制器的一个信号输出端,其信号输出端连接随机存储器的输入端;显示控制器同步信号输出端外接彩色监视器的同步信号输入端;并串转换器信号输入端连接随机存储器的信号输出端,其信号输出端外接彩色监视器。
1 航迹仪工作原理
航迹仪的工作过程是在计算机控制下进行的。首先,使键盘处于开放状态,通过移笔键和自检键简单检查绘图功能;然后,由综导显控台装海图并向航迹仪发出装海图命令,由此航迹仪自动进入跟踪状态。船舶航迹的实时标绘是通过实时接收由综导显控台发送的纬度、经度值及各种绘图命令,通过数学模型的解算及直线插补运算后,产生步进电机的控制脉冲序列,经功放电路驱动电动机执行。
传统的航迹仪系统有一定的局限性,存在有待改进之处:(1)传统的航迹仪系统的接口、控制、传动等部分采用分立式设计,占用了大量的空间,且价格较贵。(2)随着导航数据信息化程度的提高,设备间的通讯越发频繁,信息量亦随之增大,使用单一的串行口通讯已不能满足系统要求。(3)航迹仪与综导台使用同一操作界面,缺少独立的人机交互系统。(4)传统的航迹仪为开环系统,无检测反馈装置,影响了走笔的精度。(5)接口板的设计动态初始化要求严格,不能完全满足实时性要求。
2 航迹仪系统的硬件设计
2.1 硬件系统的总体构成
航迹仪微机控制系统是以ARM处理器S3C44B0X模块为中心的控制系统。ARM(Advanced RISC Machines)是微处理器行业的一家知名企业,设计了大量高性能、廉价、耗能低的RISC处理器、相关技术及软件。技术具有性能高、成本低和能耗省的特点。适用于多种领域,比如嵌入控制、消费/教育类多媒体、DSP和移动式应用等。ARM是微处理器行业的一家知名企业,设计了大量高性能、廉价、耗能低的RISC处理器、相关技术及软件。技术具有性能高、成本低和能耗省的特点。适用于多种领域,比如嵌入控制、消费/教育类多媒体、DSP和移动式应用等。系统的硬件结构如图1所示。

2.2 S3C44B0X主板
传统的航迹仪采用嵌入式PC/104模块为核心控制系统。系统的接口、控制、传动等部分采用分立式设计,占用的空间较大,且价格昂贵。因此在改进设计中使用基于Samsung公司生产的ARM处理器S3C44B0X芯片。由于使用基于芯片开发的主板提高设计开发的灵活性,为本系统所专用,因此所用接口、外设均为自主设计的电路,节省了不必要的开销。
S3C44B0X主板主要包括CPU模块及其辅助电路、存储器系统模块、通信模块、系统调试模块、人机接口模块及扩展总线部分。
主板外接CAN总线控制器及总线驱动器等设备,接收CAN总线上由综合导航显控台发送的实时位置、航向信息;通过人机接口接收到的触摸屏发送的控制信息,经处理后将控制命令(主要是控制脉冲频率、脉冲个数、开始停止等命令)通过扩展I/O口发送给接口板,CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由研发和生产汽车电子产品着称的德国BOSCH公司开发了的,并最终成为国际标准(ISO118 8)。是国际上应用最广泛的现场总线之一。 在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。近年来,其所具有的高可靠性和良好的错误检测能力受到重视,被广泛应用于汽车计算机控制系统和环境温度恶劣、电磁辐射强和振动大的工业环境。
2.3 XC2S50接口板
传统航迹仪使用接口板CDT800,其中包括 Am9513计数器与μPD71055I/O接口。CDT800为成品接口板,其计数器Am9513相关资料相对有限,且动态初始化要求严格,在实际应用过程中,对系统资源的占用过大,严重影响系统的实时性。
XC2S50接口板包括FPGA芯片XC2S50、配置芯片18V01、输出驱动芯片SN74LS244及外部接口电路。其原理图见图2。
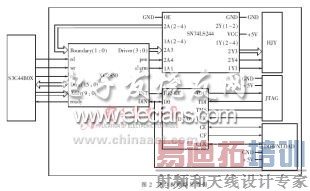
接口板的主要功能是:接收S3C44B0X主板通过数据总线发送的数据命令信息(包括:X、Y方向的分频值、脉冲个数、运行方向,以及开始/终止运行、抬落笔、报警等),经FPGA芯片XC2S50处理后,转化为相应频率的脉冲信号;再经输出驱动芯片SN74LS244,通过接口HJY传递给X、Y向的步进电机驱动器。
2.4 步进电机及其驱动器
航迹仪控制系统对快速性及定位精度均有很高的要求。考虑到系统是针对数字量及位移的控制系统,因此选用步进电机作为其执行元件。步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
系统要求绘笔绘制大量细小折线,这就要求电机工作在低频区且需要频繁地执行起动、停止、调速等操作。因此步进电机极易出现低频振荡,产生工作噪音,影响绘笔的稳定性及标绘精度。
本设计选用RORZE公司生产的5相混合式步进电机M56853D及相应的5相细分步步进电机驱动器RD-0534M。
步进电机M56853D各技术参数:
最大静转矩Mk=8.0kg·cm;电流I=3.5A/相;转子转动惯量Jr=0.240g·cm·S2;步距角(整步时)θb= = 0.72°;容许径向负载10.5kg;容许轴向负载1.5kg;转子齿数Zr=100。
细分驱动器RD-0534M各技术参数:
供电电压 DC18V~40V;细分数选用m=80;最大响应频率fMAX=500kpps,则可获得最大转速nMAX=60000/m=750r/min
改进后航迹仪系统电机步距角变为原系统的1/80,步距分辨率及控制脉冲频率均得到提高。提高后的控制脉冲频率大大超过了自由振动频率f0,从而避免了系统的低频振荡。
2.5 电磁感应式数字化板
传统的航迹仪为开环系统,无检测反馈装置。改进设计中增添了数字化板。这一反馈模块,构成了一套完整的闭环控制系统,增强了稳定性,降低了误差。
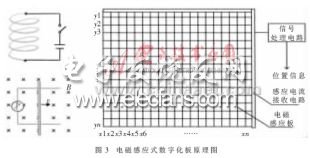
数字化板的工作原理:在标绘仪的绘图平板上布上导线形成格栅,把电磁发射线圈安装到绘笔上,此时把线圈圆心和绘笔圆心标定在同一直线上;绘笔在平板上绘图,而线圈不断发射磁场脉冲,导线切割磁场产生感应电流,通过接收电路和信号处理电路得到绘笔在绘图平台上的相对位置(绘笔位置)。数字化板工作原理如图3所示。
3 航迹仪系统的软件设计
3.1 S3C44B0X主板部分的软件设计
操作系统是控制和管理计算机软硬件资源、合理组织计算机工作流程、方便用户的程序集合。航迹仪功能的完成,很大程度上取决于操作系统软件平台的选择和应用程序的编制。
主板软件系统主要由主程序、命令解释部分、底层部分组成。其中,主程序到命令解释部分的调用通过函数shibie( )进行;命令解释部分到底层部分的调用通过函数zxcb( )进行。
3.1.1 主程序
主程序主要对综导台命令和触摸屏命令进行管理、调度。程序执行过程中查询随机命令数和推位命令数这两个变量。变量小于等于零时,没有综导台命令,程序查询触摸屏有无按下及键值,执行响应操作。当两个变量大于零,说明有了综导台命令,就会自动进入跟踪状态。在跟踪状态,不响应触摸屏命令,控制程序只查询有无随机命令及推位命令,转入响应的命令解释程序。
3.1.2 命令解释部分
命令解释部分主要功能:通过函数shibie( )对每一条命令进行识别及格式检查。对于随机命令和推位命令,每从CAN总线上接收一条命令,相应的命令条数加1。每执行完一条,相应的命令条数减1,同时指向下一条。只要这两个变量不为零,就说明有综导台命令未处理。通过检查随机命令数和推位命令数,即可按先后次序顺次执行所有命令。
本部分中还包括海图坐标转换程序,其主要功能:主板接收装海图命令的同时,会读取CAN总线上由综导台发送的海图信息,包括海图类型(墨卡托或高斯海图)、大小、比例等。程序根据这些信息,将海图上的经纬度值折算成XY轴坐标,以便于底层的直线差补程序将XY坐标量转换成步进电机的走步脉冲数。
3.1.3 底层部分
底层包括所有的画线、写标记符等绘笔执行动作的程序,及与硬件有关的I/O操作子程序、中断服务程序。下面介绍几个主要的程序。
(1)直线差补程序
线段是航迹仪绘制的基本图形,其他各种曲线都是以线段逼近的。设线段终点到起点坐标长度分量分别为Δx、Δy。令X、Y向步进电动机同时起动,同时停止,分别以均匀速度Vx、Vy运动。这样
,即
。
程序设计中,已知X、Y向的增量驻x、驻y,选增量大的方向的走步频率为最大走步频率f1=fM,另一方向频率即为f2=fM×Δy/Δx。已知两个方向的走步频率,由接口板计数器的初始频率12MHz可计算出X、Y向的分频值;已知的脉冲当量可求出X、Y向各自需要的走步脉冲数。将分频值、脉冲数及开始/停止等控制信息传送给接口板,使其产生相应频率的脉冲信号,以控制步进电机。
(2)CAN总线通讯任务模块
设计中采用PHILIPS公司的CAN总线控制器SJA1000,CAN总线驱动器选用82C250。
综导台将导航数据通过CAN总线发送给航迹仪。通讯模块主要实现对航迹仪数据报文接收、解析等。当有CAN报文到达,SJA1000产生中断释放信号量。设备工作任务中轮询等待信号量接收CAN报文。对接收的CAN报文,首先存入CAN接收数据结构,解析后读入航迹仪数据结构。CAN接收数据结构在接收CAN报文时临时分配。在报文解析过程中,接收的报文通常为BCD码,因此要将其还原为ASCII码。 [p] (3)LCD屏显示及触摸程序
LCD 液晶显示器是 Liquid Crystal Display 的简称,LCD 的构造是在两片平行的玻璃当中放置液态的晶体,两片玻璃中间有许多垂直和水平的细小电线,透过通电与否来控制杆状水晶分子改变方向,将光线折射出来产生画面。比CRT要好的多,但是价钱较其贵。本设计采用SHARP公司的144.78mm、LM057QC1T01型STN彩色液晶显示器,其显示格式为320像素(×3)×240行。
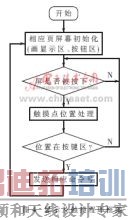
LCD触摸屏程序主要分为显示任务FsceShow,触摸屏查询任务TouchCheck,触摸屏状态查询任务TouchStateCheck。TouchCheck入口函数Touch_check( )查询触摸屏中断,TouchStateCheckt( )查询触摸屏状态改变,FaceShow执行响应,显示图形。程序框图如图4所示。
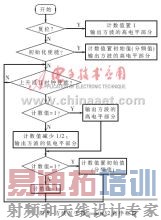
(4)位置补偿模块
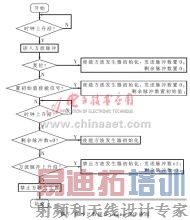
如前文所述,在步进电机运行完一次由运行到静止的过程后,把目标位置与从数字化板发送的实际位置做差比较得到的位置差量Δd作为一次操作补偿。其特点是在一次绘图过程中有两次电机的开始和停止,补偿速度慢,但所绘的是近似真实的图形。程序框图如图5所示。

3.2 XC2S50接口板部分的软件设计
XC2S50接口板软件部分采用VHDL语言编写。编译后通过JTAG口烧写入配置芯片18V01中。软件部分主要包括顶层模块jkb_top、接口模块jiekou、脉冲发生模块pulse_generate、速度控制模块speed_ctr、脉冲计数模块counter、方波发生器counter32等。其结构框图如图6所示。

在脉冲发生模块pulse_generate中,速度控制模块speed_ctr的主要功能是:通过查询发送、剩余脉冲数,计算出响应的速度控制级别(可分为4种模式),将速度控制信息传送给脉冲计数模块counter。两个脉冲计数模块counter分别控制X、Y两个步进电机的走步步数。它们分别以X、Y向驱动脉冲作为输入时钟信号,纪录两向脉冲数,发出使能信号以控制counter32,其原理如图7所示。两个方波发生模块counter32分别对X向、Y向步进电机驱动器输出方波,其输出波形的频率即为步进电机的走步频率,如图8所示。接口模块jiekou接收来自主板发送的X、Y向分频值、脉冲数数据信息,以及运行方向、开始终止、抬落笔、报警等控制信息,并将数据信息发送给pulse_generate模块,将控制信息发送给驱动板。
新型智能化航迹仪设计,针对传统航迹仪系统的诸多问题,给出了有效的改造方案。改造方案降低了成本,增强了功能的针对性,节省了系统资源。数字化板的使用,为原开环系统增加了闭环反馈,提高了标绘精度。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
