- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于DSP的外部存储器引导方法实现
录入:edatop.com 点击:
TI公司的高速数字信号处理器TMS320C6000系列DSP支持并行处理,采用甚长指令字(VLIW)体系结构,内部设置有8个功能单元(两个乘法器和6个ALU),8个功能单元可并行操作,最多可以在一个周期内同时执行八条32位指令。指令操作为“流水线”工作方式。应用高性能DSP可以大大提高数据密集型应用系统的性能,能快速完成滤波、卷积、FFT等数字信号处理或进行更复杂的运算,在现代信号数字化处理中有很好的应用前景。
由于内部结构上的差异,TMS320C6000系列与TMS320C54系列的引导方式有很大差别。在开发应用TMS320C6000系列DSP时,许多开发者,尤其是初涉及者对DSP ROM引导的实现有些困难,花费许多时间和精力摸索。笔者结合开发实例,介绍了实现外部存储器引导的具体方法。
DSP的引导过程
DSP系统的引导(BOOT)是指系统加电或复位时,DSP将一段存储在外部的非易失性存储器的程序代码通过DMA方式拷贝到内部的高速内存中运行。这样既能扩展DSP有限的存储空间,又能充分发挥DSP内部资源的效能。用户的代码也可以通过掩膜方式写入到DSP内部ROM中,但这样受容量和价格的限制,且不便于扩展和升级。
DSP的引导过程如下:
1) DSP复位后,通过DMA方式将外部CE1空间的数据读入到内部程序空间地址0处,读入数据的多少因芯片而异(TMS320C6712一次只拷贝1KB)。
2) DSP推出复位状态,开始执行内部程序空间地址0处的程序,这段程序先将外部主程序数据读入到DSP内部程序空间相应地址,然后跳转到主程序运行。
第一步是由芯片自动完成,关键是第二步:用户需要编写相应的汇编程序,实现二次引导,即用户主程序的装载。
引导失败的原因分析
(1)链接命令文件(.cmd)文件
链接命令文件定义了链接的参数,描述系统生成的可执行代码各段的段名及映射到目标板的物理空间。当这些段的起始地址或段的长度编写错误时,引导程序就可能发生错误。
(2)可执行代码的二进制文件格式
用户的程序在CCS开发环境下编译生成COFF文件格式,仿真过程中可以直接加载COFF文件运行。但当调试仿真通过后,目标板要脱离CCS环境独立运行时,可执行代码就需要转换为二进制文件格式,保存在目标板的外部存储器上。转换时需要使用正确的配置文件。
(3)目标板的硬件电路(引导模式,系统时钟)
目标板的硬件电路也会影响引导程序的正常运行,如设置的引导模式与实际的外部存储器不符,系统时钟电路不工作,复位信号恒有效等。
下面结合TMS320C6212的开发实例,具体介绍外部存储器引导的实现。
ROM引导实例
TMS320C6212是TMS320C6201的简化版芯片,内部资源相对较少,工作频率相对较低,但其价格低廉,具有很高的性能价格比。TMS320C6212的工作频率可达150MHz,最高处理能力为900MIPS,很适合中小型系统开发。
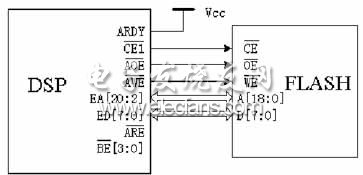
由于FLASH是一种高密度、非易失的电擦写存储器,系统采用FLASH作为外部存储器。除了专用的硬件编程器可以把二进制代码写入FLASH中,还可以利用DSP的调试系统,通过软件编程写入。DSP与FLASH的接口连接如图1所示。
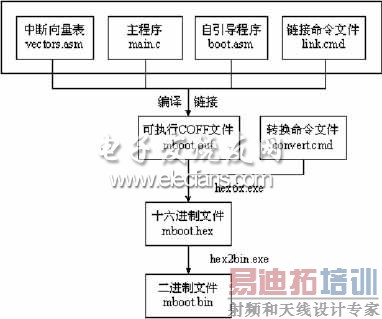
系统工程在CCS开发环境下使用C语言编程,这样可以缩短开发周期,提高工作效率,并具有移植性好的优点。引导工程的文件流程如图2所示。
 [p]
[p]
(1) 中断向量表 vectors.asm
中断向量表缺省保存在DSP芯片内部RAM的0地址开始的0x200字节空间,上电或复位后,芯片自动运行复位中断。因此,复位中断向量设置为引导程序(_boot)的入口地址,引导程序的主体在boot.asm中定义。部分程序如下:
.ref _boot ;调用引导程序
.sect “.vectors” ;段声明
RESET_RST: ;复位中断向量
mvkl .S2 _boot, B0 ;装载引导程序地址
mvkh .S2 _boot, B0
B .S2 B0 ;跳转到引导程序执行
NOP 5
(2) 自引导的汇编程序 boot.asm
自引导汇编程序主要是配置基本的寄存器,并将保存在外部FLASH中的二进制程序拷贝到DSP内部的RAM中再执行。由于TMS320C6712自动拷贝1KB,因此起始地址是从0x400开始,汇编程序如下:
.sect “.boot_load” ;定义数据段
.ref _c_int00 ;声明外部函数
.global _boot ;定义全局函数
_boot:
;先设置控制寄存器,如EMIF_GCR等,(略)
;拷贝FLASH中的程序到DSP内部RAM
mvkl 0x00000400, A4 ;A4为RAM地址指针
|| mvkl 0x90000400, B4 ;B4为FLASH地址指针
mvkh 0x00000400, A4
|| mvkh 0x90000400, B4
zero A1 ;A1用作计数器
_boot_loop: ;DSP开始读取FLASH中程序
ldb *B4++, B5
mvkl 0x0000F200, B6 ;B6为需要拷贝的字节数
add 1, A1, A1
|| mvkh 0x0000F200, B6
cmplt A1, B6, A0
nop
stb B5, *A4++
[B0] b _boot_loop
nop 5
mvkl .S2 _c_int00, B0 ;循环结束后,跳转到主函数main执行
mvkh .S2 _c_int00, B0
B .S2 B0
Nop 5
(3) 主程序 main.c
主程序是DSP要实现具体功能的主体,其定义的主函数main()经编译后在函数_c_int00中调用,因此在上面的引导程序结束时,将跳转到函数_c_int00,即主函数main执行。
(4) 链接命令程序 link.cmd
链接命令程序用于定义系统各存储器的地址及大小,并分配编译后各段到相应的存储空间,link.cmd内容如下:
-c
-lrts6201.lib
MEMORY
{
vecs: o = 00000000h =00000200h
BOOT_RAM: o = 00000200h l = 00000200h
IRAM: o = 00000400h l = 0000c400h
CE0: o = 80000000h l = 01000000h
CE1: o = 90000000h l = 00100000h
}
SECTIONS
{
.vectors > vecs fill = 0
.boot_load > BOOT_RAM fill = 0
.text > IRAM fill = 0
.stack > IRAM fill = 0
.bss > IRAM fill = 0
.cinit > IRAM fill = 0
.far > IRAM fill = 0
.sysmem > IRAM fill = 0
.cio > IRAM fill = 0
}
(5) 转换命令程序 convert.cmd
上面的工程文件经CCS系统编译、汇编后生成可执行COFF文件(.out),它需要转换为二进制文件,再写入到FLASH中。CCS开发系统带有转换程序:
hex6x.exe 将可执行COFF文件(.out)转换为十六进制文件(.hex)
hex2bin.exe将十六进制文件(.hex)转换为二进制文件(.bin)
命令行的格式为:
hex6x.exe convert.cmd
hex2bin.exe mboot
其中convert.cmd内容如下:
mboot.out ;输入文件名 .out 格式
-x
-map mboot.map ;生成映射文件
-image
-memwidth 8 ;内存的位宽
-o mboot.hex ;输出文件名 .hex格式
ROMS
{
FLASH: org = 0, len = 0x10000, romwidth = 8
}
结束语
综上所述,实现TMS320C6712的外部内存自引导并不复杂,关键是要理解芯片的自引导过程和程序汇编后各部分的作用,配置好引导代码段和程序代码段的实际物理地址,并且正确地初始化相应的寄存器和变量。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:现代FPGA设计的能源优化方案
下一篇:基于TMS320C6416的语音净化系统
射频和天线工程师培训课程详情>>
