- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
电力驱动系统逆变器实时仿真
录入:edatop.com 点击:
在交通和某些工业领域中的电力驱动系统的研制过程中,直接使用实际电机系统对新的控制器进行测试,实现起来比较困难,而且费用较高。因此,需要介于离线仿真和实机试验之间的逆变器-交流电机实时仿真器,与实际控制器硬件相连,在闭环条件下对实际控制器进行实时测试。由于这种实时仿真系统回路中有实际控制器硬件介入,因此被称为硬件在回路仿真(Hardware-in-the-Loop Simulation)。
尽管在真实系统上进行试验是必不可少的,但是由于采用实机难以进行极限与失效测试,而采用实时仿真器可以自由地给定各种测试条件,测试被测控制器的性能,因此实时仿真器可作为快速控制原型(Rapid Control Prototyping)的虚拟试验台,在电机、逆变器、电源和控制器需要同时工作的并行工程中必不可少。
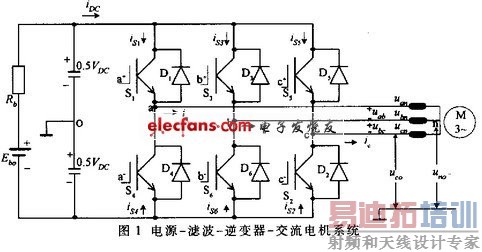
图1 电源-滤波-逆变器-交流电机系统
由于目前数字计算机处理速度的限制,不能实现亚微秒级物理模型实时仿真,需要对逆变器开关过程进行理想化处理,因此引入了离散事件系统。离散事件逆变器子系统与连续时间电机子系统耦合,使变流器-电机实时仿真器成为变因果和变结构系统。变因果是指离散开关事件发生前后,描述连续时间电机子系统的动态方程的输入变量与输出变量会变换位置;变结构是指在仿真进程中,离散开关事件引发状态转换,使连续系统结构发生变化。因而需要对动态方程不断地进行调整和初始化[1]。
框图建模工具Simulink是控制工程仿真的工业标准,但Simulink本质上是一种赋值运算,由其方框图描述的系统是因果的。为了能应用Simulink建模工具,应该使变流器-电机实时仿真系统解耦为两个独立子系统,以消除变因果、变结构问题。
作为功能性建模方法之一的开关函数,可用于确定变流器开关器件电压与电流波形计算,以便进行系统优化设计。它在变流器的离线仿真中已得到成功的应用[2~3]。本文应用文献[2]
的开关函数描述法,采用实际控制器输出的PWM开关逻辑信号定义正、负半桥开关函数,建立逆变器的Simulink模型。该模型既可实现实时仿真系统中逆变器与电机模型的解耦,又可以确定逆变器设置的开关死区时间,防止同一桥臂开关管直通。文中还将给出基于dSPACE实时环境的逆变器-异步电机开控制系统实时仿真的实现方法和结果。

图2 逆变器系统Simulink框图 [p] 1 逆变器Simulink模型
双电平三相电压源型逆变器由6个开关管和6个与开关管反向并接的续流二极管组成,见图1。采用实际控制器输出的6个PWM开关逻辑信号a+,b+,c+;a-,b-,c-定义逆变器a,b,c三相正半桥开关函数:
Sfap=1·×a+,SFbp=1×b+,SFcp=1×c+
和负半桥开关函数:
SFan=1×a-,SFbn=1×b-,SFcn=1×c-。
则全桥开关函数为:
SFa=Sfap-SFan,SFb=SFbp-SFbn,SFc=SFcp-SFcn。
逆变器输出端a,b,c与直流电流中点o之间的电压为:uao=0.5VDC×Sfab,ubo=0.5VDC×SFb,uco=0.5VDC×SFc,
其中,VDC为直流环路电压。由此得到线电压为:
uab=uao-ubo,ubc=ubo-uco,uca=uco-uao
相电压为:
uan=uao-uno,ubn=ubo-uno,ucn=uco-uno。
式中,uno=(1/3)(uao+ubo+uco)为电机三相绕组中点n与直流电流中点o之间的电压。
正半桥a,b,c相开关器件电流为:
is1=ia×Sfap,is3=ib×SFbp,is5=ic×SFcp
负半桥a,b,c相开关器件电流为:
is4=ia×SFan,is6=ib×SFbn,is2=ic×SFcn
三相电流为:
ia=is1+is4,ib=is3+is6,ic=is5+is2
另外开关电流为:
is1=is1_s-is1_D,iS4=is4_D-is4_s
直流电流为:
iDC=is1+is3+is5
其中,is1_s,is1_D,is4_s,is4_D分别为a相正、负半桥开关管和续流二极管电流。据此,可建立逆变器的Simulink框图模型。图2(a)~(d)分别是逆变器模型顶层和底层的Simulink框图。
2 实时仿真系统实现
著名的机电控制系统开发平台较是基于MATLAB/Simulink/Real-Time Workshop[4~5]开发的dSPACE实时系统。本文的相关课题选用单板dSPACE系统DS1103。
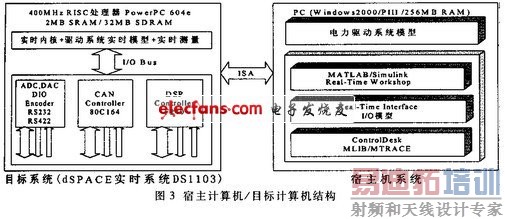
图3 宿主计算机/目标计算机结构
DS1103采用32位精简指令集处理器PowerPC 604e进行浮点运算。精简指令集处理器采用小指令集、多寄存器结构,指令执行简单快速;统一用单周期指令,克服了复杂指令集处理器周期指令有长有短,造成运行中偶发不确定性,致使运行失常的弊端。
DS1103板插入PC机主板的ISA扩展槽中,由PC机提供电源,所有的实时计算都是由DS1103独立执行,而dSAPCE的试验工具软件则并行运行于PC主机上。宿主计算机/目标计算机结构如图3所示。
Real-Time Interface(RTI)是dSPACE系统的实时实现软件,它对实时代码生成软件Real-Time Workshop进行扩展,集成了dSPACE系统I/O硬件实时模型,可实现从Simulink模型到dSPACE系统实时C代码的自动生成同,生成的实时代码包括实时内核和应用代码[6]。RTI还根据信号和参数产生一个变量文件,可以用dSPACE的试验工具软件ControlDesk进行访问[7]。
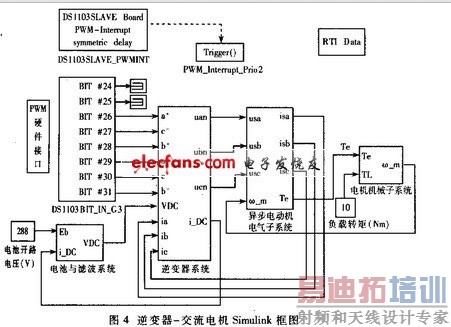
在功能强大的实时代码实现软件RTI与界面友好的试验软件ControlDesk支持下,可以很快地实现电力驱动系统快速控制原型与硬件在回路仿真测试。图4是采上述的逆变器模型与dSPACE系统I/O硬件模型组建的逆变器-交流电机系统Simulink框图。图中下部是逆变器-异步电机系统模型,作为实时任务T1,模型具有实际控制器的硬件接口,可输入6路实际的PWM开关信号,输出电流、电压等模拟信号;上部是PWM控制器模型,作为实时任务T2,模型由DSP控制器F240硬件产生实时PWM信号。T1与T2以异步采样模式工作,构成两定时器任务系统。为减少采样控制器输出引发的可变延时造成抖动的影响,设置T1的采样速率远高于T2的采样速率。
3 实时仿真结果
系统仿真是针对某电动汽车电力驱动系统的,其中逆变器参数为:PWM开关频率fPWM=1kHz,开关死区时间=7μs;直流电源与滤波参数为:电池开路电压Ebo=288V,电源内阻Rb=0.03Ω,滤波电容C=10000μF;异步电机参数为:132V,182A,50Hz,45kW,2900rpm;负载转矩=50Nm;交流电源参数为:相电压幅值=100V,频率=50Hz。实时仿真采用Euler数值积分方法(ODE1),T1采样周期=11μs,T2采样周期=PWM周期=1ms。
 [p]
图4 逆变器-交流电机Simulink框图
[p]
图4 逆变器-交流电机Simulink框图
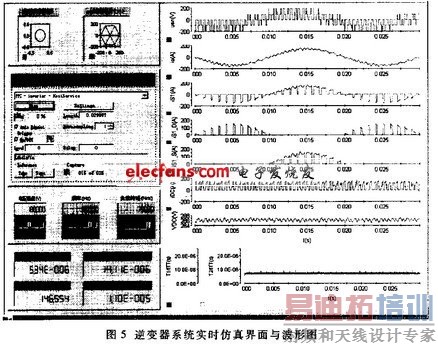
图5是相电压uan、相电流ia、a相上半桥开关电流is1、S1开关管电流is1_s、S1续流二极管电流is1_D、直流环路电压VDC、直流环路电流iDC、任务总执行时间T1/tTT和T2/tTT的实时仿真波形。图中还显示出逆变器的输出电压空间矢量的矢端轨迹为正六边形,并内含从零电压矢量至六边形顶点的连线;而电机的转子磁链空间矢量的矢端轨为圆形。实时仿真系统经长时间连续运行,没有出现数值不稳定问题。
作为比较,对相同系统参数的逆变器-交流电机系统进行步长为100ns的离线仿真,并采用与实时仿真相同的Simulink模型(无硬件接口)和数值积分方法。结果是更小的步长并没有对仿真精度有明显的改进,这表明步长为11μs的实时仿真已经具有较高的仿真精度。
图5 逆变器系统实时仿真界面与波形图
本文提出的逆变器模型已分别在交流永磁同步电机、无刷直流电机和异步电机驱动系统的硬件在回路仿真测试中得到成功应用。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:大功率LED的温度补偿原理
下一篇:太阳能热水器自动温度控制器设计原理
射频和天线工程师培训课程详情>>
