- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于FPGA的智能营区防冲击系统设计
录入:edatop.com 点击:
摘要:为提高安防措施,延缓不法分子动作,确保营区安全,提出一种营区智能防冲击系统解决方案。该方案以移动物体的外形形状、车牌信息、车辆速度为输入特征,采用虚拟线圈感应、车牌识别、车辆测速、系统控制等方法来实现预警警告和阻车钉的自动弹出,阻止不法车辆的通行。重点阐述该方案的系统构成及各模块的工作原理,设计并实现了基于Virtex 5系列XC5VSX50T芯片的硬件平台。
关键词:Virtex 5;虚拟线圈;神经网络;车牌识别;车辆测速;防冲击系统
0 引言
近年来,国际国内安全形势不容乐观,恐怖活动呈上升趋势。因种种问题冲击政府、军队、企业的事件逐年增多,其中就有恐怖分子利用汽车为作案工具携带爆炸装置冲入目标单位引爆,造成伤亡的案例。如何才能对犯罪嫌疑车辆实施迅速有效的设卡拦截,给公安、武警提出了新的课题,提高智能拦截性已经是当务之急。通过调研发现,国内大多数营区的营门安防措施较为单一,防御车辆冲击设备基本为减速带、阻车钉等,而且阻车钉均为有线、或无线遥控式触发。由于恐怖活动事发突然,汽车快速闯入营区,值守人员来不及做出反应,阻车钉不能在适当时机弹出。因此,为确保政府、军队、企业等目标单位安全,设计一种营区防冲击系统,通过模拟线圈感应、车牌识别、车辆测速、系统控制、预警警告等技术使阻车钉自动弹出,可以对恐怖分子驾车冲击营区实施有效的拦截。
1 系统实现框图及各部分工作原理
1.1 智能营区防冲击管理系统方案
政府、军队、企业等单位一般都设有车辆出入专用车道,且都有警卫人员,如图1所示。
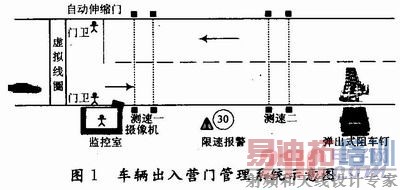
当车辆行驶至营门出入口处10 m,即图1中的虚拟线圈感应区时,摄像机自动检测车辆的车牌信息。其基本流程为:车辆是否为本单位车辆→阻车钉是否弹出。经判断后,对出入营区的车辆分以下三种情况来处理:
(1)本单位车辆
当车辆到达虚拟线圈感应区时,系统即自动识别该车车牌,并判断是否为本单位车辆,若是本单位车辆,系统清零,摄像机复位,测速设备不工作,系统处闲置状态。
(2)临时车辆
当车辆到达虚拟线圈感应区时,系统判断非本单位车辆,自动抓拍,营区值班员招停,并作好信息登记后,向驾驶员发出慢速驶入营区指令。如果该车未听指令加速行驶,系统设有两道测速线,车辆驶过第一道测速线,若超过限速,系统迅速弹出立即减速警示牌并警铃报警,提示驾驶员减速;车辆驶过第二道测速线,若未减速仍超过限速,阻车钉弹出,示为危险车辆。
(3)特殊车辆
特殊车辆包括军车、警车、救护车等,营门值班人员可根据实际情况做出相应处理。
1.2 智能营区防冲击系统的基本框图
本文所论述的营区防冲击系统理论上主要是基于FPGA和DSP系统设计的。利用FPGA来实现图像及速度信号的采集与传输,系统的整体控制等操作。利用DSP的快速运算能力来实现车牌的识别。该系统的基本框图如图2所示。
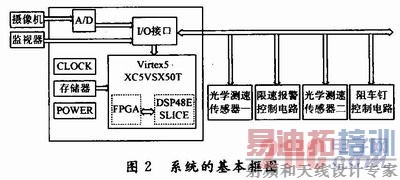
摄像机不断地往视频解码芯片A/D里传输监控视频流。当车辆经过触发线时,触发车辆检测器,检测器给FPGA一个检测脉冲,触发FPGA从视频流中截取一帧图像。FPGA缓存一行的图像数据,行满时利用中断通知DSP获取图像。DSP利用EDMA从FPGA中获取图像数据,当接收完一帧的图像数据后,以帧为单位,启动算法开始对图像进行处理。获得结果被写入FPGA中与存储数据对比。测速信号由测速传感器发送至FPGA中,在FPGA内部直接处理,后根据判断结果,发出控制信号决定警报器是否报警或阻车钉是否弹出。 [p]
1.3 智能营区防冲击系统的硬件平台设计
目前,应用于模式识别、系统测速等设计方案大都采用两片甚至更多微处理器的主从式结构,一片负责高速数据采集任务,一片负责完成复杂的信号处理,如FPGA+DSP、ARM+DSP等。本文主要涉及的关键技术有模拟线圈感应设计、车牌自动识别设计、汽车红外光测速设计等,考虑到营门区车流量较小,数据处理流量不大,但系统模块化程度高等特点,结合FPGA+DSP结构特点,采用了Xilinx公司Virtex 5系列的
XC5VSX50T芯片。如图2所示。Virtex 5系列是第一个充分发挥了65 nm工艺性能、密度和成本优势的FPGA系列产品,提供550 MHz DSP48ESl-ice逻辑片支持,内置有25×18MAC,能够在资源使用率低于50 %的情况下实现单精度浮点运算。其特点是:速度等级更高、功耗更低、嵌入式处理器能力更强、DSP计算能力更大、简化了外部接口设计、成本进一步降俯。因此根据既要完成系统控制和数据采集任务,也要完成复杂的信号处理的要求,该芯片达到系统需求,符合成本低、重量轻、功耗小等要求。
1.4 虚拟线圈感应设计
为提取车辆信息,防止移动目标混淆系统工作,产生错误判断,采用一种虚拟线圈识别车型的方法。该方法将检测线与虚拟线圈相结合,对提取的移动信息进行预处理,以触发线检测到达预先设置位置的移动目标,然后触发虚拟线圈来提取移动目标特征,通过BP神经网络来识别出是否为车,是车判断“1”,系统进入下一步工作,不是车判断“0”,系统复位,降低了系统出错率,达到系统正常工作的目的。
触发线是在图像序列的适当位置设置一个平行条状的线型,当有车辆进入触发线时,通过当时触发线位置的像素与相应背景图像触发线位置的像素比较,如果触发线位置像素灰度值变化大于一定的阈值,就认为检测到车辆到达检测线的位置。如图3所示。
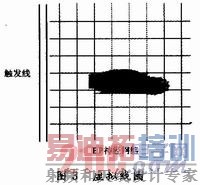
在图3中,红色方块代表着虚拟线圈。虚拟线圈就是在图像上设置一系列由N×N像素大小组成的方块。由于车辆到达触发线,触发线检测到2条黑色平行线间的像素变化,所以发出触发信号。当接收到检测线的触发信号时,可通过当前帧与背景图像的虚拟线圈位置的比较来判断每个小线圈是否有车辆占据。如果大于一定阈值可判断有车占据,并通过长、宽和面积可判断出具体车型。
1.5 车牌自动识别设计
汽车牌照自动识别是该系统主要功能模块之一。其功能是利用车牌是车辆身份的惟一标识的思想概念来智能识别和统计车辆。它主要采用先进的图像处理、模式识别和人工智能技术,通过对车辆图像的采集和处理,获得车辆的数字化信息,以决定该车是否为本单位车辆。
车牌自动识别模块由车牌图像的捕获,车牌识别,识别结果处理等部分组成。车牌图像捕获 主要是利用图像采集装置将摄像机所采集的图像信息有效的传输至车牌识别系统内部,以便进行进一步的识别与处理。
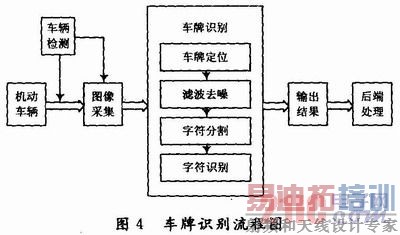
车牌识别 是指当采集到的车牌图像传输到处理器XC5VSX50T芯片的DSP48e处理模块后,进行车牌的精确定位、滤波去噪处理、字符分割、字符识别等步骤,通过车牌识别模块的核心识别算法来识别处车辆牌照的信息。如图4所示。
识别结果处理 识别结果由DSP发出后经过FPGA系统内部本单位车辆数据库的对比,进行验证。是本单位车辆,放行,系统复位;不是本单位车辆,进入下一步骤。 [p]
1.6 汽车红外光测速设计
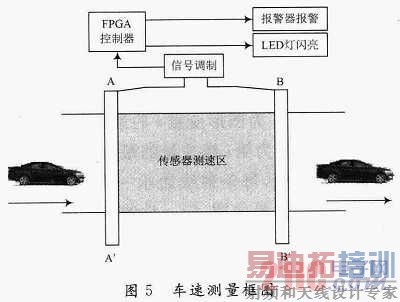
因雷达测速成本太高、线圈测速易老化和损坏,所以方案采用红外光测速模式。测速模块由4个红外发光传感器以及报警LED灯等系统构成,分别为A,B,C,D四组,AB为第一组测速,后接报警器及LED限速灯,CD为第二组测速,以AB组为例,如图5所示。
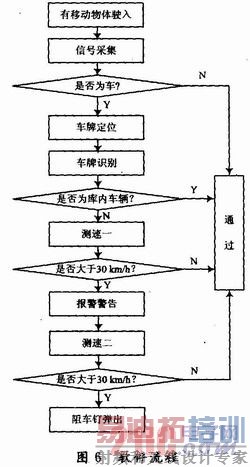
图5中A,B两点是路旁一侧上的两点,分别安装着可发射38 kHz的红外发光管,相应对面的两点A’、B’处安放的光电接收器接收,共同组成一个光控测速区。当有车辆通过光控测速区时,A点发出的光线首先被阻断,第一个光电探测器A-A’将光信号转换为电信号送入信号调制电路,经过放大、整形,送至FPGA处理器。FPGA接到此触发信号,打开内部计数器开始计数,时间t的值相应不断增加。当汽车达到B点时,第二个光电探测器B-B’将光信号转换为电信号经信号调制电路送至FPGA处理器使计数器停止计数,t的值就确定了。由A,B两点间的距离S除以t便得到速度v。如果计算得到的v值在设定的安全速度范围之内,LED限速灯、报警电路就不工作,如果车辆由B驶向A,即反向驶出,系统也不工作;如果v值超出设定范围之外,则计算速度偏移量△v=Vmax-v,如果△v<“O”,则LED限速灯闪亮、报警电路启动工作。
2 软件流程
Xilinx提供了AccelDSP综合工具,该工具基于Matlab高级语言开发Xilinx的DSP模块,可自动完成浮点到定点的转换,生成可综合的VH-DL或Verilog代码,并为验证过程创建测试基准向量。软件部分主要功能是完成数据采集、系统的控制以及图像处理运算。系统软件的执行流程如图6所示。
3 结 论
本文提出了基于FPGA的智能营门防冲击系统设计,并阐述了主要模块的设计方法。经理论认证,该系统对防范恐怖分子冲击营区有一定的作用,能够克服突发情况下营门值守人员的慢反应,大大提高政府、部队、企业营区的安全性。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:LED照明技术知识之降压结构的实现
下一篇:实用小功率开关稳压电源的设计
射频和天线工程师培训课程详情>>
