- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
直流电机PWM调速系统中控制电压非线性研究
录入:edatop.com 点击:
0 引言
由于线性放大驱动方式效率和散热问题严重,目前绝大多数直流电动机采用开关驱动方式。开关驱动方式是半导体功率器件工作在开关状态,通过脉宽调制PWM控制电动机电枢电压,实现调速。目前已有许多文献介绍直流电机调速,宋卫国等用89C51单片机实现了直流电机闭环调速;张立勋等用AVR单片机实现了直流电机PWM调速;郭崇军等用C8051实现了无刷直流电机控制;张红娟等用PIC单片机实现了直流电机PWM调速;王晨阳等用DSP实现了无刷直流电机控制。上述文献对实现调速的硬件电路和软件流程的设计有较详细的描述,但没有说明具体的调压调速方法,也没有提及占空比与电机端电压平均值之间的关系。在李维军等基于单片机用软件实现直流电机PWM调速系统中提到平均速度与占空比并不是严格的线性关系,在一般的应用中,可以将其近似地看作线性关系。但没有做深入的研究。本文通过实验验证,在不带电机情况下,PWM波占空比与控制输出端电压平均值之间呈线性关系;在带电机情况下,占空比与电机端电压平均值满足抛物线方程,能取得精确的控制。本文的电机闭环调速是运用Matlab拟合的关系式通过PID控制算法实现。
1 系统硬件设计
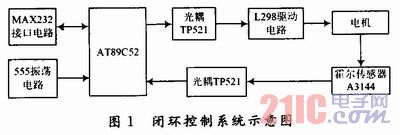
本系统是基于TX-1C实验板上的AT89C52单片机,调速系统的硬件原理图如图1所示,主要由AT89C52单片机、555振荡电路、L298驱动电路、光电隔离、霍尔元件测速电路、MAX 232电平转换电路等组成。
2 系统软件设计
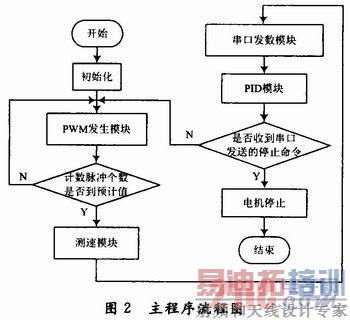
系统采用模块化设计,软件由1个主程序,3个中断子程序,即外部中断0、外部中断1,定时器0子程序,PID算法子程序,测速子程序及发送数据到串口显示子程序组成,主程序流程图如图2所示。外部中断0通过比较直流电平与锯齿波信号产生PWM波,外部中断1用于对传感器的脉冲计数。定时器0用于对计数脉冲定时。测得的转速通过串口发送到上位机显示,通过PID模块调整转速到设定值。本实验采用M/T法测速,它是同时测量检测时间和在此检测时间内霍尔传感器所产生的转速脉冲信号的个数来确定转速。由外部中断1对霍尔传感器脉冲计数,同时起动定时器0,当计数个数到预定值2 000后,关定时器0,可得到计2 000个脉冲的计数时间,由式计算出转速:
n=60f/K=60N/(KT) (1)
式中:n为直流电机的转速;K为霍尔传感器转盘上磁钢数;f为脉冲频率;N为脉冲个数;T为采样周期。
3 实验结果及原因分析
3.1 端电压平均值与转速关系
3.1.1 实验结果
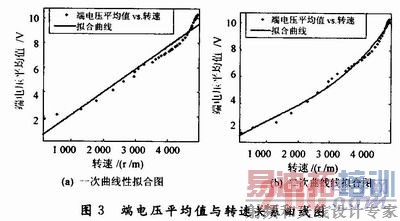
实验用的是永磁稳速直流电机,型号是EG-530YD-2BH,额定转速2 000~4 000 r/min,额定电压12 V。电机在空载的情况下,测得的数据用Matlab做一次线性拟合,拟合的端电压平均值与转速关系曲线如图3(a)所示。相关系数R-square:0.952 1。拟合曲线方程为:
y=0.001 852x+0.296 3 (2)
由式(2)可知,端电压平均值与转速可近似为线性关系,根椐此关系式,在已测得的转速的情况下可以计算出当前电压。为了比较分析,同样用Matlab做二次线性拟合,拟合的端电压平均值与转速关系曲线如图3(b)所示。相关系数R-square:0.986 7。 [p]
3.1.2 原因分析
比较图3(a)可知,当转速在0~1 500 r/min和4 000~5 000 r/min,端电压平均值与转速间存在的非线性,用二次曲拟合如图3(b)所示,拟合相关系数较高。由图3(a)可见,当电机转速为0时电机两端电压平均值约为1.3 V。这是因为电机处于静止状态时,摩擦力为静摩擦力,静摩擦力是非线性的。随着外力的增加而增加,最大值发生在运动前的瞬间。电磁转矩为负载制动转矩和空载制动转矩之和,由于本系统不带负载,因此电磁转矩为空载制动转矩。空载制动转矩与转速之间此时是非线性的。电磁转矩与电流成正比,电流又与电压成正比,因此此时电压与转速之间是非线性的。
当转速在2 000~4 000 r/min线性关系较好,占空比的微小改变带来的转速改变较大,因此具有较好的调速性能。这是因为随着运动速度的增加,摩擦力成线性的增加,此时的摩擦力为粘性摩擦力。粘性摩擦是线性的,与速度成正比,空载制动转矩与速度成正比,也即电磁转矩与电流成正比,电流又与电压成正比,因此此时电压与转速之间是线性的。当转速大于4 000 r/min。由于超出了额定转速所以线性度较差且调速性能较差。此时用二次曲线拟合结果较好,因为当电机高速旋转时,摩擦阻力小到可以忽略,此时主要受电机风阻型负荷的影响,当运动部件在气体或液体中运动时,其受到的摩擦阻力或摩擦阻力矩被称为风机型负荷。对同一物体,风阻系数一般为固定值。阻力大小与速度的平方成正比。即空载制动转矩与速度的平方成正比,也即电磁转矩与速度的平方成正比,电磁转矩与电流成正比,电流又与电压成正比,因此此时电压与转速之间是非线性的。
3.2 占空比与端电压平均值关系
3.2.1 实验结果
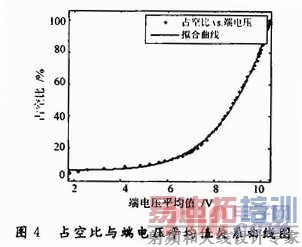
拟合占空比与端电压平均值关系曲线如图4所示。相关系数R-square:0.998 4。拟合曲线方程为:
![]()
如图4所示,占空比与端电压平均值满足抛物线方程。运用积分分离的PID算法改变电机端电压平均值,可以运用此关系式改变占空比,从而实现了PWM调速。
 [p]
[p]
用示波器分别测出电压的顶端值Utop与底端值Ubase,端电压平均值Uarg满足关系式:
![]()
其中:α为占空比。
正是由于所测得的电机端电压底端值Ubase不为0,所以得出的占空比与端电压平均值之间关系曲线为抛物线。若将电机取下,直接测L298的out1与out2输出电压。所测得的电机端电压底端值Ubase约为0,所得的占空比与端电压平均值满足线性关系,即令式(4)中Ubase为0,式(4)变为:
![]()
3.2.2 原因分析
将电机取下后,直接测L298的输出端之间的电压,占空比与端电压平均值满足关系式(5),说明整个硬件电路的设计以及软件编程的正确性。从电机反电势角度分析,当直流电机旋转时,电枢导体切割气隙磁场,在电枢绕组中产生感应电动势。由于感应电动势方向与电流的方向相反,感应电动势也即反电势。直流电机的等效模型如图5所示。图5(a)表示电机工作在电动机状态。图5(b)表示电机工作在发电机状态。
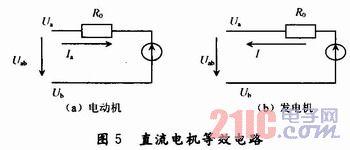
如图5(a)所示,电压平衡方程为:
![]()
式中:U为外加电压;Ia为电枢电流;Ra为电枢绕组电阻;2△Ub为一对电刷接触压降,一般取2△Ub为0.5~2 V;Ea为电枢绕组内的感应电动势。电机空载时,电枢电流可忽略不计,即电流Ia为0。空载时的磁场由主磁极的励磁磁动势单独作用产生。给电机外加12 V的额定电压,由(6)可得反电势:
![]()
以40%的占空比为例,电机端电压Uab是测量中的电压平均值Uarg,其值为8.34 V,测量中的电压底端值Ubase约为7 V。由式(7)可得Ea的值范围应在6.34~7.84 V。由图5(b)可见,此时Uab的值是测得的底端值Ubase即电机的电动势Ea为7 V。
当PWM工作在低电平状态,直流电机不会立刻停止,会继续旋转,电枢绕组切割气隙磁场,电机此时工作在发电机状态,产生感应电动势E。
![]()
式中:Ce为电机电动势常数;φ为每级磁通量。由于电机空载,所以图5(b)中无法形成回路。用单片机仿真软件Proteus可直观的看出在PWM为低电平状态,电机处于减速状态。低电平持续时间越长,电机减速量越大。正是由于在低电平期间,电机处于减速状态,由式(8)可知,Ce,φ均为不变量,转速n的变化引起E的改变。此时Uab的值等于E的值。电机在低电平期间不断的减速,由于PWM周期较短,本文中取
20 ms,电机在低电平期间转速还未减至0,PWM又变为高电平了。这样,就使测得的Ubase值不为0。以40%的占空比为例,当PWM工作在低电平状态,测得Ubase的值约为7 V。由式(8)可知,当正占空比越大,转速也就越大,同时减速时间越短,感应电势E的值越大。所以Ubase的值也就越大。
4 结语
重点分析了直流电机PWM调速过程中控制电压的非线性,对非线性的影响因素做了详细的分析。由于PWM在低电平期间电压的底端值不为0,导致了占空比与电机端电压平均值之间呈抛物线关系。因此,可用得出的抛物线关系式实现精确调速。本系统的非线性研究可为电机控制中非线性的进一步研究提供依据,在实际运用中,可用于移动机器人、飞行模拟机的精确控制。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
