- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于TMS320F2812物探GPS接收机设计与实现
录入:edatop.com 点击:
摘要:设计了一种专门用于物探测量且经济实用的GPS接收机。该接收机采用TI公司的TMS320F2812芯片为核心处理器,对GPS-OEM板进行二次开发,给出了详细的软硬件设计思路和实现方案。测试结果表明,在天气情况良好的条件下,单机定位精度小于1 m,能够满足大多数物探平面测量精度要求。
关键词:地球物理勘探测量;GPS-OEM;TMS320F2812;GPS接收机
0 引言
地球物理勘探野外工作在进行地球物理场测量的同时,需进行点位及其高程测量。GPS定位技术与常规测量技术相比,具有观测站间无需通视、速度快、测量组人员投入少等优势,已成为物探测地工作首选。
地球物理勘探测量中,要求平面定位精度小于3 m。目前,市场上低价格GPS接收机的精度不能保障;高精度GPS接收机可满足精度要求,但价格昂贵。为满足地球物理勘探测地需求,地球物理勘探者往往必须选用高精度GPS接收机,显然增加了测地工作的成本。针对目前GPS接收机发展现状,本文旨在研制一种专用GPS接收机,要求价格适中、能实时定位、且在短时间内单机定位精度能达到1~3 m,满足大多数地球物理勘探测地精度需求。
数字信号处理器DSP运算速度高,有较高的数字信号处理能力,高可靠性的特点,非常适于GPS实时信号的处理。利用GPS-OEM进行二次开发,设计相应接口软件、适配显示器、键盘等用户终端与控制处理器,构成GPS一体化接收机,已成为一种发展趋势。通过调研,选用一种GPS-OEM板,与一种蝶形接收天线配合使用时,单机定位精度能达到1m左右,为进一步设计提供了基本依据。
1 系统硬件设计
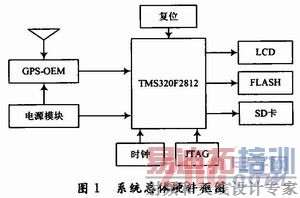
该接收机由GPS数据接收单元、核心处理单元、及存储和显示单元三部分组成。其中,GPS数据接收部分采用选定的GPS-OEM板设计,核心处理单元采用TI公司的DSP,接口部分主要由转换芯片及相应软件组成。所设计的系统总体硬件框架如图1所示。
1.1 GPS数据接收模块设计
目前在市场上GPS-OEM模块种类较多,在选型时要根据:
(1)设计系统所能达到的定位精度;
(2)数据链路的通讯方式和覆盖范围;
(3)性能价格比等因素来选择合适的OEM模块。
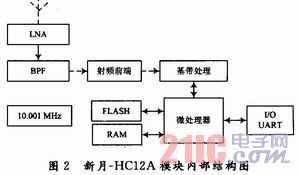
经权衡比较,设计采用合众思壮公司在2006年正式推出的一款GPS-OEM模块新月-HC12A。该模块是合众思壮公司生产的一款单频12通道接收机,采用了最新的ASIC芯片和Coast等专利软件算法,同时具有20Hz的原始数据、定位数据更新率,信标接收功能,差分基准站/移动站,L-Dif,E-Dif,1 pps/Event Marker等多种功能,其单机定位误差小于2.5 m(2DRMS),代表了当前GPS行业的最新技术趋势。
新月-HC12A模块主要由低噪声下变频器、信号通道、微处理器、存储器等组成,其内部结构如图2所示。
另外,根据天线的供电电压、信噪比(噪声系数1.5 dB左右)及增益(增益28 dB左右),选用了右旋极化陶瓷介质天线,该GPS信号接收天线具有在同一时刻观测到较多GPS卫星数、快速定位的特点。 [p]
1.2 DSP核心处理模块设计
为满足接收机系统具备定位速度快,可靠性高及实时性的要求,选用DSP芯片作为中央处理单元的核心,根据中央处理单元对运算量的需求数据本身结构(要求处理的有效数字最大为11位),综合考虑DSP芯片的运算速度、运算精度、DSP芯片的硬件资源及开发工具、功耗及价格等因素。
选用了TI公司的TMS320F2812芯片作为主处理器,主要基于以下几点考虑:
(1)它的主频高,时钟频率可达150 MHz,可以满足系统的需要;
(2)本身具有的大容量片内FLASH可方便系统实现、降低成本;
(3)有着较多通用I/O口可以灵活配置,可以很方便地实现与其他器件接口;
(4)TMS320F2812芯片系统采用高性能静态CMOS技术,功耗非常低。
1.3 存储、显示和控制单元
为了能实时提供给用户定位信息,本文设计中采用LCD液晶显示屏和SD卡存储器作为人机对话窗口。能实时、快速地输出定位信息,通过软件编程设计了简单方便的、友好的人机操作界面。测量时可按照简单的操作提示进行。另外,还可以将必要的数据存入SD卡存储内部设备,方便后续查询。
2 系统软件设计
本文所设计的软件程序采用C语言和汇编语言进行混合编程,对每一个功能模块的子程序进行编译和调试。程序设计主要部分包括:主程序部分;接收子程序;数据处理子程序;存储部分子程序。所设计的具体软件流程如图3所示。
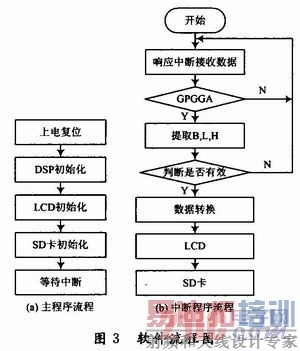
(1)主程序部分:主要完成DSP的CPU初始化、建立中断向量表、SD卡初始化、给OEM板初始化等,还有对各个子程序进行调用。
(2)接收子程序:使程序指向接收数据缓冲区首地址,让DSP处于读接收状态。当新月-HC12A OEM板接收到一帧信号时,就引串口接收中断,将中断信号送给DSP的中断控制器,在其判断中断源后,DSP就会找到与之相应的中断服务程序的入口地址。采用中断方式接收OEM板发送过来的数据,一直等待接收到的字符是一帧数据的有效开始字符,判断特征字“$GPG-GA”后再接收信息内容,若符合就接收;否则就放弃,再重新判断。当接收到在收到“<CR><LF>”字符后结束接收,将结尾字符前的所有字符依次保存到一个接收缓冲数组内,并在接收完一帧数据后,调用数据处理子程序。
(3)数据处理子程序:先缓冲接收到的数据,将接收到的有效帧数据进行提取和转换处理,以“,”为标记进行分离数据分别,提取并判读第1,2,4,9个逗号,就能提取到对应的时间、经度、纬度、高度等信息。所得到的经纬度的信息是ddmm.mmmmm格式,其是字符型需要转换成十进制的。另外,由于时间标准的不同,要得到北京时间还需对提取的时间信息进行转换处理。若需要坐标转换则应调用坐标转换子程序。处理完后将有用的信息送至LCD显示。
(4)存储部分子程序:对于收到的数据,提取处理后,将数据存放到缓存中,当缓存中存满512 b后,就将其写入到SD卡里,以备事后处理。
3 测试结果分析
3.1 静态测试方案与分析
将GPS天线用三角架放置在楼顶上,进行了4次天线在不同位置的实验,所有静态点的数据采集时间均持续5 min(300个数据点),记录每个时间段对应的位置数据的文件。提取其中标准点的经纬度信息,可得到其位置分布如图4所示。
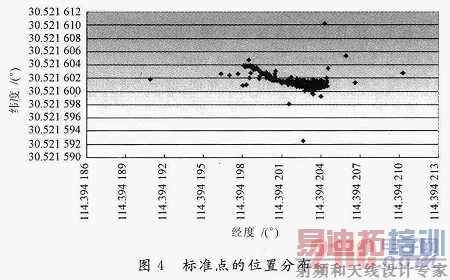
从图4可以清楚地看出,虽然存在一些离群点,但是数据的密集程度还是比较高。经计算,经度方向主要集中在114.394 196°~114.394 205°,相差大约在O.000 009°(O.863 2 m);纬度方向主要集中在30.521 599°~30.521 604°,相差只是大约在O.000 005°(0.554 7 m)。从以上数据分析结果来看,在天气情况较好的情况下,单点定位的平面误差小于1 m。 [p]
CEP分析:为了对厂家所标定的(单机定位:小于2.5 m(2DRMS))指标进行检验,在天气晴朗的条件下,对采集的4个点的实测数据,利用计算圆概率误差的方式进行了分析;其中,每个点的测试时间为5 min,各得到300个数据点。计算得到圆概率误差半径,采用Matlab软件编程作图得到圆概率半径图,如图5所示,只列出一个图。
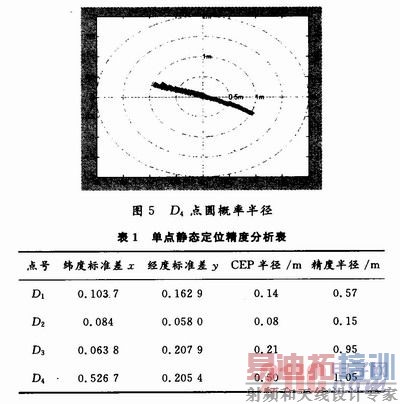
由图5可见,所测的点都包含在半径为1.05 m的圆内,具体计算的各个点的定位实验数据见表1所示。
从表1可知,所测数据中精度半径最大的为1.05 m。而各个点的圆概率误差半径(CEP)最大值为o.5 m,这些数据小于接收机的标定位置精度1.042 m(CEP)(由2.5 m(2DRMS)换算来)。
3.2 动态测试方案与分析
为了在运动中检验测量精度设计了本项实验。实验地点在西操场上,沿预操场的第一跑道和第三跑道绕行一周后回到原点,分别进行4次实验。绕行过程中保持匀速。对所采集的数据进行提取、转换处理后,用Matlab软件对数据进行仿真,将实测经纬度换算成距离单位后,画出4次实验的轨迹图见图6。
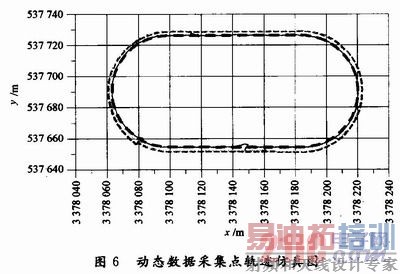
图6中,里面两圈是在第一跑道线上,外面两圈是在第三跑道线上的轨迹图,每条跑道宽1.2 m,这两条线间的距离为2.4 m。虽然在行走过程中所得到的轨迹点与直线轨迹存在误差,但是大致上还是比较理想的。实验轨迹相距最大偏离距均在1 m以内,与静态定位精度基本一致。
分析其中最大偏差部分析其存在误差的主要原因是:在行走过程中,由于不能始终保持天线在一个水平面上,以及未能保证行走的路线完全重合所造成的。总体来讲,该定位轨迹图能较好地反应实际的形状。说明该GPS模块动态定位性能还是比较好的,可以用于较准确的实时导航。
综合静态和动态测试结果表明,使用的新月-HC12AGPS模的圆概率误差半径(CEP)最大值为0.763 9m,小于其标定位置精度1.042m(CEP),说明厂家提供的精度参考值可靠。
所得到的单点的精度半径(100%点)约2m,小于生产厂家给的(2.5m),说明该模块可以满足多数情况下物探测网的平面测量精度要求,表明系统设计方案可行。
4 结语
本文通过对整个接收机系统的研究和设计,主要得到以下结论:
(1)所选用的GPS-OEM定位精度能满足设计需求。在配合使用右旋极化陶瓷介质天线进行的单机静态测试结果表明,单点定位精度小于1m,由4次动态测试可得该接收机的导航的最大偏差也在1 m左右,能满足大多数地球物理勘探的平面测量精度要求。
(2)设计GPS接收机系统的整体思路是正确的。选用中低档的GPS-OEM来设计实现单点定位精度较高、价格适中的GPS接收的思路是正确的,实现了用中低档GPS-OEM和较好的接收天线来研制高精度GPS接收机的设想,也为后续的设计者提供了借鉴。
(3)提出的整体的设计方案是可行的。选用DSP芯片和GPS-OEM板开发GPS接收机是可行的,能达到实时定位的功能要求;选用的TMS320-F2812DSP芯片能满足实时性的要求。其中所设计的DSP模块电路可以能满足系统要求。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:X射线检测仪控制系统的设计
下一篇:多通道数字接收机的设计与实现
射频和天线工程师培训课程详情>>
