- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于加速度回路的天线随动系统控制器设计
录入:edatop.com 点击:
摘要:为了解决天线随动系统所存在的振颤现象和全数字化实现等问题,介绍了一种基于加速度回路的全数字化天线随动系统控制器,该系统以DSP芯片TMS320F2812为核心控制芯片,采用速率陀螺平台稳定系统、数字PID控制算法和脉宽调制驱动方式,通过引入加速度回路抑制系统的高频振荡,极大地改善了系统的稳定性和动态品质,具有极高的应用价值。
关键词:加速度回路;天线随动系统;平台稳定系统;PID;脉宽调制
0 引言
随动系统亦称为伺服系统,其广泛应用于卫星通信、自动驾驶仪、天线位置控制、导弹和飞船的制导等各个领域。在导弹制导领域中,随动系统的应用极其重要,其涉及到目标准确跟踪、制导精度、作战性能等关键因素,随动系统控制器作为整个导弹制导系统的核心,其性能好坏直接影响着系统的整体性能。
文献提出导引头随动控制系统设计方案,通过理论分析和仿真验证表明,这种随动系统具有较好的搜索和跟踪性能。但是,在实际应用中,由于高频振荡的存在,对随动系统的高跟踪精度和整体性能影响较大。针对这种问题,本文从天线随动系统的控制方案出发,以实现随动系统的快速动态响应特性、高质量的稳态精度和较强的非线性干扰能力为目的,通过仿真详细分析了随动系统的各种功能特性。巧用速度微分即加速度负反馈的方法,引入加速度反馈回路,增加系统阻尼,在减小超调的同时,抑制尖峰干扰,极大地提高了天线随动系统的整体性能。
1 系统结构及工作原理
本系统设计采用内外双框架结构,内框架为俯仰框架,外框架为方位框架。内外框架均安装有直流力矩电机、测角电位计和速率陀螺,由它们共同实现天线的方位和俯仰运动。系统结构如图1所示。
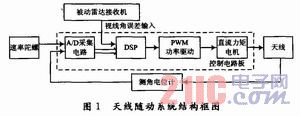
控制系统由测角电位计、速率陀螺、A/D电路、DSP控制器、PWM功率驱动电路、直流力矩电机构成。A/D电路将电位计和速率陀螺输出的模拟信号转换为数字信号,被动雷达接收机作为测角装置给出误差角度信号,在DSP控制器中完成PID控制算法,并给出PWM信号,再经PWM功率驱动电路驱动直流力矩电机,从而完成对天线的全数字化控制。
2 系统设计与仿真
2.1 系统控制原理框图
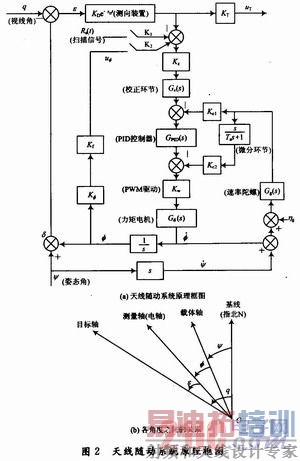
本系统所采用的是速率陀螺稳定平台式天线随动跟踪系统方案,从原理上说,可称为“平台式随动系统”,它既能隔离载体角运动对天线电轴的铰链,又能使天线电轴快速准确地跟踪视线,并且当被动雷达接收机停止工作时,天线电轴能保持在导航坐标系总的指向稳定不变。该方案的控制原理框图以及各个角度之间的关系如图2所示。
[p]
图2中,q为导航系的视线角;e为导航系的误差角;ψ,![]() 分别为载体的姿态角和角速度;
分别为载体的姿态角和角速度;![]() 为载体轴与天线电轴之间的夹角及其角速度;uT,uφ分别为被动雷达接收机、角位置传感器经过放大器KT,Kf的输出电压,它们都要输给载体控制系统;ηg为角速率陀螺仪的漂移;
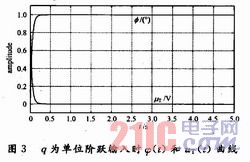
为载体轴与天线电轴之间的夹角及其角速度;uT,uφ分别为被动雷达接收机、角位置传感器经过放大器KT,Kf的输出电压,它们都要输给载体控制系统;ηg为角速率陀螺仪的漂移;![]() 为被动雷达接收机(测向装置)的传递函数,τD为测角延迟时间;GPID(s)为PID调节器传递函数,Gc(s)为校正装置传递函数,其作用为增大系统带宽,提高系统解耦性能,同时超前网络校正环节可以改善系统的φ和uT的输出,减弱输出产生的纹波;Gd(s)为伺服电机减速器及负载的传递函数;Gg(s)为角速率陀螺仪的传递函数,各传递函数表达式如下:
为被动雷达接收机(测向装置)的传递函数,τD为测角延迟时间;GPID(s)为PID调节器传递函数,Gc(s)为校正装置传递函数,其作用为增大系统带宽,提高系统解耦性能,同时超前网络校正环节可以改善系统的φ和uT的输出,减弱输出产生的纹波;Gd(s)为伺服电机减速器及负载的传递函数;Gg(s)为角速率陀螺仪的传递函数,各传递函数表达式如下:
Kφ,Kw分别为角位置传感器的PWM驱动传递系数;Kz,Kc1,Kc2,Kf,KT分别为电子放大器的放大系数。K1,K2为两个开关。当被动雷达接收机开机时,K1,K2同时接通,扫描信号通过K1驱动随动系统,对目标进行搜索;当被动雷达截获目标后,K1,K2同时断开,雷达天线在随动系统驱动下转入对目标跟踪状态,根据被动雷达接收机给出的实时误差角度信号实现对目标的稳定跟踪。
从图2中可以看出,天线随动系统由内至外分别由角加速度反馈回路、角速度反馈回路、角位置反馈回路三个闭环反馈控制回路组成。其中,角加速度回路由PWM驱动、力矩电机、角速率陀螺、微分环节、角加速度反馈放大环节构成,采用对角速率陀螺输出信号微分得到角加速度信号。角速度回路由PID控制器、PWM驱动、力矩电机、角速率陀螺、角速度反馈放大环节构成。角位置回路由测向装置、前置放大器、校正环节和角速度反馈回路连接构成。
2.2 天线随动系统性能分析
本设计通过对各回路元件的理论模型和非线性进行仿真分析,调整相关参数,使其能够达到系统的性能要求,并将仿真得到的相关参数作为软硬件实现的依据。
2.2.1 输出特性
根据线性系统叠加性原理,将图2系统分解为单输入单输出系统进行分析,当q,ψ,ηg同时输入到系统时,可得系统的稳态输出特性为:
![]()
等号右边第一项为随动系统输出到载体控制系统的导引信号,是与视线角速度成正比例的信号;第二项是载体角运动的铰链输出,对载体的控制性能产生了影响;第三项是角速度陀螺仪的漂移造成的干扰输出,将它输入载体控制系统,会造成导引误差,因此要选择漂移小的角速度陀螺仪。
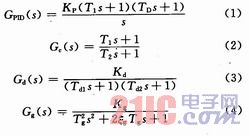
图3给出了当输入q=1(t),ψ=0时,输出φ(t)和uT(t)的曲线。从图中可见,曲线连续平滑,稳态性能较好,并且能够较好地实现![]() 的比例导引规律。
的比例导引规律。
2.2.2 解耦特性
系统的解耦特性主要研究载体角运动及角速度陀螺仪的漂移对天线电轴在导航坐标系统中的位置影响。因此,要分析以ψ,ηg为输入时,对φ的影响。
当以ψ为输入,φ稳态输出特性为:
![]()
由式(6)可知,载体角运动对天线电轴在导航系统中的稳态位置无铰链,系统各元件参数变化都不会影响天线电轴在导航系统中位置。说明该系统具有全解耦功能。
2.2.3 抗关机特性
抗关机特性主要研究当目标雷达关机后,载体角运动、角速度陀螺仪的漂移对天线电轴在导航系的位置的影响。
由式(7)可知,当目标雷达关机后,载体角运动不影响天线电轴在导航系统中的位置,能保持目标雷达关机前的指向不变。
由式(8)可知,在目标雷达关机后,天线电轴在导航系统中的漂移与角速度陀螺仪的漂移大小相等,方向相反。所以角速度陀螺仪的漂移影响天线抗关机性能,需根据载体在目标雷达关机后需飞行的最长时间来选择角速度陀螺仪的漂移特性。
2.2.4 搜索特性
搜索特性分析是指当随动系统在搜索状态下,以R。(t)和![]() (t)为输入,φ(t)为输出时的特性。其稳态输出特性为:
(t)为输入,φ(t)为输出时的特性。其稳态输出特性为:
由此可知,雷达天线能按照给定的信号,在方位和俯仰面上进行要求方式的扫描,扫描的范围由Rs(t)的幅值控制。但由于扫描时,φ与![]() 成比例,故在扫描时载体角速度不能太大,否则天线电轴会丢失目标。 [p]
成比例,故在扫描时载体角速度不能太大,否则天线电轴会丢失目标。 [p]
2.2.5 跟踪特性
图4给出了当输入q=20t,ψ=0时,输出φ(t)的仿真曲线。它表明,当输入20°/s的角速度信号时,跟踪回路能较好地复现系统的输入信号,即电轴可以稳定跟踪视线角,实现高精度跟踪。同时可以看出,φ的输出在过零点时,特性良好,无死区现象。

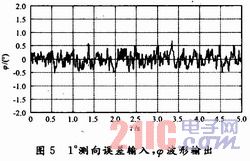
2.2.6 引入加速度回路特性
在天线随动系统中增加的角加速度负反馈回路,不但可以用于抑制系统的高频振荡,解决随动系统的颤振问题,而且能克服惯性平台的“航向效应”,提高了电机参数的鲁棒性,使平台式随动系统的性能更加可靠。图5给出了输入标准差为σi=0.33时,取Kc2=1.2,加速度回路起反馈作用,输出标准差σo=0.21。它表明天线随动系统的φ角度输出得到平滑。取Kc2=0,加速度回路不起反馈作用时,输出标准差σo= 0.23。可见,加入加速度反馈回路可以进一步降低φ的输出振荡。
3 系统实现
3.1 系统硬件实现
本系统是采用以DSP为核心控制芯片的数字控制系统,通过天线随动系统,对采取的控制方案的性能进行实测验证。考虑到在天线随动系统中,天线的负载大,扰动负载力矩较大,系统选用永磁式直流力矩电机,它是一种低转速、大力矩的直流电动机,可以直接带动低速负载和大转矩负载,具有转速和转矩波动小,机械特性和调节特性线性度好等优点,根据给定的参数,选取力矩电机的堵转转矩为3.7 N·m,电气时延为T≤0.93 ms。测角电位计选用精密塑料电位计MidoriCPP-35型,有效电气角为340°,速率陀螺选用单自由度液浮陀螺JST-1,它具有漂移小,零位及重复性好,频率宽的特点。
随动系统控制器的硬件结构主要包括A/D采样电路模块、DSP和FPGA控制电路模块、PWM功率驱动电路、SCI串口通信电路、供电电源等模块。系统硬件结构如图6所示。
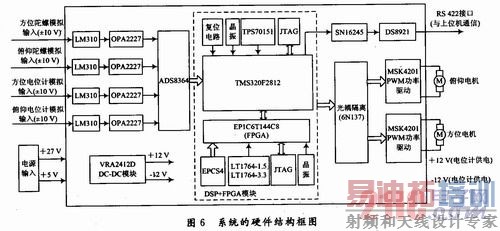
系统以TI公司生产的TMS320F2812芯片为核心处理器,主要完成速率陀螺模拟信号采集、电位计模拟信号采集、PWM信号产生、数字PID控制算法、搜索回路算法、跟踪回路算法、与上位机的RS 422接口串行通信的实现以及系统工作状态的转换等功能。 [p]
系统选取Cyclone系列的EP1C6T144FPGA芯片来实现对DSP和ADS8364各个功能引脚逻辑的灵活控制。作为系统前端数据采集的核心,选取TI公司的ADS8364芯片完成速率陀螺和电位计的信号采集工作。此外,为了保证信号的稳定性,在A/D前端加入射频电路芯片LM310。
系统采用PWM工作方式驱动直流力矩电机,由TMS320F2812产生PWM控制波形,然后由PWM功放MSK4201进行功率驱动,产生力矩电机所需要的驱动电流。MSK4201是一款完整的H桥电路,它可以用来驱动DC有刷电机或作为D类开关放大器,所有的高低驱动控制电路在内部集成,用户提供TTL兼容PWM信号,同时振幅和方向控制四象限模式,内部驱动电路提供适当的死区时间来保护每个半桥,全N沟道场效应管意味着两方面的阻力和交换能力效率的最佳模式。
同时,为了保证PWM驱动电路与DSP电路的之间的干扰减至最小,在系统设计中,采用光耦隔离芯片6N137将二者隔离。
系统与上位机的通信采取异步串行通信方式,RS 422接口芯片采用DS8921。同时采用SN74ALVTHl6245芯片避免回流,提高数据传输的稳定性。
3.2 系统软件实现
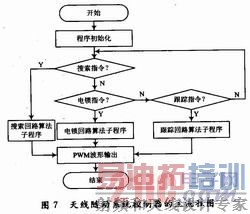
本系统采用数字PID控制算法,由TMS320F2812的事件管理器(EV)产生周期为0.1 ms的PWM波形信号,同时采用CPU定时器以1 ms的控制周期,控制驱动力矩电机实现天线转动。系统首先对DSP内部时钟模块、PIE模块、SCI模块、事件管理器等模块进行初始化,之后启动SCI模块,通过指定的通信协议,等待接收上位机的命令。当上位机发出启动伺服命令后,电机上电,控制天线保持零位电锁状态;当上位机发出搜索命令时,进入搜索回路子程序,天线从零点开始进行步进式搜索,当被动雷达天线发现到目标后,程序切换到跟踪回路子程序,由雷达数字接收机给定实时误差角信号,使天线进入目标跟踪状态。若目标丢失,则天线立即切换到搜索状态重新进行目标搜索。天线随动系统控制器的主流程图如图7所示。
4 实验结果分析
实验以方位通道为例,对天线转动过程中的电位计采样数据整理分析如下,图8为角加速度回路引入系统前后对比曲线,通过比较可知,二者均是天线由0°转到20°的数据曲线,响应速度快、动态性能较好,没有明显的超调现象,总体输出良好。但是图8(a)表现出系统
存在一定的高频振荡,图8(b)表现出系统在引入角加速度回路负反馈后,随动系统的整体性能得到了很好的改善,抑制了尖峰干扰,数据输出曲线更加平滑,系统性能更加可靠。
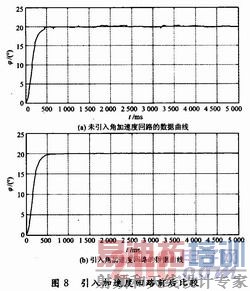
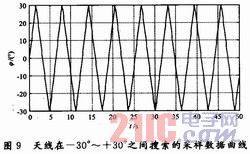
图9为天线在-30°~+30°范围内搜索的数据曲线,搜索曲线平稳连续,表明天线能够较好地实现步进式搜索。
5 结论
通过理论分析和硬件验证,所设计的基于加速度回路的天线随动系统具有精度高、稳定性好、结构简单等特点,引入角加速度回路后,可以很好地改善系统的跟踪精度,同时能够很好地抑制天线随动系统普遍存在的震颤现象,提高系统的稳定性,是一种高精度、弱耦合、抗目标丢失、快速平稳、可实现比例导引的随动系统。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:通用LED驱动控制器的应用
下一篇:实现汽车内部照明的新途径
射频和天线工程师培训课程详情>>
