- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
用CPLD实现嵌入式平台上的实时 像增强
录入:edatop.com 点击:
提出了在嵌入式平台上用CPLD实现实时图像增强算法的解决方案,并加以实现。重点讨论了经过改进的图像增强算法以及使用CPLD实现的具体方法,介绍了所采用的嵌入式平台的总体结构。
通常,在拥有DSP或FPGA的嵌入式平台上,有关图像信号处理的算法部分都由DSP和FPGA完成。但是相对于标准的PC平台来说,嵌入式平台的资源有限得多,而且由于成本的原因,中央处理器的速度也通常无法与PC相比。因此,在PC机上用软件可以轻易实现的图像处理算法,完全移植到嵌入式平台上就要颇费一番周折了。
为了达到实时图像处理的目的,除了最大限度地发挥中央处理器的图像处理能力外,还需要合理地分配任务。DSP芯片的优势在于乘除运算的能力,由于其特殊的流水线结构和处理单元,大部分DSP都能在单周期内完成在PC上需若干个周期才能完成的乘法运算,所以在进行诸如FFT、DCT等运算时优势明显;相反在进行简单的加减运算时,由于时钟频率和总线宽度都无法与PC机相比,效率不高。因此,如果能用硬件实时实现这些相对简单却又繁琐的运算,就可以大大提高系统的总体性能。
1 改进的图像增强算法
图像增强是图像处理中用于改善图像质量以及图像视觉效果的一种方法。在DSP平台上采用直方图均衡实现实时图像增强是一种常用的方法。对一幅连续图像,其具有灰度G的阈值面积(所有轮廓线所包围的面积)为A(G),则其直方图H(G)定义为:
H(G)=lim[A(G+ΔG)-A(G)/ΔG=d/dcA(G),
ΔG→0
对于数字图像,G为整数,A(G)表示灰度值大于等于G的象素个数,当ΔG=1,H(G)=A(G+1)-A(G)。 [p]
如果对A(G)做一次系数为Gm/A0的比例变换,Gm表示灰度的最大值,A0表示图像的面积(在数字图像中为象素总数)。这就是种线性直方图均衡。这种直方图均衡的具体实现如下:
(1)对于图像{Pi,j|i=1,2,...,n;j=1,2,...,m},就灰度G,G=0,1,...255,求出直方图H(G);
(2)由A(G+1)=A(G)+H(G)求出阈值面积A(G),G=1,2,...,255;
(3)求出变换后的灰度分度值hnew(G)=255 A(G)/A0,A0=nm;
(4)Pij=hnew(Pij)。
借助LUT,可使运算以最快速度实现。
考察直方图均衡的实现过程可以发现,这是一种有限区间内的单调变换。从其频域特性看,直方图均衡改变了已有频率成分的分布,使它们分布得更加均匀,但并不增加新的频率成分。直方图均衡对于彩色(灰度)值集中在低端的图像,可起到较明显的视觉改善作用。但对于那些色彩分布很不均匀、频带较窄,特别是整体偏亮的图像,效果就不明显了。
本文采用一种新的图像增强方法,将对图像的边缘增强处理与均衡结合起来,并且这些运算最终可由硬件实现。 [p]
对于连续图像P,其局部边缘可由对应空间梯度的幅值
,取其一阶近似ΔPi,j=2Pi,j-Pi,j-Pi-1,j,可得图像{Pi,j|i=1,2,...,n;j=1,2,...,m}在(i,j)的边缘信息。
如果不计Pi,j的取值范围,可直接对图像{Pi,j|i=1,2,...,n;j=1,2,...,m}进行修正:
P′i,j=Pi,j+ΔPi,j,
其中,P′i,j表示Pi,j修正后的值。显然,图像{Pi,j|i=1,2,...,n;j=1,2,...,m}按此规则修正后边缘值的变化更为强烈,边缘更为突出,可达到边缘增强的效果。同时,由于在原图像上叠加了梯度值,使得修正后的图像的频谱有一定的扩展。但由于没有对Pi,j的取值作约束, 这样处理后的象素值可能会溢出,例如对于每个色彩通道为8位的图像,处理后的数值可能会大于255或小于0。因此,通常要对其进行归一化处理,即:
Pnew=255%26;#215;(P′-P′min)/(P′max-P′min)。
但用硬件实现乘除运算可能会占用很多资源,上述公式即便以运算实现都是很不经济的。本文采用预拉伸加饱和/截止的方法,在不牺牲频率特性的基础上达到减少计算量的目的。
考察ΔPi,j与Pi,j的直方图,分别取得它们的右峰值所对应的横座标,记为GΔ和G,并找到k,使得kGΔ+G=255,则修正公式变为P′ i,j=Pi,j+kΔPi,j。其中kΔPi,j可以LUT实现。修正后的P′i,j可在[0,255]上进行饱和/截止运算。
2 用CPLD实现实时的图像增强
本文所采用的改进图像增强算法的主要成份是差分、累加以及饱和/截止。这些运算都是加减法及逻辑运算,都属于ALU的简单操作,适合硬件实现。本文采用 CPLD实现所提出的算法。以对具有30fps的1280 1024 RGB图像计算ΔPi,j为例,每计算一点ΔPi,j需要4次加(减)运算,即总的需要1280 1024 5;3 30 4=471,895,200次加(减)运算。如果采用的DSP的速度是100MHz,且假定所有运算都是单周期的,则仅仅该运算就需要4.7s!所以采用 CPLD实现某些运算是必需的。
图3 图像增强算法的硬件实现结构
采用CPLD实现运算(例如边缘处理中涉及的求梯度运算),还需解决数据的暂存问题。本文以一片高速SRAM作为数据缓冲区。由于图像数据的采样输入的频率也很高,需要充分合理地安排好每一次操作的时序,充分利用已参与运算的数据及中间结果,减少数据进出SRAM的次数。
2.1 基于E1-DSP的网络图像采集平台
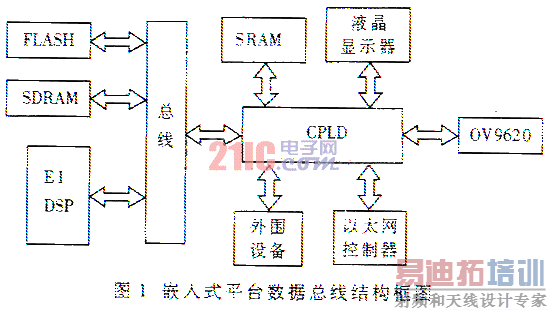
在分析具体实现方法前,先简要介绍所采用的硬件平台。该平台主要用于远程图像采集和以太网传输,其图像通道结构如图1所示。
OV9620是CMOS的数字图像传感器,负责采集连续的数字图像;中央处理器使用德国HYPERSTONE公司的E1系列RISC DSP,它集DSP和RISC于一身,可以加载OS,方便地实现任务调度、内存管理等功能,大大提高系统的总体性能;CPLD的基本功能是作为E1总线接口控制模块,本文还将用它实现图像增强运算。
2.2 算法的总流程
为了实现实时的读写和运算,需要由外部电路产生24MHz%26;#215;4的时钟EXCLK作为读写时钟,所有时序都由CMOS时钟和EXCLK控制,可以做到完全同步。具体流程如图2所示。
(1)在CMOS时钟到来时,从CMOS传感器的数据输出口采集Pi,j,并实现加法运算RESULT=Pi,j+Pi,j,同时用EXCLK的第0个时钟向SRAM写入P′i,j-1或P′i,m-1 (本行最后一个数据,下一次操作应换行);
(2)在EXCLK的第1个时钟锁存RUSELT,由SRAM读入Pi-1,j,并做减法运算RESULT=RESULT-Pi-1,j;
(3)在EXCLK的第2个时钟锁存RUSELT,由SRAM读入Pi,j-1,并做减法运算RESULT=RESULT-Pi,j-1;
(4)在EXCLK的第3个时钟锁存RUSELT,同时写入Pi,j。 [p]
然后开始下一个点的运算。
2.3 硬件实现的逻辑结构
用CPLD实现该算法所采用的逻辑结构如图3所示。
其中加模块实现25;Pi,j运算,生成9位的运算结果交给减模块;减模块在EXCLK的第二和第三个时钟分别读入Pi-1,j和Pi,j-1进行减法运算,并把结果存回result寄存器。由于两次减法在时间上是错开的,因此只需要一个减法器就够了,节约了内部资源。
图3中的脉冲计数器是一个模4计数器,所有的读写时序和运算时序都由它控制。数据通道切换模块控制流入result寄存器的数据流,在第一个EXCLK时钟让加法器的结果进入result,其余的时间都让减法器的结果进入result。两个选通逻辑模块对EXCLK起门控作用,选通逻辑1允许第1个和第2 个时钟通过,用来锁存从SRAM读入的数据;选通逻辑2允许第1、2、3个时钟通过,用来锁存三次运算的结果。
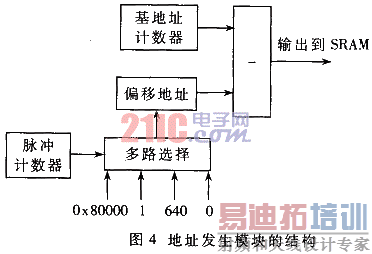
SRAM的读写操作由地址发生器和读写控制模块共同实现。由于四次读写操作的地址都不同,且不连续,无法用普通的地址计数器实现。这里采用地址计数器加偏移的相对寻址法,具体结构如图4所示。
地址计数器中保存Pi,j的地址,它由cmos clk作为时钟实现累加;偏移地址则由脉冲计数器模块控制,分别选择P′i,j-1、Pi-1,j、Pi,j-1和Pi,j的偏移地址;最后做减法运算得到绝对地址送到SRAM。
通过上述设计和优化,完全可以在结构和功能都比较简单的CPLD上实现实时的图像增强处理。
由于采用了改进的图像增强算法,在处理窄频带的图像时收到了非常好的效果,部分测试结果如图5所示。
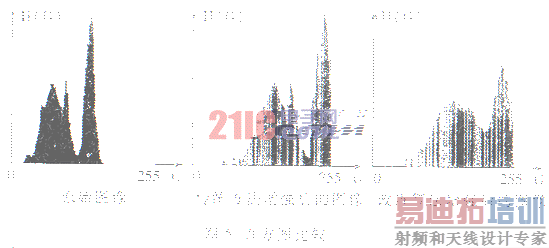
与传统的处理方法相比,改进后的算法对图像的均衡效果更为明显一些,而且由于展宽了频带,图像的细节更加丰富,图像更加明艳和清晰。
以上算法都在CPLD上实现,并没有占用DSP的处理时间,因而节省了大量的运算时间。笔者做过一个实际测试,在100MHz主频的E1 DSP上用C编程实现一帧640 480 RGB图像的增强算法大约需要100ms(如果用汇编语言编程或对程序作优化可使性能提高一些),而且要占用大量存储资源。这样的运算速度只适合静止图像的处理。所以,如果不做简化处理或采用更高性能的DSP,根本无法做到实时处理。由此可见,采用硬件处理的方法可以极大地提高系统的总体性能。
综上所述,在拥有DSP的嵌入式平台上使用CPLD实现改进的图像增强算法是可行的,对于实时的图像处理是一种高效的解决方法。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
