- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于TMS320LF2407A 和AT89S52 三相异步电机双闭环调速控制系统设计
录入:edatop.com 点击:
摘 要: 针对某装备中三相交流异步电机调速的要求, 以TMS320LF2407A 和AT89S52 为核心采用磁场定向控制策略设计了一电流、转速双闭环调速控制系统, 给出了硬件原理框图、关键器件、设计思想和程序流程图。实验结果表明, 该控制系统具有动态响应快, 控制精度高, 实时显示, 数据存储, 抗干扰强等优点。
0 引 言
三相交流异步电机以其结构简单, 体积小, 重量轻,价格低, 维修方便等优点, 广泛应用于武器装备、给料系统、数控机床、柔性制造技术、各种自动化设备等领域,其转速控制系统性能的优劣直接决定了设备性能的发挥。随着高性能微处理器及新型电力电子器件的出现,使得应用全控型电力电子器件和空间矢量( SVPWM)控制技术进行变频调速的方式已成为交流电机调速控制的主流。
相对于其他微处理器, DSP 具有运算速度快, 可以自己产生有死区时间的PWM 输出, 可以实现诸如模糊控制等复杂的算法, 外围硬件少等优点, 因而广泛用于电机的数字控制。本文以TMS320LF2407A DSP 芯片和AT89S52 单片机为核心, 设计了针对三相交流异步电机的全数字调速控制系统。实验结果表明, 该系统具有实时显示, 数据存储, 动态响应快, 控制精度高, 抗干扰性强等优点。
1 TMS320LF2407A简介
TMS320LF2407A 主要包括算术逻辑运算单元( CALU) 、寄存器集、辅助算术逻辑单元( ARAU) 、乘法器、乘法移位器、累加器、加法移位器、时钟锁相环电路、两个完全等同的事件管理器A, B( 包括通用定时器、比较单元、捕获/ 正交编码器脉冲电路) 、内部A/ D 转换器、双串口、看门狗、CAN 总线电路单元等。
TMS320LF2407A 采用先进的哈佛结构, 流水线作业, 在30 MHz 内部时钟频率下, 指令周期仅为33 ns。
其内部存储器包含2 类RAM 块。一类为DRAM, 另一类为SRAM。对DRAM 而言又划分为3 个RAM块, 即B0, B1, B2, 容量依次为256 字, 256 字, 32 字。这些RAM 全部允许在一个指令周期内访问两次, 因此在数据处理能力上有显着的增加。同时, B0 块还可以通过程序动态地配置为数据存储器区或程序存储器区。
若配置为程序区可在上电时把浮点算法子程序或者数据表从外部慢速EPROM 装入此区域, 从而缓解高速处理器与慢速外设之间的矛盾, 这对提高控制系统的动态性能有很大帮助。TMS320LF2407A 内部含有内嵌采样保持的10 位精度、高速A/ D 转换器, 转换时间最短为500 ns ( 采样保持+ 转换时间) 。除此之外TMS320LF2407A 还有丰富的、功能强大的中断系统以及常用的I/ O 接口, 这些都使设计调速控制系统时的硬件电路得到简化。
2 系统硬件设计
基于T MS320LF2407A 三相交流异步电机双闭环调速控制系统硬件框图如图1 所示。
系统硬件框图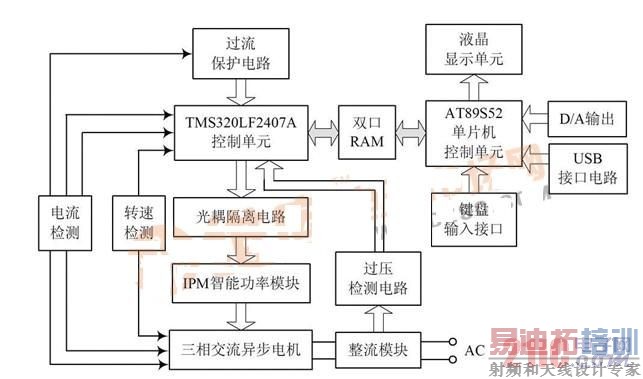
图1 系统硬件框图。
系统主电路采用交直交电压型变频器, 功率器件采用智能功率模块IPM。该模块包含了6 个IGBT 和6 个与IGBT 反并联的续流二极管。控制电路部分由AT 89S52 单片机控制单元、TMS320LF2407A 控制器单元、电流检测电路、电压检测电路、转速检测电路、过流保护电路、液晶显示电路和键盘输入接口电路等模块组成。 [p]
2. 1 AT89S52 单片机控制单元:
AT89S52 控制单元主要完成以下功能:
一是通过键盘输入接口完成对给定转速的设定; 二是通过液晶显示单元完成对给定转速、电机启动时转速和达到稳态时转速的显示;三是完成对双口RAM 中存储数据的读取,并将读取的数据通过USB 接口电路导入上位机或通过D/ A 输出电路输入到模拟设备。
其中, 液晶显示单元采用中文图形两用型液晶显示模块OCMJ4X8B2; 键盘输入采用矩阵式按键键盘可以通过单片机调用预设的汉字, 可以输入数字( 用来设置转速) ; 双口模块用来存储TMS320LF2407A 采集的变量波形数据。
2. 2 TMS320LF2407A 控制单元
TMS320LF2407A 控制单元的电路原理图如图2所示。该控制单元电路主要包括光耦隔离电路、转速检测电路、电流检测电路和电压检测电路, 分别完成对IPM 的驱动、转速检测与控制、过流保护、过压和欠压保护等功能。
TMS320LF2407A 控制单元电路原理图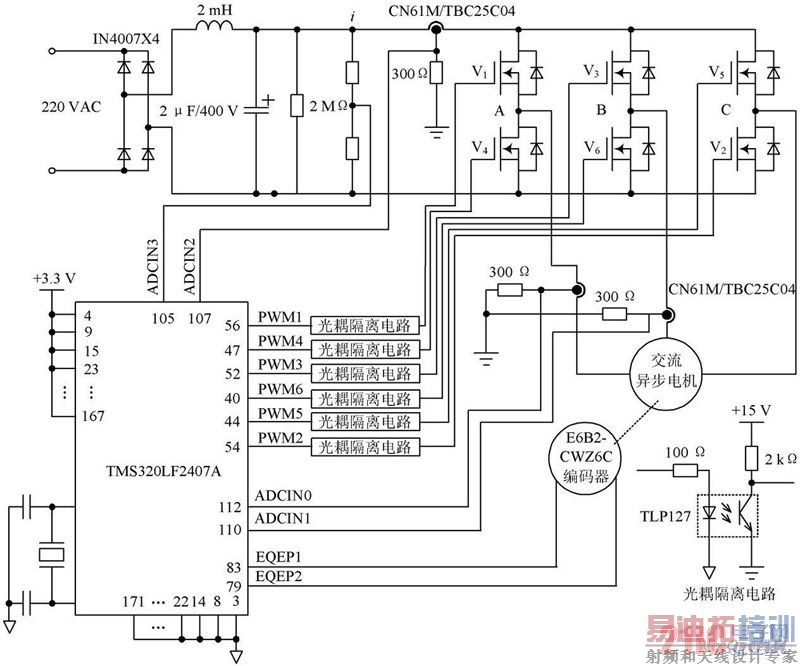
图2 TMS320LF2407A 控制单元电路原理图。
光耦隔离电路由6 片东芝公司的TLP127 及相应的限流电阻组成, 主要完成TMS320LF2407A 与IPM 智能功率模块的电气隔离, 并将输出的PWM 信号放大。 [p]
转速检测电路采用欧姆龙1024 原旋转型线编码器E6B2CWZ6C, 编码器输出的脉冲经过TMS320LF2407A内部4 倍频后可以实现每转4 096 个脉冲, 从而保证了转速的精度。根据采样得到的数据与给定数据比较, 调整DSP 输出驱动脉冲的宽度, 从而调节交流电机的转速。
电流采样电路采用3 片霍尔电流传感器CN61M/TBC25C04, 一路将检测到的直流母线上瞬时电流值送入过流保护电路, 当其值大于过电流值时, 相应过流保护电路动作产生保护信号, 关断PWM 信号的输出; 另外两路检测流过电动机的电流, 通过变换改变DSP 输出的驱动脉冲, 进而保持电机的转速不变。在本文设计的控制系统中, TMS320LF2407A 采用了ADCIN00,ADCIN01和ADCIN02 三路通道, 以采集电机A 相、B 相和直流母线的电流,直流母线的采样电压通过ADCIN03 通道输入DSP, 根据采样得到的数据, 在电压超过设定的上、下限值时, DSP 关断PWM 脉冲的输出, 从而实现过压和欠压保护功能。
3 系统软件设计
3. 1 闭环调速控制的原理
本文设计的双闭环调速控制系统的原理框图如图3所示。
其中, 给定速度由键盘输入接口电路输入AT 89S52单片机控制系统, 速度PI 调节、电流PI 调节、磁场位置角和转速反馈量的计算由TMS320LF2407A 计算实现。
测得的电机转速通过AT 89S52 控制系统输出到液晶显示单元上实时显示。
双闭环调速控制系统框图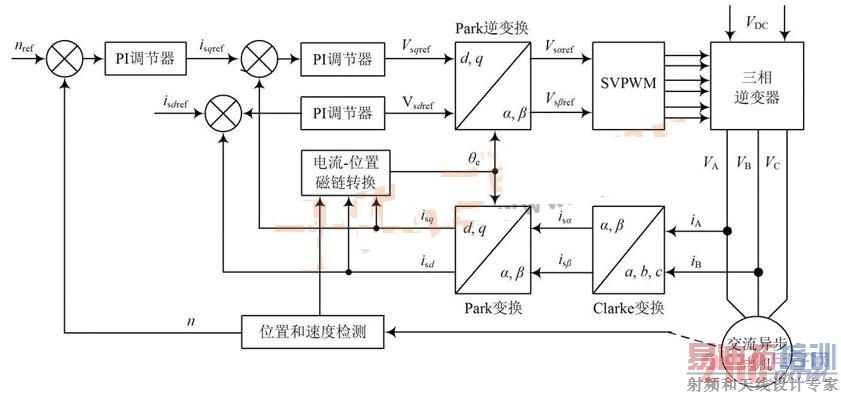
图3 双闭环调速控制系统框图。 [p]
假设电机定转子三相绕组完全对称; 定转子表面光滑, 无齿槽效应, 定转子每相气隙磁动势在空间呈正弦分布; 磁饱和、涡流及铁心损耗均忽略不计, 则三相交流异步电动机的转矩方程如下:
式中: L r , L m 分别为转子自感和互感; p 是微分算子; i sq是定子电流在q 轴上的分量; rd 是转子磁链在d 轴上的分量。
从式( 1) 可以看出, 异步电机的转矩与定子电流矢量和转子磁场以及夹角有关。因此, 要想控制转矩, 必须先检测和控制磁通。当dq 坐标系在同步旋转磁场上且静止坐标系中的各交流量转化为旋转坐标系中对应的直流量时, 使d 轴和转子磁场方向重合, 可得到磁场定向控制方程如下: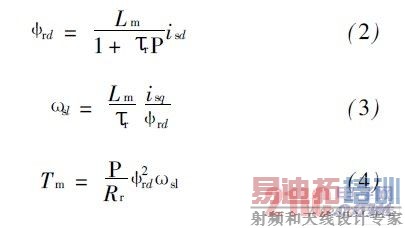
式中: 为漏磁系数; r 为转子时间常数。
为漏磁系数; r 为转子时间常数。
由式( 2) 可知, 检测到定子电流的d 轴分量( 励磁分量) 可观测出转子磁通幅值; 由式( 4) 可知, 当rd 恒定时, 只要控制定子电流的q 轴分量( 转矩分量) , 即可控制电磁转矩。具体工作原理如下:
通过电流传感器测量逆变器输出的定子电流iA ,iB , 经过DSP 的A/ D 转换器转换成数字量, 并利用iC = - ( i A + i B ) 计算出i C。电流i A , iB , i C 通过Clarke 变换和Park 变换得到了dq 坐标系下的励磁反馈电流i sd和转矩反馈电流isq , 与给定的励磁电流i sd ref 和转矩电流i sqref 的差通过PI 调节后, 再经过Park 逆变换输出!
坐标下的电压, DSP 利用该电压生成三相逆变器所需的六路驱动信号。实时测量的电机转速信号一方面用于与给定速度比较产生i sqref , 另一方面进入电流位置磁链转换模型求出磁链的位置, 并用于Clar ke 和Park 逆变换。
3. 2 程序流程图
AT89S52 单片机控制系统上电后,首先通过键盘输入接口输入给定转速, 单片机将给定转速存储在双口RAM 中, 同时, 给定转速通过单片机P0 口输出到液晶显示单元的驱动控制芯片SED1520,由SED1520 驱动OCMJ4X8B2 显示转速, 转速的显示范围为0~ 9 999 r/ min, 然后通过键盘来确定是否要对相关变量采样并存储。该部分程序流程图如图4( a) 所示。
其次给TMS320LF2407A DSP 控制系统上电, 运行初始化程序完成初始状态的设定( 包括对相关变量采样数据存储等) , DSP 控制系统对电机转速和电枢电流采样, 与给定值进行比较, 若达到设定转速, 则循环运行, 当给定转速改变时, 进入中断处理子程序。主程序流程图和中断处理子程序流程图分别如图4( b) 和图4 ( c)所示。 [p]
程序流程图
图4 程序流程图。
4 实验结果
对电机的转速、定子电流、磁通等变量进行采样、保存, 并通过USB 接口电路转移到上位机; 在上位机上得到的实验波形如图5 所示, 波形的数据采样点为2 048。
从图5( a) 上可以看出, 电机在很短的时间内达到设定的转速值1 000 r/ min。在启动过程中, 定子电流由于PWM 控制, 产生一定的波动, 当转速达到设定值后, 定子电流也很快趋于稳定, 动态响应很快; 从图5( b) 上可以看出, 当转速发生变化时, 定子电流的q 轴分量( 转矩分量) 基本没有变化, 电机的电磁转矩也不会发生变化; 从图5( c) 和( d) 可以看出, 当电机转速发生变化时, 电机的磁场变化幅度可以忽略, 从而电机的转速也不会发生变化, 即设计的控制系统对转速的控制精度很高, 完全达到了设计要求。
实验波形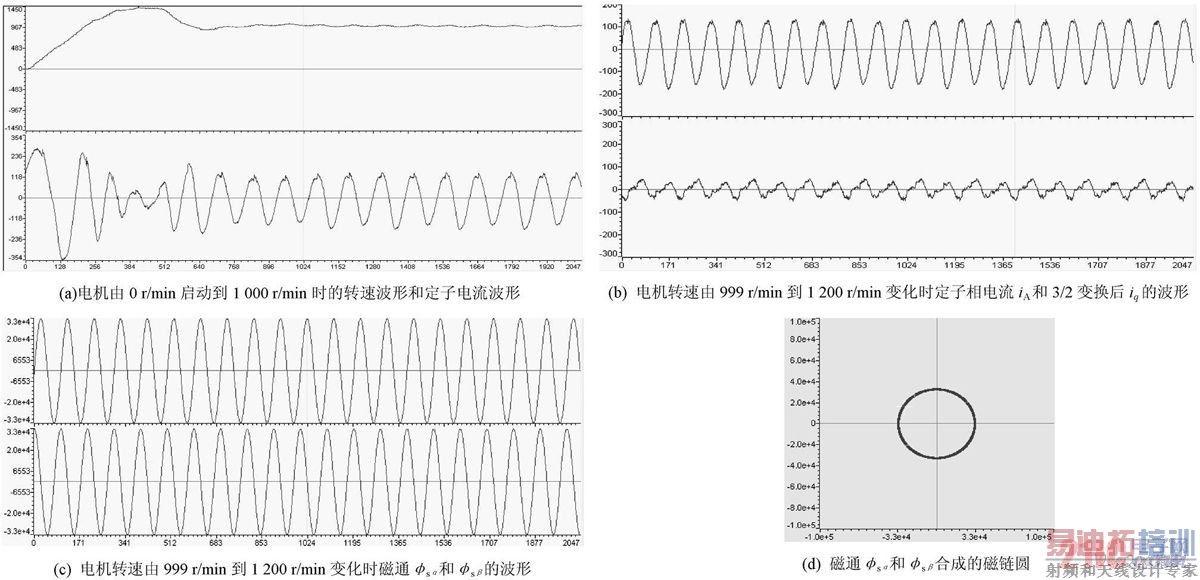
图5 实验波形。
5 结 语
本文采用以T MS320LF2407A 为PWM 控制核心, 以A T89S21 控制单元为电机转速控制管理核心的三相交流异步电机双闭环调速控制系统具有数据存储、实时显示等功能。实验结果表明, 该控制系统具有动态响应快, 控制精度高等优点。实践证明, 该系统还具有较好的抗干扰性。该系统对电机调速系统的设计和实现也具有较高的指导意义。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
