- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于CAN总线技术实现的船舶电站自动控制系统
录入:edatop.com 点击:
0. 引言
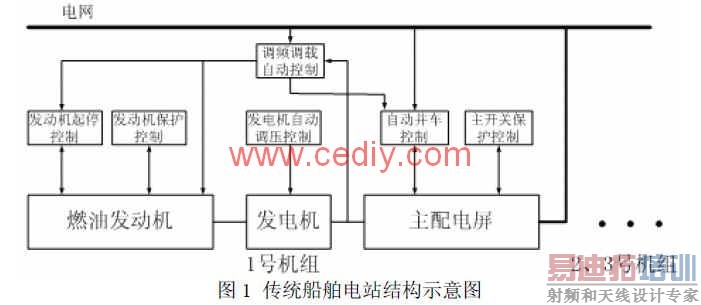
船舶电站一般由燃油发动机、发电机、主配电屏组成,如图 1所示,每个组成部分有各自的输入输出信号,传统的控制方式是将各自的输入或输出连接到对应的控制器,由对应的控制器实现单台设备的控制,如电网检测到负载较大时,自动产生一个备用发电机起动信号,备用的发动机控制器接受到该信号后自动起动,延时并建立电压后,由自动并车装置控制将该台发电机并入电网运行,运行过程中由负载分配装置进行负载的自动调节,如果电网负载较小时,经过负载平衡分配后,每台发电机的负载过小,系统将会自动卸载一台原来备用的发电机,待脱离电网运行延时后自动熄火并回到备用状态,实现电站的自动解列。
船舶电站一般由燃油发动机、发电机、主配电屏组成,如图 1所示,每个组成部分有各自的输入输出信号,传统的控制方式是将各自的输入或输出连接到对应的控制器,由对应的控制器实现单台设备的控制,如电网检测到负载较大时,自动产生一个备用发电机起动信号,备用的发动机控制器接受到该信号后自动起动,延时并建立电压后,由自动并车装置控制将该台发电机并入电网运行,运行过程中由负载分配装置进行负载的自动调节,如果电网负载较小时,经过负载平衡分配后,每台发电机的负载过小,系统将会自动卸载一台原来备用的发电机,待脱离电网运行延时后自动熄火并回到备用状态,实现电站的自动解列。
1. CAN总线与船舶电站
随着航运事业的发展和船舶电站的要求提高,总线技术逐渐在船舶控制技术中使用,分布式系统在新设计系统中渐渐成为主角。其中控制器局域网(Controller Area Network,CAN)模块是一个串行接口,可用于与其他外设或者单片机之间进行通信,此接口/协议是针对允许在噪声环境下通信而设计的。本文以CAN总线为基础,结合单片微机(MCU)技术,
将船舶电站中的三台发动机、三台发电机、三个主配电屏构成的供电电站系统实现无人自动控制并可实现远程监控。
CAN具有几个重要的特点:一是总线协议完全开放,从相关 CAN芯片或 MCU中可以直接得到相关的控制字及寄存器,只要对相关的寄存器进行有效的设置,CAN总线模块能自动地进行通讯,MCU可以直接通过读或写处理 CAN通讯的信息;二是 CAN为底层协议,用户完全可以在此基础上进行用户自定制的高层协议;三是该总线有成熟的市场使用,有可靠的抗干扰特性。所以在船舶控制系统中也越来越多地使用CAN 总线。
船舶电站按控制功能可以分成如下几个部分:
1) 发动机的起动、停止控制
2) 发电机的电压控制和无功分配控制
3) 发电机的信号检测及保护控制
4) 发电机自动并车控制
5) 发电机的电能管理控制
上述控制各有对应的传感器,信号变送器和执行控制器与之相配,本系统将各环节或组成部分用带 CAN总线的单片微机来实现,系统结构具体如图 2所示,系统分为三层,昀高一层是一个电网的电能管理控制器( PMU), 检测电网的用电情况,并根据情况向中间一层对应的控制器发送起动或停止信号,或发出负荷增减信号,中间一层是每台发电机所需要的控制器,根据需要调节控制各自的电量信号,如电压或电流等,昀低一层是传感器和执行器层,由一个或几个传感器或执行器构成一个 CAN总线的单元,所有的组成均挂在一个 CAN总线网上,为保证系统可靠,物理上每个单元带双 CAN接口,整个网络构成两个 CAN网络,即 CAN 总线实现冗余控制,理论上,任意一个控制器均可控制任意一个传感器或执行器,即可实现控制器的冗余控制,实际上是将三台发电机对应功能的控制器做成相互冗余,不同性质的控制器不做冗余,但是昀高一级的控制器( PMU)内带中间以及所有控制器的功能,可以实现向下冗余控制。
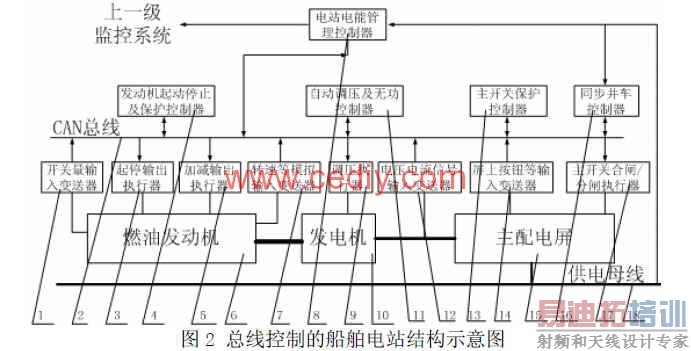
开关量输入变送器 1是检测燃油发动机的一些基本信号并将其转换成CAN 总线接口信号,这些基本信号包括:冷却水压力,滑油温度,油底壳油位,发动机备用状态,发动机自动控制位置,燃油压力,起动空气压力等;CAN总线 2是整个系统通讯的网络总线,图示为一条总线,实际为保证系统可靠,使用两条总线方式,每个单元均带 2个总线接口,实现双总线冗余;起停输出执行器 3是带 CAN接口的继电器输出,去控制发动机的起动、停止和紧急停止电磁阀;发动机起动停止及保护控制器 4是控制发动机运行或停止的控制核心,一方面接受控制按钮等信号,一方面接受 CAN总线的信号,并根据这些命令信号去控制发动机;加减输出执行器 5是带CAN总线的继电器输出控制器,并带本地手动输出,其作用是控制发动机内调速器的输入,起到调节速度或负载的目的;燃油发动机 6根据起动或停止电磁阀控制运行,根据调速器来调节运行速度或输出功率;转速等模拟输入变送器 7是检测发动机的速度,冷却水温度,滑油压力,排气温度等一些重要参数的传感器并将信号转换为 CAN总线接口的信号;电站电能管理控制器 8是整个控制系统的调度控制单元,检测电网和每台发动机的状态,实现调频调载的自动控制,或实现自动起动,或控制自动卸载解列;调压执行器9是带CAN总线控制的相复励自动调压控制器,根据 CAN总线来的命令或自带的调节旋钮信号调节其旁路可控硅的触发角,从而实现发动机的调压控制;发电机 10接受 9的励磁调节,由原动机 6带动输出电能给配电装置;自动调压及无功控制器 11根据发电机的电压,电流信号,同时需要判断其无功功率和功率因素值,来调节其输出给单元9,实现电压恒定及无功分配均衡;电压电流信号输入变送器 12是检测本发电机输出的电压和电流信号以及两者之间的相位差,计算出需要使用的功率值,无功功率值,功率因素值等电量,并转换为数字信号通过 CAN接口提供给需要的其他环节;主开关保护控制器 13主要实现发电机的过电流、欠电压、逆功率的保护,其输入信号由环节 12提供,主开关及配电屏状态信号作为辅助信号输入,其控制的是主开关的分断控制;屏上按钮等输入变送器 14是将配电屏上的按钮等所有操作信号转换为标准的CAN 接口信号并提供给 CAN网络上的有关环节使用;主配电屏15是含主开关,有关继电回路,有关设备安装其内部的配电装置;主开关并车控制器 16将检测本发电机和电网之间的电量差别,通过调节本发电机实现两者的同步并自动并车;主开关合闸/分闸执行器 17是带 CAN接口的继电器输出环节,其与主开关配套,实现主开关的储能,合闸或分闸的控制;供电母线 18是船舶电站三台发电机供电的电网,所有外部用电设备均经过本电网供电。 [p]
2. 带 CAN总线接口的 MCU单元
从图2可以看出,控制系统相关环节均需要配有CAN总线接口,包括传感器信号输入和控制输出,其中有些信号变送环节还需要经过计算和分析,基本上带CAN总线的单元均需要配单片微型计算机MCU,通过MCU采集需要的信号或输出控制信号,由MCU和CAN实现总线接口,为方便该功能的实现,选择带CAN总线接口的MCU,本系统使用MICROCHIP公司的PIC30系列的控制芯片来实现,其内置CAN模块主要特性如下:
• 实现CAN协议:CAN 1.2、CAN 2.0A和CAN 2.0B
• 标准和扩展的数据帧
• 数据长度为0 到8 字节
• 可编程比特率达到1 Mb/s
• 支持远程数据帧
• 双缓冲的接收器,带两个区分优先级的接收报文存储缓冲器
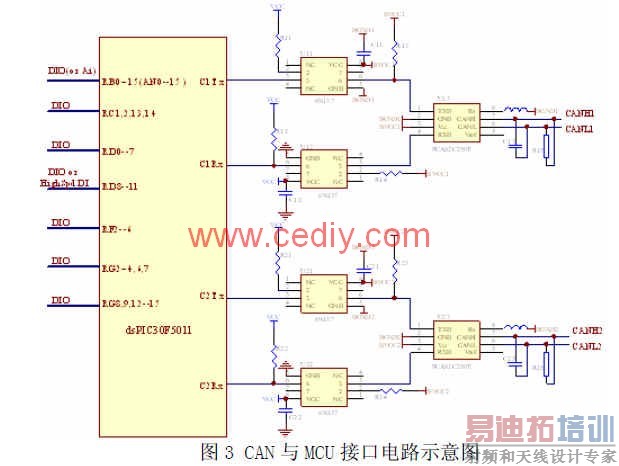
根据上述具备 CAN通讯接口的 MCU特性描述,结合使用场合,配以相关的电路可以实现带双 CAN接口的多种多样的变送器和执行器,MCU采用 dsPIC30f5011,内置两路 CAN接口。MCU与 CAN接口电路如图 3所示,C1Tx是 1号 CAN总线的发送信号,C1Rx是 1号 CAN总线的接受信号,C2Tx是 2号 CAN总线的发送信号,C2Tx是 2号 CAN总线的接受信号,外围开关量可以实现昀大 48路输入或输出,模拟量昀大可以实现 16路输入。MCU与外围采用高速芯片 6N137进行光电隔离 , CAN总线收发器采用标准的 PCA82C250,其输出为差分信号,定义为 CANH和 CANL一对,采用双绞线方式挂在整个系统 CAN总线网络上。CANH 和 CANL之间并联小电容可以起到滤除总线上的高频干扰和一定的防电磁辐射的能力,另外,在 CAN 总线的终端处的两根线 CANH 和 CANL间还并联一个 120欧姆的电阻,以消除信号的反射。
MCU内具备强大功能, 16位 CPU,程序存储器达 66K,4K RAM,1K EEPROM,16 ×16bit工作寄存器,昀高时钟可以使用 10M晶振倍频 16倍,所以一般应用场合均能适应,由于自带 DSP核心,对要求快速响应的数据处理也能胜任,一般不需要扩展即可满足需要,具体需要实现的信号输入输出,只要配以合适的外围接口电路即可实现;需要实现的控制功能也可编程实现。在本系统中除电站电能管理控制器要求比较复杂,需要进一步增强系统配置外,其它控制器和信号接口或变送器等均使用上述电路实现,带 CAN接口的变送器或执行器一端如图 3所示实现 CAN总线接口,另一端配以 MCU对应的外围电路,可实现带CAN总线的不同功能的输入输出。具体如下:
2.1 带 CAN总线的常用信号变送器
常用的信号分为开关量输入, 0-5V,4-20mA,热电阻,热电偶等,其中开关量信号输入采用光耦隔离输入,模拟量输入采用高性能的仪表运算放大器构成,热电阻,热电偶等均采用标准的信号调理电路,所以对 MCU而言,输入的均为标准的0-5V信号,对应传感器的昀大量程。经信号调理后的 16路模拟量输入接到 MCU的RB0-15,即可实现 MCU对该 16路模拟量输入的采样。开关量输入信号变送器将输入信号隔离后送到 MCU的PORTB-G口,昀大可以实现 48个输入,除使用光耦隔离电路外中间不需要其它电路。
2.2 带 CAN总线的编码信号变送器 正交脉冲编码输入,有A,B正交的2相输入,即相位上相差90度,其昀到频率可达20KHz。由于频率较高,光电隔离应采用高速光耦来采样,可以使用 MCU的信号捕捉接口 RD8—11来实现 2组 4个正交脉冲编码输入,配置 MCU相应的寄存器可实现正交脉冲编码的计数和正负判断。
2.3 带 CAN总线的电量信号变送器
电量信号的采样需要采集电压和电流信号并转换成有效值,调理成 MCU需要的0-5V信号,同时需要正弦-方波的转换,送到 MCU的中断接口处,便于相位计算。电压信号的调理电路如图 4所示,电流型电压互感器将取样电压信号转换成 mA电流信号经运放 U2放大成电压信号,经 U1A比较电路取得交流电压过零方波的检测信号,供频率转换和相位计算用,运放 U1B,U1C电路构成整流电路,U1D电路为滤波电路,其输出为 MCU需要的0-5V电压信号。电压信号采样考虑到变化幅度有限,选择 1.5倍额定电压对应 MCU昀大输入5V,而电流信号变化比较大,特别是大电机起动时,电流可以达到其额定电流6-8倍,电流的保护控制也需要能有效地实现8-10倍的保护控制,所以同一个电流的采样分成三个等级来实现,一是 2倍额定电流对应 MCU对答输入5V,一是 4倍额定电流对应 MCU的 5V输入,另一是 10倍额定电流对应 5V输入。电路原理与图 4所示类似,这样,一台发电机输出的三相电压和电流的采样要用到 12个模拟量输入,3个电压过零中断输入,3个电流过零中断输入。根据上述信号 MCU将不仅得到相应的电压值、电流值,还要计算出相位差,功率因素,有功功率,无功功率,视在功率,有功电能统计等,同时需要根据额定值确定是否有过电压、欠电压、长延时过电流、短延时过电流、瞬时过电流,逆功率等故障信号,所以本电量变送器含多重功能。 [p]

2.4带 CAN总线的执行器
MCU的 I/O口可以配置为输出,根据需要将相应的 I/O配置成输出后,接到光电耦合单元,其输出再经过三极管驱动继电器实现继电器的输出。执行器的控制为其控制电源经过继电器的触点后送到执行器上,控制其正反运转实现相应的调节,或控制电磁阀回路的通断等。在一些特殊场合,MCU的输出可经过光电耦合后再经三极管驱动MOSFET,实现 PWM的调节控制,或有关的执行器件的动作调节。 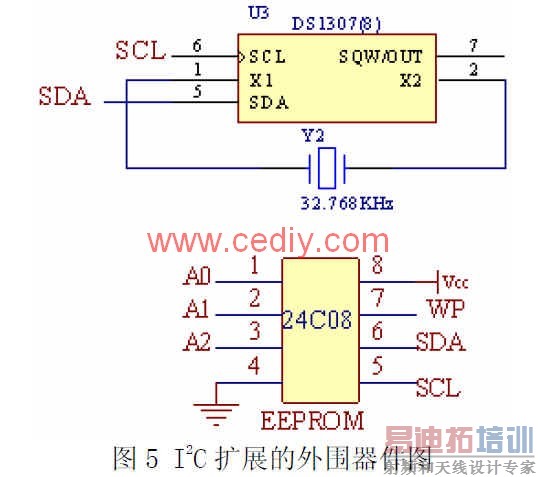
3. 带CAN总线接口的各种控制器
带 CAN总线的控制器 CAN接口与上述 MCU的相同,在控制器中,输入输出不是主要的,主要的是 MCU的运算能力,存储能力,控制能力,显示驱动等,所以考虑使用的 MCU为 PIC系列中较为高端的MCU,其硬件电路也大同小异,除与图 3使用 CAN接口电路相同外,另外为配合需要使用了一些带I 2C的扩展电路,如EEPROM,时钟电路等,如图5所示,其中SCL,SDA为 MCU中自带的 I 2C的接口,定义为时钟线和数据线,A0,A1,A2为相同器件同时使用时的选择信号,由 MCU控制,U3为时钟芯片DS1307,与为时钟源晶振,24C08为I 2C接口的EEPROM。如需要其他功能,可以在原来I 2C总线接口电路上再扩展。在此硬件基础上,通过 CAN接受总线上的信息,各控制器按其需要的功能编制相应的软件,并将相应的输出信号通过 CAN发送到对应的输出 CAN接口模块去。控制器按具体位置和功能分成发动机控制器、自动调压及无功调节控制器、配电保护控制器、同步并车控制器、电能管理控制器等。
4.冗余控制技术
除主要的电能管理控制器 PMU外,设计的其他几个控制器的硬件电路接近,实现的功能不同,但是可以通过软件实现相互间的控制冗余,所以在实际设计中,每个控制器内设计
成两套控制程序,正常情况下,一套本身主要的程序在工作,另一套作为其它控制器的备用在读取 CAN总线上的数据,但是备用的程序不作输出动作。当系统中某控制器故障出现时,CAN总线网络上无该控制器正常工作的心跳信号后,作为它备用的控制器将其备用的程序唤醒工作并输出,以替代故障的控制器,同时在工作的控制器上出现相应的显示。系统设计中各控制相互冗余备用的关系如表 1所示,其中电能管理控制器可以作为其他控制器的备用。
除控制器具备的冗余外,前述 CAN总线均采用双 CAN接口,实际线路也是对应的双 CAN网络,其中一个 CAN总线出现故障后,系统可以自动启用备用 CAN网络,从而实现 CAN总线的冗余控制。
5. 结论
船舶电站控制系统采用分布式结构 , 硬件设计标准化,软件设计模块化,使整个系统设计组合较为灵活,这种设计方法对于其他项目的研制也具有一定参考价值。系统实际运行效果良好,工作可靠,说明 CAN总线技术在船舶电站中的使用是成功的,并可推广使用。
本文创新点:昀初开发的 CAN协议被运用于汽车制造领域,现把 CAN技术移植到船舶电站的控制方面,实现了船舶电站的无人操纵、过程自动控制及远程监控,提高了船舶自动化程度,改善了系统性能。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
