0 引言
随着多媒体技术、网络技术的迅猛发展和后PC机时代的到来,利用嵌人式系统实现远程视频监控、可视电话和视频会议等应用已成为可能。为了实现这些应用,实时获得视频数据是一个重要环节。针对这一点本文在嵌入式系统平台上,基于Video4Linux(简称V4L)技术,实现了摄像头驱动开发,详细叙述了V4L技术和摄像头在Blackfin536 DSP平台上的Linux驱动程序设计。
1 Video4Linux
V4L是Linux的影像串流系统与嵌入式影像系统的基础。Linux在TV、多媒体上的应用是目前相当热门的研究领域,而其中最关键的技术则是Linux的V4L。V4L是Linux kernel里支持影像设备的一组APIs,配合适当的摄像头与摄像头驱动程序,可以让我们实现影像采集、AM/FM无线广播、影像CODEC、频道切换等功能;而目前最主要的则是应用在影像串流系统与嵌入式影像系统里,其应用范围相当广泛,例如:远距离教学系统、远距离诊断系统、视频会议等。
目前,V4L这套接口已发展为V4L 2,前者比后者简单,但存在两个不足之处:驱动程序设计时不能同时打开多个设备;现存的V4L API不能很好地支持带编码能力的设备。本文为便于研究摄像头驱动开发,还是使用V4L。
V4L主要结构体如下:
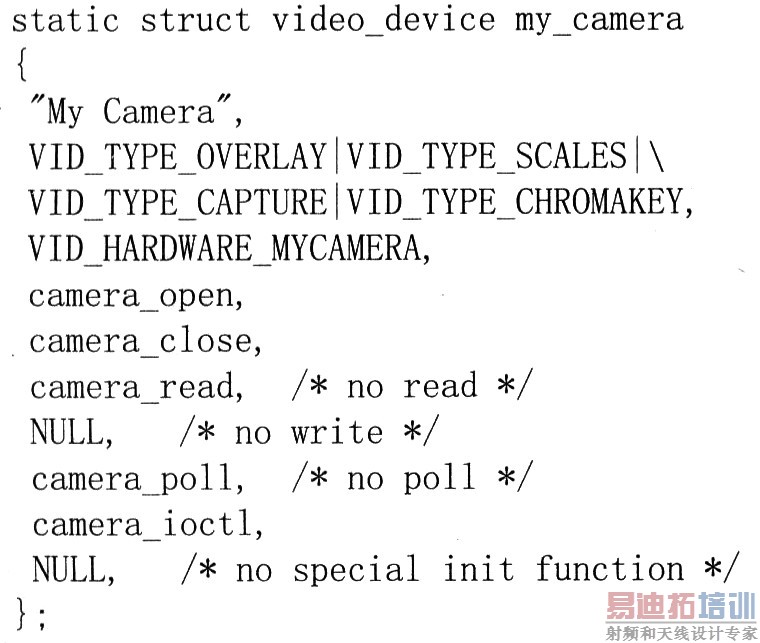
camera_open,camera_close是打开和关闭视频采集设备;camera_read,是读取视频图像;视频驱动主要的控制接口都是通过 ioctl来实现的,如图像的格式、亮度、色度等信息都是通过ioctl函数获取和设置的。ioctl命令部分如下:
|

[p]
V4L支持两种方式捕获图像:mmap(却嬗成浞绞
和read(直接读取方式),本系统采用mmap。需预先设置好图像的大小和深度,接着使用 VIDIOCGMBUF命令,它会返回用于mmap的缓存(buffer)的大小以及每帧缓存的偏移地址(offset)。驱动程序里的映射函数为 static intbf536_v411_mmap(Struct file*filp,structvm_area_struct*vma);抓帧完成后,在应用程序里通过内存映射,读取图像数据。 2 硬件平台
本系统采用CMOS模拟传感器,经TI公司的TVP5150A视频解码芯片把模拟信号转成 ITU-R BT.656视频信号,再送给ADI公司的Blackfin536 DSP处理器进行图像处理,如图1所示。TVP5150向DSP提供采样时钟信号CLK(27MHz),8根数据线传输内嵌同步控制码流的ITU-R BT.656格式的数据,DSP通过I2C接口对视频解码器进行配置。视频数据由DMA搬运到SDRAM。 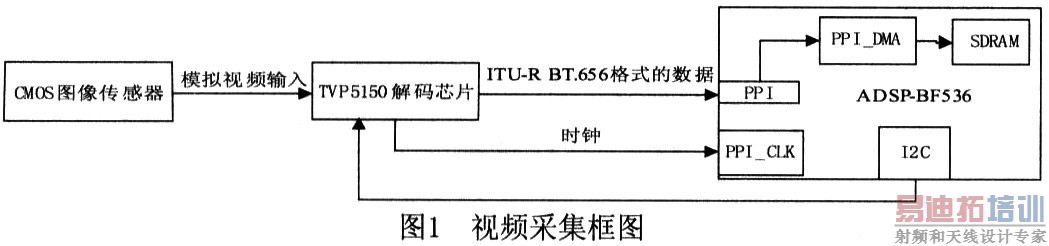
3 驱动程序设计
3.1 驱动程序核心结构体的介绍
本系统的软件平台是嵌入式uclinux,因此,摄像头作为一个设备驱动加载到uclinux内核中。一般而言,每个设备驱动都会有它的核心结构体,摄像头驱动的核心结构体设计如下:struct camera device 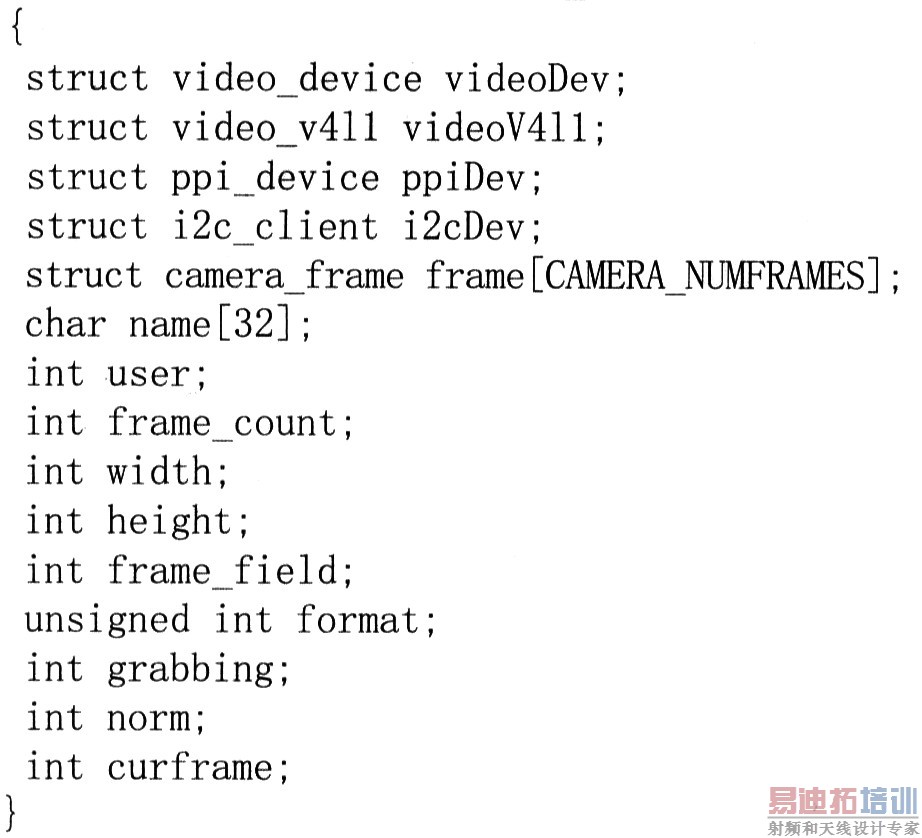
该结构体储存了几乎全部与摄像头视频图像相关的信息。其中的结构体videoDev和videoV4l1是与V4L相关联的,ppiDev是与ADSP- BF537处理器硬件配置相关的,而frame[CAMERA_NUMFRAMES]则与采集时当前视频帧数据相关联。此外,camera_device 该核心结构体还定义了表示奇偶场的成员变量frame_field,表示当前帧的抓取状态的成员变量grabbing等。
3.2 硬件配置
本系统在开发过程中,最主要的难点在于硬件的配置,正确配置TVP5150、PPI、DMA需要搞清楚整个摄像头的工作原理,以及各种图像格式的基本知识。本文主要给出PPI和DMA的几个关键配置选项。
3.2.1 PPI配置
TVP5150A视频解码芯片把模拟信号转换成ITu-RBT.656视频信号,ITU-R BT.656是4:2:2并行接口的数字演播室标准。对于PAL制系统(NTSC系统类似),一帧图像包括两场视频数据(奇偶场),每一场图像由四部分构成:有效视频数据,水平消隐,垂直消隐以及控制字。而PPI接口在ITU-656输入模式下可以支持3种数据传输,若选择有效视频数据,则可以实现PPI 与TVP5150A解码器的无缝连接。且传输的有效视频数据就是UYVY422格式,所以配置PPI控制寄存器为ITu-656输入、传输有效视频数据。 PPI传输的有效视频数据每场都由288行组成,每行有1440个取样字,其中720个亮度Y取样字,360个蓝色色差Cb,360个红色色差Cr,按 Cb、Y、Cr、Y的次序排列。而UYVY422格式数据是:每个像素点都取亮度值,而蓝色色差和红色色差是每两个像素点才各取一个,两者交替取,所以图像像素是720×576。这样可以确定ppi frame=576(整幅图像的行数)。而ppi count不用配置,因为在ITU-R BT.656视频信号中有H和V信号。 [p]
3.2.2 DMA配置
本系统采用二维DMA来提高数据的传输速度,采用16位传输,且传输完一场视频数据后产生中断。dma_x_count=720(相当于每行数据需传输的次数,每行720个像素点,每个像素点2个字节。每行要传720×2个字节,而dma是16位传输,所以x_count=720)。 dma_x_modify=2(相邻两次传输数据的偏移地址,以字节为单位,因为是16位传输,所以为2)。
由于PAL制视频数据是隔行扫描,每帧分为奇偶两场,两场在时域上是分开的,但是在数据处理时需要将两场合成一帧进行处理,因此为了减少CPU的处理时间,可以利用DMA直接进行场合成。在一场的传输中,DMA在传输完一行数据后,预留下一行的存储空间,将数据存放到第三行的地址。在一场数据传输完后,下一场的数据就填充上一场预留的存储空间,也是隔行存储,这样两场数据就合成一帧数据了。所以,dma_y_modify=1442(一行720像素点,占720×2字节。而一行末地址到下一行首地址还需2字节。所以720×2+2=1442)。同时,两场数据存放的起始地址的设置间隔也是1442字节。
3.3 中断服务子程序
本系统的中断服务子程序主要是一场数据采集完后,产生中断,并根据数据的奇偶场做出相应的处理。其流程如图2所示。 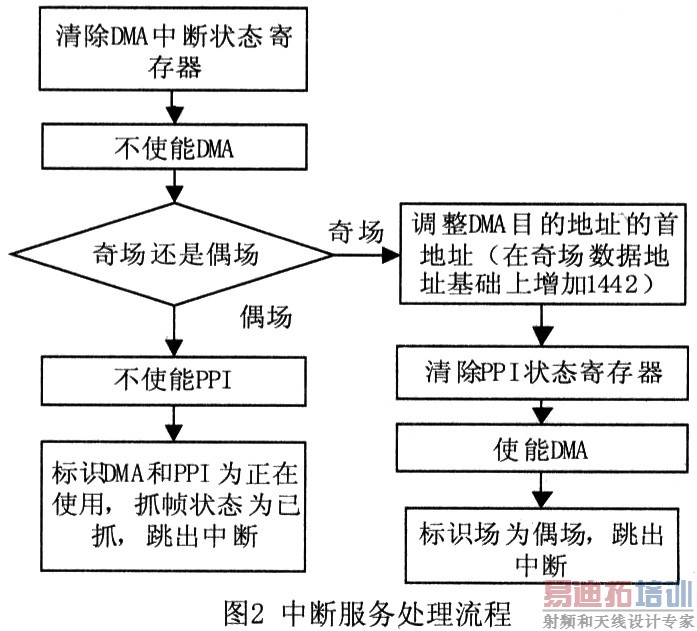

4 结束语
本文介绍了在Blackfin DSP和Linux的平台下,摄像头驱动的体系结构和具体实现。此驱动由测试程序测试,可以正常工作。此驱动尚存在不足之处,那就是在驱动的抓帧过程中没有采用乒乓操作,但是采用了两个帧缓存来存取数据,因此乒乓操作可以在上层应用中完成。
|
