- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
Small RTOS51 下CAN总线数据收发实现
录入:edatop.com 点击:
1 CAN总线简介
现场总线技术FCS(Fieldbus Control System)成为当今工业自动化技术发展的热点,德国Bosch公司的CAN(1Mbit/s)是国际标准之一,也是Controller Area Network 的应用标准。它属于现场总线范畴,是一种有效支持分布式控制或实时控制的串行通信网络。由于其高性能、高可靠性、及独特设计,CAN总线已成为目前国外最普及和实时性最高的现场总线。CAN总线在可靠性和实时性方面远远优于RS-485等工业现线CAN总线主要有下列特征:
1. 数据信号采用差分电压传输,两条信号线”CAN_H”和” CAN_L”。
2. 传输介质可用双绞线、同轴电缆或光纤,具有较强的抗干扰能力。直接通信距离最大可达10km(速率小于5kbit/s),最高通信速率可达1Mbit/s(此时距离最长为40m)。
3. 节点不分主从,节点任意时刻可向其他节点发送信息,依据优先权进行总线访问,满足不同的实时要求。
4. 采用非破坏性基于优先权总线仲裁技术。
5. 采用短帧结构,每帧为8bit,保证了数据出错率低。
6. 可以点对点、点对多点及全局广播方式传送接收数据。
7. 发送期间若丢失仲裁或由于出错而遭破坏的帧可自动重发送。
2 Small RTOS51简介
Small RTOS51 是一个用于8051系列单片机的多任务实时操作系统。8051系列单片机一般只有很少的ROM和RAM资源,如P89C51只有4KB Flash和128字节RAM。一般的实时操作系统如RTX Tiny 虽然小,但是任务没有优先级和中断管理,也无源代码,而uc/os-II规模太大,需要大量外部RAM。基于此,Small RTOS51是专为51 单片机编写嵌入式操作系统,它使用了RTX51 Tiny 的堆栈管理机制,并像uc/os-II一样是抢占式的。
3 一个典型的CAN节点
3.1.CAN总线接口的结构
一个CAN总线接口有3 部分组成,如图(a)所示,它们分别对应于CAN总线的物理层、数据链路层和应用层。
最上层为微控制器,主要负责上层应用以及系统控制,包括CAN协议的应用层协议的实现,协调各系统设备的工作。(本设计采用的MCU是8051)
中间层为CAN控制器,CAN控制器负责处理数据帧,完成数据的打包、解包,错误界定,并提供报文缓冲和传输滤波。(本设计采用的CAN总线控制器是Philips公司生产SJA1000)
最底层为CAN收发器,主要是接口电平的转换,接口电器特性的处理。(本设计采用82C250)
(a)CAN接口结构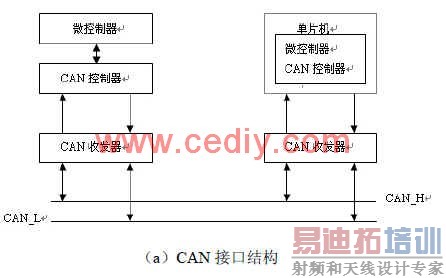
3.2.节点电路设计
(1)SJA1000与单片机接口电路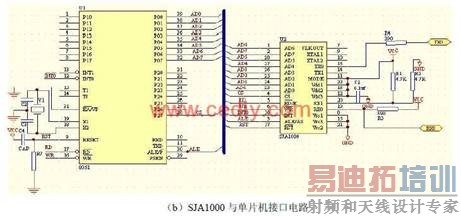
(b)SJA1000与单片机接口电路
SJA1000 的AD0-AD7与单片机的数据总线相连,地址A17作为SJA1000的片选使能端,由ALE、WR、RD控制SJA1000 数据的发送和接收。注意SJA1000复位端的连接,单片机是高电平复位,而SJA1000是低电平复位,因此复位信号要通过一个反相器与SJA1000复位端相连。另外SJA1000的11脚MODE接高电平,选择Intel二分频模式 。SJA1000的16脚时中断信号输出,在中断允许情况下,有中断发生时,16脚出现有高电平到低电平的跳变。因此16脚可以直接与单片机的外部中断输入脚相连接。
SJA1000的ODE引脚可选择接口模式:
◆Intel模式 MODE高
◆M0torola模式 MODE低
[p]
(2)节点前端物理接口电路的设计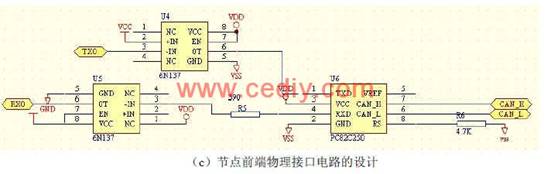
(c)节点前端物理接口电路的设计
使用SJA1000 CAN总线控制器可完成CAN总线通信任务,但它的驱动能力不够,因此外接82C250总线驱动芯片。82C250是CAN控制器和物理总线间的接口。之所以选择82C250芯片是因为其具有高速性(最高可达1Mbit/s),具有抗瞬间干扰保护总线的能力。具有降低射频干扰的斜率控制。此外,它可以与110 个节点相连,防止电池与地之间发生短路,当某一个节点掉电时,不会影响总线。
(3)设计电路注意的问题
◆SJA1000通过光耦与82C250的连接是光电隔离的接法。这样可以防止线路间的串扰。在总线两端要接2 个120欧姆的总线阻抗匹配电阻。忽略掉它们会降低总线的抗干扰能力,甚至导致无法通信。
◆SJA1000的TX1脚悬空,RX1引脚的电位必须维持在0.5vcc以上,否则将不能行成CAN协议所要求的电平逻辑。
◆光耦6N137的输入端2,3脚的信号输入极性要与光耦的输出极性相同,如果电路设计时极性相反,也可以通过软件编程改变SJA1000的数据输出极性,从而使单片机的输出数据与82C250中数据的极性一致。
4 在Small RTOS 下CAN节点的数据接收与发送实例
下面将通过一个简单的实例(需要配置Small RTOS51操作系统)来介绍在Small RTOS 下CAN节点的数据接收与发送过程。实例使用两个CAN节点组成CAN网络,实现的功能是,每隔一定的定时周期发送一帧数据,同时接收CAN数据,并将接收的CAN数据发送到CAN总线上。LED将显示收到的数据帧的头两个字节。
(1)实例部分代码实现
void main(void)
{
CpuInit(); //微控制器初始化
UserTickTimer(void);//系统时钟节拍的初始化
OSStart();//启动small rtos操作系统
SendData();//发送数据任务
{ unsigned char data status;
unsigned char i;
unsigned char xdata *p =&CAN1_SJA_BaseAdr+REG_CAN_SR ;
unsigned char xdata *p1;
status=SJAInit();//初始化can控制器
if(status!=0){
OSSendSignal(2); //唤醒错误处理任务
}
P_SJAFrameStructApp =(P_SJAFrameStruct )&BufCan2[0];
IT0 =0;//电平触发模式
EX0=1;//使能CAN中断
BufCan2[0]=0x88;
P_SJAFrameStructApp->FrameID=0x11111111;
while(1)
{
OSWait(K_TMO,2);//系统等待函数,每两个时钟周期发送一次数据
P_SJAFrameStructApp->FrameID++;
p1=(unsigned char xdata *)&P_SJAFrameStructApp->FrameID;
for(i=0;i<4;i++) //发送测试数据
BufCan2[1+i] =*(p1+i);// 0x55;
for(i=0;i<4;i++)
BufCan2[5+i] =*(p1+i);// 0x55;
for(i=0;i<4;i++)
BufCan2[9+i] =*(p1+i);// 0x55;
status=SJASendData(BufCan2,0x10);//向CAN总线发送数据,所发送数据的首地址是BufCan2
if(status!=0) //表示发送数据错误
OSSendSignal(2);唤醒错误处理任务
}
}
void DisPlay(void)
{
while(1){
OSWait(K_TMO,1);
ShowLED(); // led显示处理
}
}
Error();// 错误信息处理任务
}
(2) 测试结果:
如果运行正确:数码管会显示依次加1的数值,否则:数码管会显示E-xx的错误代码
5 结束语
CAN自其诞生以来,以其独特的设计思想、优良的性能和极高的可靠性越来越受到工业界的青睐,CAN已经广泛用于汽车、火车、轮船、机器人、智能楼宇、机械制造、数控机床、纺织机械、医疗器械、农用机械、液压传动、消防管理、传感器、自动化仪表等领域。目前支持CAN协议的有Intel,Motorola,Philips,Siemens,NEC,Silioni,Honeywell等百余家国际著名大公司。因此CAN成为许多人学习的热点,本文对读者了解CAN总线节点的设计以及CAN总线对数据的接收和发送原理有很大的帮助。
本文作者创新点是实现了在实时操作系统Small RTOS51下CAN总线上数据的接收与发送,用一个简单的实例来说明了CAN总线的接收、发送原理。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
