- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于CAN总线的电车漏电检测装置的研制
录入:edatop.com 点击:
0 引 言
由于石油资源的日益紧缺和人们环保意识的提高,新型动力交通工具不断涌现,如:氢燃料汽车、乙醇燃料汽车等,其中以电能作动力的环保型交通工具发展更为迅速。载有蓄电池的无轨电车是最具发展潜力的公共交通工具,它除了具有电车的优点以外,还省去了架设部分供电线路的优点,对美化城市起到极其重要的作用。据资料显示,北京在2008年就有近800辆的这种“准”无轨电车投入运营。然而,由于这样大型的电车内部蓄电池数量非常多,供电电压达到500 V之高,所以绝缘和漏电的处理技术一直是困扰电车开发人员的一大难题。目前,电车供电系统采用了多重逆变技术,把低压24 V供电与高压电动机驱动部分、大型充电机部分进行严格隔离,并安装了与大地接触的放电铁链,使得漏电问题得到了很好的解决。但是,在偶发情况特别是雨天天气环境下,依然会出现乘客上车过程中被电击的现象。针对此,实时测量放电铁链即大地与车皮之间电压的漏电检测装置的研制就非常必要。
1 工作原理
本装置安装于电车内部,供电电压为电车上的低压24 V电源(实际工作电压在18~36 V),装置本身装有3颗LED指示灯,分别是系统工作电源指示绿灯、低压漏电30 V指示黄灯和高压漏电70 V以上指示红灯,其中1根接线为铁链引线,另外2根接线到前台仪表显示系统。系统框图如图1所示。

电车车皮本身为低压电源的负极,从以往的实测和理论分析得出,被测铁链在漏电情况下达到了电车内部蓄电池的总电压,并且与车皮之间的电压呈现出正负的现象。所以,本系统在设计时充分考虑了上述情况,并在信号调理电路的设计上进行了处理。当被测信号与车皮之间电压在30~70 V之间或在-30~-70 V之间时本装置黄灯亮;当被测信号与车皮之间电压大于等于70 V或小于等于-70 V时本装置红灯亮。
2 系统电路设计及网络协议
本系统的核心控制器采用了ATME公司的高性能8位AVR单片机ATmega 16,其内部具有8路单端的10位ADC采集接口;16 KB的系统片内可编程FLASH,烧写次数达到数万次;1 KB的片内SRAM;具有32个可编程控制的I/O接口;同时还能达到16 MIPS的高运行速度。本装置采用外部扩展CAN控制器的方式,实现了与整车的CAN网络系统进行通信功能。
2.1 信号调理电路
此部分电路主要对被采集电压进行调理,最终转化为MCU能接受的0~5 V的电压范围;由于被采对象是个正负高电压信号,系统对于采集精度要求为±1 V。详细的设计电路如图2所示。

当Vin>0时,二极管D4导通,D2截止;输出到MCU的ADC0上的电压值为:![]()
当Vin<0时,二极管D2导通,D4截止;输出到MCU的ADC1上的电压值为:![]()
为保证调理后的电压值满足MCU的ADC接口电压要求,电路中采用了稳压管进行稳压保护;同时还添加了信号滤波电路进行平滑处理。 [p]
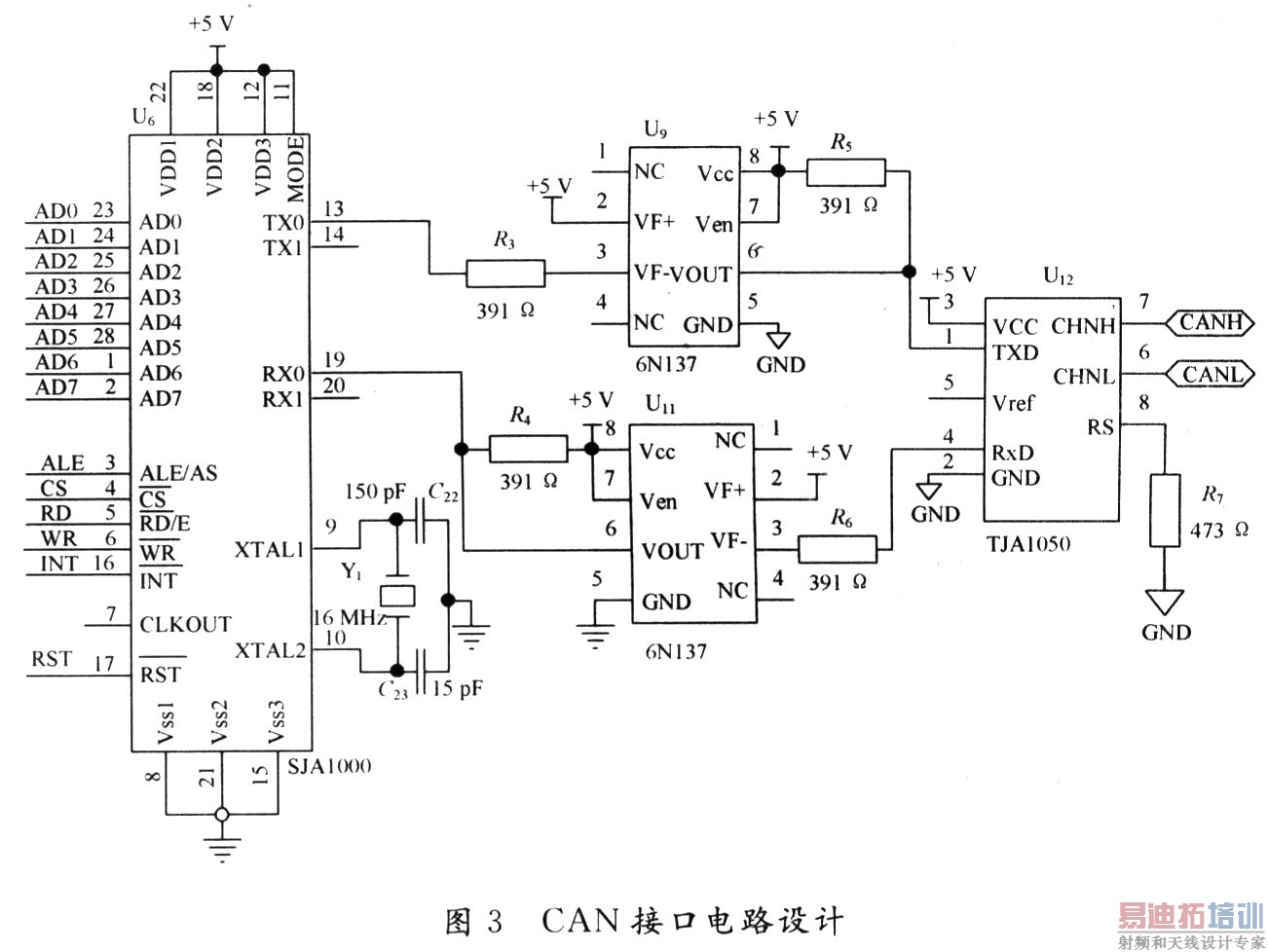
2.2 CAN接口电路与网络编程协议
CAN接口电路采用了PHILIPS公司的SJA1000控制器和TJA1050高性能收发器。为了使本装置与电车上其他各路系统如蓄电池管理系统、发动机系统、仪表显示系统的电气隔离,该CAN接口的设计上采用了高速光耦6N137和单独的隔离5 V电源,隔离电压达到了电车电器部件隔离规范要求的3 000 V。详细设计如图3所示。
CAN 2.0B协议数据单元由标识码和数据域两个,部分组成,标识码包括了优先权(P)、保留位(R)、数据页(DP)、格式域(PF)、特定域(PS)、源地址(SA)和数据域(DF)七部分。
SAE J1939是以CAN 2.0B扩展信息格式为基础,用于大型车辆的协议。该设计参照此协议并兼容了北京公交的无轨电车电器控制CAN编码协议,规定了通讯的波特率为200 kHz。标识码由29位组成,分别为状态ID和指令ID。定义为:PF=0XFF,PS=0X04,优先级=3,地址=0X09。数据域由8个字节,64位组成,各个单元的数据域都有不同定义。
3 软件例程与应用
软件采用模块化、结构化的编程方法,本系统软件部分主要由单片机的数据采集模块和CAN接口的通信模块组成;所有代码在ICC AVR开发环境中进行C语言编写。本系统中,核心处理器器ATmega 16与CAN控制器之间采用中断触发的方式进行命令、数据的接收,并采用轮询方式进行数据的发送。
系统周期性采集到外部信号后,按照规定的格式发送数据到总线上,同时根据需要提前报文和标志并判别是否发送成功;若CAN控制器接收到外部命令数据,利用屏蔽滤波寄存器对接收报文的标识符和预先在接收缓冲器初始化时设定的标识符进行有选择地逐位比较,只有标识符匹配的报文才能进人接收缓冲器并发送信号到MCU的对应引脚,从而触发中断。
3.1 系统初始化
系统初始化主要对系统中ADC与CAN控制器工作时的各参数设置,其主要内容包括:设置对应2个I/O口为ADC口、设定ADC使能和查询读数方式、硬件使能CAN、设置CAN报警界限、设置总线波特率、设置中断工作方式、设置CAN验收滤波器的工作方式、设置CAN控制器的工作模式等。初始化流程如图4所示。

[p]

3.3 接收数据程序
由于接收采用中断的方式进行,MCU获得中断信号后进入命令数据的判别并对CAN控制器进行相关寄存器复位清0操作。若数据与之前规范的一致,则立刻把前次准备好的数据发给CAN控制器。此功能的软件流程如图6所示。
4 结 语
本装置能够实时地检测出漏电电压,通过具有强实时性、高可靠性和更好抗干扰能力的CAN总线技术发送、接收命令和数据。实践证明,该装置能够很好地监测电车漏电状态,从而消除了乘客上车偶尔被电击的现象,提高了整车的安全性能。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:单片机在锅炉水处理控制中的应用
下一篇:一种基于单片机的温度监控系统设计
射频和天线工程师培训课程详情>>
