- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
冰箱的直流无刷电机控制
录入:edatop.com 点击:
无刷直流(Brushless DC,BLDC)电机相对于感应电机具有很多优点。BLDC电机支持无级变速,这可以提高能效并降低噪声。BLDC电机的速度-扭矩特性曲线是平直的,这使电机可以在较低的速度下运行,无需消耗更高电流即可产生相同扭矩。
本文将讨论使用Microchip公司的PIC18FXX31系列单片机,进行冰箱中BLDC电机的有传感器和无传感器控制。
BLDC电机控制
BLDC电机的转子上具有北极(N)和南极(S)交替排列的永磁体。定子由刚片叠制而成,绕组线圈放置在槽里,槽沿轴边切割。要旋转BLDC电机,应按一定顺序对定子绕组进行励磁。为了执行换向序列,清楚转子位置非常重要。转子位置使用嵌入定子中的霍尔效应传感器进行检测。大多数电机会在定子的电机非驱动端嵌入三个霍尔传感器。每当转子磁极接近霍尔传感器时,传感器会产生高电平或低电平信号,指示N或S极接近传感器。根据这三个霍尔传感器的信号组合,可以确定准确的换向序列。表1给出了对应于霍尔传感器输入的典型换向序列。
换向序列
如表1所示,每个序列会将三相中的两相与电源连接,第三相保持开路。图1显示了简化的BLDC电机控制框图。在该示例中,使用Microchip公司的PIC18F2331闪存单片机来控制电源开关。匹配驱动器用于对电源开关进行相应的门控驱动。PIC18Fxx31系列具有6个脉宽调制(Pulse Width Modulation,PWM)通道,PWM频率和占空比可进行编程。Q0至Q5连接构成三相逆变桥。A相、B相和C相分别与每个半H桥的中点连接,PWM0至PWM5分别控制电源开关Q0至Q5。PIC18Fxx31系列具有三个输入捕捉引脚,表示为IC1、IC2和IC3。输入捕捉模块具有一种工作模式,在该模式下,每次任意输入捕捉引脚上发生电平变化时,会捕捉Timer5的值。将霍尔传感器与单片机连接时,适合使用该模式。每次霍尔传感器发生电平变化时,将会产生中断,并捕捉Timer5的值。这个捕捉值对应于电机速度。
表1:对应于霍尔传感器的典型换向序列

当PWM0至PWM5所标记的信号根据序列开启或关闭时,电机将以额定速度运行(见图1)。这种情况假定,直流母线电压等于电机额定电压与开关两端所有电压损失的和。要改变速度,可以对这些信号进行脉宽调制,使信号频率远高于电机频率。通常,PWM频率应至少是电机最大频率的10倍。在序列中改变PWM频率的占空比时,向定子提供的平均电压会下降,从而降低速度。
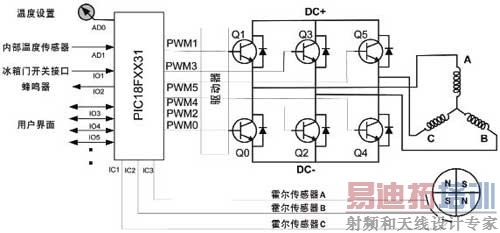
图1 电机控制框图
使用PWM控制电机还有另一个优点。当直流母线电压远高于电机额定电压时,可以通过将PWM占空比限制为与电机额定电压对应的PWM占空比,将为电机提供的电压限制为电机额定电压。这样,冰箱控制电路就可以在具有不同交流输入的多个国家使用。交流电压输入使用二极管桥式整流器转换为直流,控制器的平均电压输出通过控制PWM占空比与电机额定电压匹配。
有几种不同的控制方式。如果在单片机中限制PWM信号,则在相应序列期间,可以一直导通上方的开关,相应的下方开关可以通过所需的PWM占空比进行控制。
在图1中,温度由用户设置。冰箱内部温度使用温度传感器进行测量。根据冰箱的尺寸,可能会有多个传感器位于冰箱内部的不同位置。设置温度和实际温度使用片上模数转换器(Analog-to-Digital Converter,ADC)读取。当温差大于预定义的温度滞后值时(通常小于华氏2度),电机会以低速开始旋转。如果温差较大(例如,冰箱门打开),则电机应以较高速度运行。温差和速度之间的关系可以根据冰箱尺寸确定。当设置温度和实际温度之间的温差改变时,压缩机和风扇速度可以相应地改变。 [p]
PIC18F2331上提供了通用I/O引脚,可用于LED、LCD、开关、继电器和小键盘。图2以流程图形式给出了固件概要。
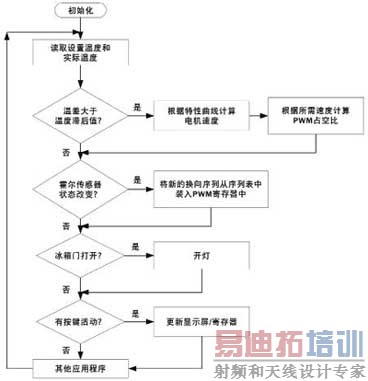
图2 使用霍尔传感器换向进行BLDC电机控制的流程图
BLDC电机的无传感器控制
BLDC电机的无传感器控制根据定子绕组中产生的反电动势(Electro Motive Force,EMF)进行换向。这种方法不需要霍尔传感器。无传感器控制有两个明显优点:可靠性更高、成本更低。
元件较少的系统本身更为可靠。压缩机会产生热量,而温度上升会加速霍尔传感器工作失常或发生故障。在无传感器设计中,不仅不需要霍尔传感器,而且不需要霍尔传感器接线,这些都可以带来成本的节省(至少可以省去5条接线)。
反电动势信号(而不是霍尔传感器)对BLDC电机进行换向,反电动势的大小取决于三个因素:转子的角速度、定子绕组中的线圈圈数以及转子磁场。完成电机设计之后,转子磁场和定子绕组线圈圈数将保持恒定。控制反电动势的因素是角速度或转子速度。反电动势与转子速度成正比。但是,对于给定速度,可以使用电机数据手册中提供的反电动势常量来估计反电动势。
对应于相电压,霍尔传感器和反电动势之间的关系如图3所示。每个换向序列中会有一个绕组正励磁,第二个绕组负励磁,第三个保持开路。如图3,当反电动势的电压极性从正变为负或从负变为正时,霍尔传感器信号会改变状态(存在30°的相差)。在理想情况下,这种状况在反电动势过零时发生。但是,由于绕组特性的原因,会存在一定的延时,应通过单片机对该延时进行补偿。
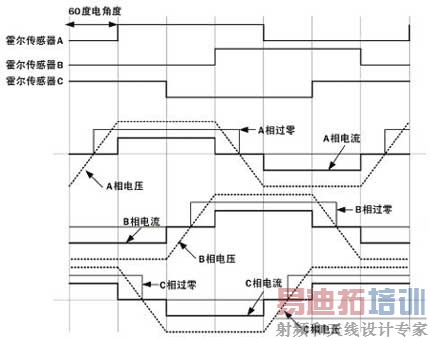
图3 霍尔传感器信号、相电压、电流和反电动势之间的关系 [p]
另一个需要考虑的方面是速度极低时的工作。因为反电动势与旋转速度成正比,所以速度极低时,用于检测过零点的反电动势很小。从停止状态开始工作时,需要以开环方式起动电机。当产生足够的反电动势,足以检测过零点时,应将控制切换为反电动势检测。可以检测反电动势的最小速度根据电机的反电动势常量进行计算。
反电动势过零检测
检测反电动势过零点对于无传感器控制系统非常关键。确定过零点可以使用几种不同的技术。如前面所述,每个换向序列都有一个非励磁绕组,在每个绕组通过非励磁状态时检测反电动势过零点。图4a、4b和4c显示了可以用于检测反电动势过零点的不同方案。在图4a中,A相与电源正极(DC+)连接, C相与电源负极(或回路DC-)连接,B相开路。观察B相上的反电动势,可以看到反电动势朝正电压上升,然后朝负电压下降。将它与直流母线电压的一半进行比较时,可以获得虚拟过零点。通过使用运放比较器,可以确定过零点。
图4b显示了通过产生虚拟中性点来确定反电动势过零点的方法。虚拟中性点使用图中所示的梯形电阻网络产生,然后将非励磁绕组中的反电动势与该中性点进行比较。这使得在所有可测量速度下,可相对容易地确定过零点。
图4a和4b显示了B相的过零检测电路。对于A相和C相,当其相应绕组未励磁时,应使用类似电路进行反电动势过零检测。
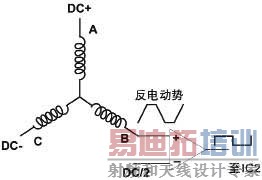
图4a 反电动势过零检测:与直流母线电压/2比较
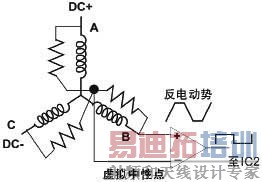
图4b 反电动势过零检测:与中性点比较
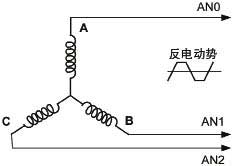
图4c 反电动势过零检测:使用片上ADC读取
反电动势过零检测的另一种方案是使用ADC,如图4c中所示。PIC18F2331单片机具有可用于此用途的高速ADC。通过使用分压器,可以将反电动势信号降到单片机可测量的电平。使用片上ADC对该信号进行采样,不断将采样值与对应于零点的数字值进行比较。当这两个值匹配时,就更新换向序列。该方法的优点是能够使测量更为灵活。当速度改变时,绕组电压可能会波动,导致反电动势的变化。这种情况下,单片机可以完全控制过零点的确定。此外,还可以采用数字滤波器来滤除反电动势信号中的高频开关噪声成分。
结论
BLDC电机与生俱来的优点使其可用来控制冰箱的压缩机和风扇,提高冰箱能效和降低噪声,同时支持无级变速。但是,BLDC电机需要通过驱动电路来进行电子换向。使用驱动电路可实现变速操作。此外,与根据制冷负载间歇性地起动和停止压缩机的传统方式相比,系统功耗更低。
使用Microchip的PIC18F2331系列单片机,可以实现几种以开环和闭环方式控制BLDC电机的方法,同时可以充分利用单片机中可用于电机控制的外设,减少所需的外部硬件。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
