- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于CAN总线的楼宇恒压变频供水监控系统设计与实现
录入:edatop.com 点击:
1 引言
传统的供水系统大部分仍然采用人工手动调整参数控制,生产过程中的重要参数仍然依靠人工定时记录,用水量的需求具有时变性,在用水高峰期时,管网压力达不到规定的标准压力,造成高层建筑断水;用水低峰期时,管网压力经常超过规定的压力上限,极易造成爆管事故并且能源损耗严重。同时传统的楼宇机电控制设备相互独立,不具备网络通讯的功能,难以实现非现场或远程监控。本文提出采用模糊PID算法加Smith预估补偿方式变频器恒压控制供水系统具有运行经济、可靠性高、节能效果明显等优点,利用CAN现场总线技术构成的底层控制网络,采用了分布式结构和分散控制原理,具有使用方便、易于扩展等优点,能有效地满足楼宇监制系统在远程监控的实时性和可靠性要求。
楼宇供水系统采用“通用变频器+单片机(包括PID调节器)+工频/变频切换”的控制方案。现场控制器能够完成现场管网压力反馈值的数据采集、压力给定值的输入、模糊PID调节运算,最后将控制量送入变频器,控制水泵电机的转速,达到恒压供水的目的;同时通过CAN现场总线接收来自CAN其他节点(主要是上位监控计算机)的命令或者主动将自身的数据发送到CAN总线上供上位监控计算机接收,实现人机交互功能。
2 系统的硬件设计
2.1 基于CAN总线远程监控楼宇自动化系统的硬件设计
CAN(Controller Area Network)总线是一种支持分布式实时控制系统的串行通信局域网。其信号传输采用短帧结构,每一帧的有效字节数为8个,因而传输时间短,受干扰的概率低。由于其高性能、高可靠性、实时性等优点,已广泛应用于控制系统中的检测和执行机构之间的数据通信。CAN总线符合ISO11898标准,最大传输速率可达1MB/s(传输距离最大为40m),最大传输距离为10km(传输速率约为5k)。
基于CAN总线远程监控楼宇自动化系统的构成由计算机和各个智能节点组成,如图1所示。计算上安装具有高性能价格比的CAN 总线通讯接口卡PCI-9820 非智能两通道CAN 接口卡,该产品采用标准PCI 接口,能让计算机方便的连接到CAN 总线上,实现CAN2.0B 协议(兼容CAN 2.0A )的连接通讯。PCI-9820 接口卡配备两通道逻辑独立CAN 接口,使得在开发应用中更显方便和灵活:每个通道光电隔离,保护计算机机避免地环流的损坏,增强系统在恶劣环境中使用的可靠性。
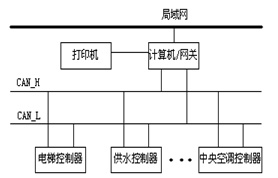
图1 楼宇供水系统的构成图 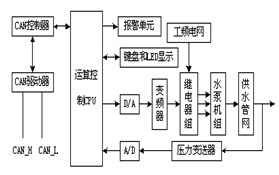
图2 供水系统现场控制器的组成框图
本系统与DCS控制系统不同的是它的拓扑结构中不是所有的下位机都以上位机为中心,而是所有的节点都以“平等主体”的形式挂接在总线上,上位计算机仅仅作为CAN的一个平等智能节点。
2.2 楼宇供水系统现场控制器的硬件设计
楼宇恒压供水系统可分为:CPU模块、人机接口模块(包括键盘输入、LED显示电路)、A/D和D/A转换模块、DI/DO模块、CAN通讯模块五部分,如图2所示。
CPU模块中采用了ATMEL公司片内具有4KB FLASH ROM的单片机芯片AT89C51。为提高系统的可靠性,采用了具有电压监测、集成看门狗(Watchdog)的MAX1232芯片,可有效地防止程序的弹飞。A/D和D/A转换模块中信号输入电路主要是把压力变送器的电流(4~20mA)输出信号,经过电流电压变换芯片RCV420放大滤波转换成0~5V的电压模拟信号,通过ADC0809模数转换,最终把采集到的多路模拟量信号转换成数字量信号;同样,经CPU模糊PID运算处理后,通过数模转换器AD558变换成0~10V的电压信号,控制变频器的输出转速。
本设计采用一片8255进行I/O扩展,8255的A口用于CAN网通讯的ID设置;8255的B口用于开关量的输入,外部的水位检测等开关量,经光电耦合输入到8255的B口;8255的C口用于开关量的输出,用于控制接触器组,使其处于不同的接通和断开状态,单片机的控制信息从8255的C口输出,经驱动和继电器隔离控制接触器动作,产生相应的控制信号。 [p]
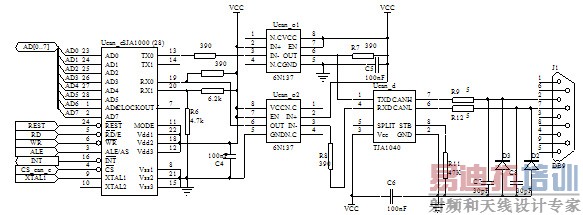
图3 供水系统CAN通讯模块电路原理图
在CAN总线通信功能中硬件电路设计中,采用了PHILIPS公司的独立CAN通信控制器SJA1000和CAN总线接口TJA1040组成的CAN总线接口电路如图3所示。CAN总线节点的发送与接收是通过事先设置验收码和验收屏蔽码可以控制智能节点从总线上接收哪些数据或命令。SJA1000由微控制器89C51通过8位地址数据复用总线和读写控制信号进行控制。SJA1000的中断请求信号INT端连接至89C51的外部中断输入INT0端,CAN通信控制器可通过中断与微控制器进行数据传输。SJA1000的发送输出端TX0与接收输入端RX0、RX1分别经高速集成光电耦合器6N137隔离后与CAN总线接口芯片TJA1040相连,6N137中的光敏器件采用了光敏二极管,可以满足高速数字信号的传输,实现了CAN总线与节点间的隔离传输,有助于提高节点装置的安全性和可靠性。
3 楼宇变频恒压供水监控系统的软件设计
3.1楼宇变频恒压供水系统控制器的软件设计
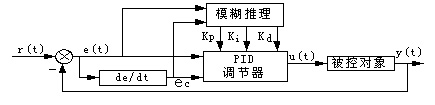
图4参数自整定模糊控制PID控制器的结构图
模糊控制是一种以模糊集合论、模糊语言变量与模糊逻辑推理为基础的计算机数字控制。模糊控制器由三部分组成:模糊化、模糊推理和解模糊。由于恒压供水调速系统由水泵、电机、变频器等多个环节所组成,整个系统涉及较多的参数,部分参数在系统运行过程中是变化的。水泵工作特性具有很强的非线性,管路水头的变化以及电力负载及其特性的变化等都将导致水泵运行工况点的改变,从而改变了系统参数。对于这样的控制对象,常规的PID控制器难以保证系统在任何工况条件下始终具有最佳的控制性能。本文采用参数自整定模糊PID算法,以误差e和误差变化率ec作为输入,可以满足不同时刻偏差e和误差变化率ec。参数自整定模糊控制PID的参数自整定思想就是先找出控制器的3个参数KP、KI和KD与偏差e和偏差变化率ec之间的模糊关系,在运行中通过不断的检测e和ec并将它们作为控制器的输入,由控制器根据模糊控制规则对3个参数进行在线调整,以满足不同e和ec对控制器参数的不同要求,从而使被控对象具有良好的动、静态性能。对PID参数自调整的要求,利用模糊控制规则对PID参数进行修改便构成了参数自整定模糊控制PID系统。参数自整定模糊控制PID控制器的结构如图4所示。
在供水控制的过程中,由于时间滞后现象存在,对系统的控制性能产生不利影响,尤其是时滞较大时。在供水系统中,时滞现象导致系统的动态性能较差。虽然模糊PID控制大大减小了系统参数变化对系统控制性能的影响,但是它没有从根本上解决系统的大时滞问题。在设计供水系统的模糊PID控制器的过程中,我们通过引入Smith预估控制,将两者结合起来设计了具有Smith补偿的模糊PID控制器,取得了较好的应用效果。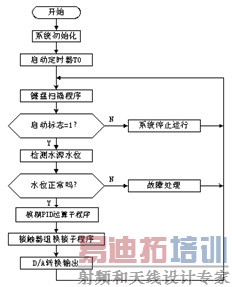
图5 系统主程序流程图
供水系统现场控制器的软件设计大体可以分为三个部分:一部分为初始化,包括单片机的初始化和CAN控制器的初始化;第二部分为现场水压的采样、运算和控制输出;另一部分为作为CAN节点要完成的自身数据发送和来自其他节点(包括上位监控计算机)的控制命令与参数。具体实现上系统软件有主程序、定时器T0中断程序、外部CAN通讯INT0中断程序三部分构成。主程序主要完成系统初始化、键盘扫描、模糊PID运算、水位故障处理等,如图5所示。
在本设计中定时器T0中断是本供水系统进行现场控制中重要的程序,包括管网压力采样、管网压力显示、中值滤波、CAN发送子程序等模块程序。定时器T0当工作于模式1时,最大定时时间为65.536ms,为了实现定时1s。定时器T0中断的流程图如图6所示。现场控制器采样的管网压力,如果要进行远程监视的话,必须通过通讯总线把压力值传送到上位机中,同时,现场控制器也应该接受来自上位机的控制命令,例如:紧急情况下,上位机发出的停止水泵运行的命令等,由于控制信息实时性的要求。本设计中采用了INT0中断方式作为CAN通讯接收信息的程序。INT0中断程序流程图如图7所示。 [p]
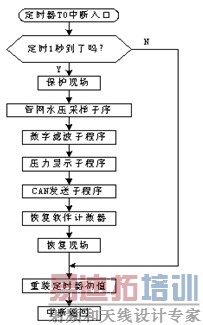
图6 定时器T0中断的流程图 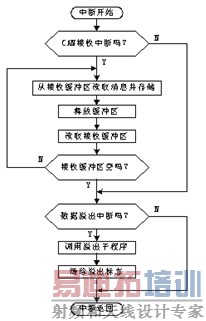
图7 CAN中断接收程序流程图
3.2楼宇变频恒压供水系统计算机的监控软件设计
系统的监控软件采用VC6.0来编程施实现的。软件总体设计的任务是确定软件的总体结构、子系统和模块的划分,并确定模块间的接口和评价模块划分的质量,以及进行数据分
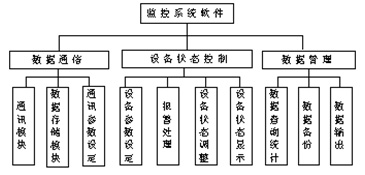
图8 系统软件整体结构框图
析。本设计根据软件总体设计的要求和过程,对系统的信息管理及监控程序按不同的功能进行功能分解,划分为不同的模块。供水自动化计算机控制系统的信息管理及监控软件主要包括数据采集和通信、设备状态控制和数据管理三个部分。数据采集和通信部分采集水位、压力、流量、电压和电流等数据,用于记录、存储和分析,以及与CAN通信。设备控制部分根据采集到的数据判断系统当前的运行状态,并可通过修改运行参数对设备工作状态进行调整。数据管理部分负责数据的统计、查询以乃打印输出,还有数据库的备份和维护。系统软件整体结构框图如图8所示。
6 结束语
经系统实践调试,该智能节点的设计和实施方案是成功的。能够可靠的运行和完成要求的任务,控制信息在现场进行处理,而管理层则在上位机中实现。体现了CAN总线高性能、高可靠性的特点,实现了楼宇自动化系统的远程或集中监控的目的。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
