- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
现场总线技术在并联逆变电源系统中的应用
录入:edatop.com 点击:
随着现代社会经济的迅猛发展,对供电系统的容量和可靠性提出了更高的要求。传统的集中供电模式由于其成本高、可靠性差已被证明不能满足需要,新型的分布式供电模式成为当今电源技术发展的趋势,它促使逆变电源向智能化,数字化的方向发展。为了实现稳定可靠的分布式电源系统,逆变器的并联技术显得尤为重要。现场总线技术最早用于过程控制领域,现在已渐渐成为工业自动化领域的热点,将现场总线技术应用在逆变电源系统上,无疑将更好地实现该系统的智能化。
1 逆变器并联技术分析
多台逆变器并联运行时应满足下列条件:各逆变器的交流输出电压要保证同频、同相、同幅,否则就会在各逆变器之间引起环流,影响系统的稳定运行,甚至造成严重的事故。下面以2台逆变电源对同一负载供电为例进行分析,等效电路图如图1所示。
设X1=X2,则由上述公式可得出结论:在逆变电源系统中,各逆变单元的相位角之差将导致有功功率的差异,从而形成有功环流;各逆变单元输出电压的幅值差将导致无功功率的差异,从而形成无功环流。在相位同步的前提下,本文提出了一种利用现场CAN总线来实现逆变电源系统各逆变单元均流的方案。
2 现场CAN总线简介
控制器局部网(Controller Area Network,CAN)是BOSCH公司为现代汽车应用领先推出的一种多主机局部网,由于其卓越性能现已广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门。
CAN总线是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。通信速率可达1 MB/s。它的总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等工作。CAN采用非破坏性仲裁技术,当两个节点同时向网络上传送信息时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响地继续传输数据,有效避免总线冲突。CAN节点在出现严重错误的情况下,具有自动关闭输出的功能,切断它与总线的联系,以使总线上其他操作不受影响。
CAN通信协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。采用这种方法的优点是:可使网络内的节点个数在理论上不受限制,数据块的标识码可由11位或29位二进制数组成,因此可以定义211或229个不同的数据块。这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有用。数据段长度最多为8个字节,同时8个字节不会占用过长的总线时间,从而保证了通信的实时性。CAN协议采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。
3 基于DSP2407A的CAN总线设计
TMS320LF2407A(DSP2407A)是美国TI公司推出的新型高性能16位定点数字信号处理器,它专门为数字控制设计,其集DSP的高速信号处理能力及适用于控制的优化外围电路于一体,在数字控制系统中得到广泛应用。TMS320LF2407A系统组成包括:40 MHz,40 MIPS的低电压3.3 V CPU、片内存储器、事件管理器模块、片内集成外围设备。TMS320LF2407A包含2个专用于电机控制的事件管理器模块EVA和EVB,每个事件管理器模块包括通用定时器(GP)、全比较单元、正交编码脉冲电路以及捕获单元。TMS320LF2407A片上CAN控制器模块是1个16位的外设模块,该模块完全支持CAN2.0 B协议,6个邮箱(其中0,1用于接收;4,5用于发送;2,3可配置为接收或发送)每次可以传送0~8个字节的数据,具有可编程的局部接收屏蔽、位传输速率、中断方案和总线唤醒事件、超强的错误诊断、自动错误重发和远程请求回应、支持自测试模式等功能,因此选择该DSP芯片作为CAN总线的控制器。收发总线上的数据将由CAN控制器中的6个邮箱(mail-box)完成,通过设置每个邮箱中的屏蔽寄存器可以对来自总线上的数据进行筛选,丢弃一些无用的信息。利用CAN总线作为并联逆变器系统的通讯总线,将每个逆变器的编号和输出电流、电压等信息在每个工频周期中发送给位于总线上的其他逆变器,这样每个逆变器都可以计算出自己的理论输出电压值,即所有逆变单元的平均电压值。根据这个值与自身实际输出电压值的误差,来调节各单元的输出电压值,最终实现并联逆变电源的均流控制。 [p]
3.1 系统硬件结构设计
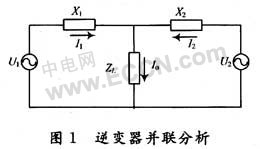
CAN总线收发器选用Microchip公司的MCP2551,MCP2551是一个可容错的高速CAN器件,可作为CAN协议控制器和物理总线接口。MCP2551可为CAN协议控制器提供差分收发能力,它完全符合ISO-11898标准,包括能满足24 V电压要求。它的工作速率高达1 Mb/s。RS引脚可选择3种操作模式:高速、斜率控制、待机。在本系统中为了通过限制CANH和CANL的上升下降时间来进一步减少EMI,选用斜率控制模式。系统硬件设计图如图2所示。
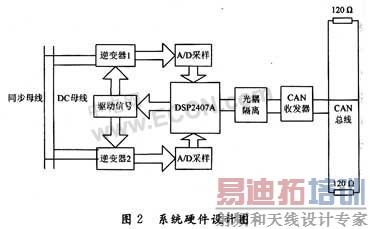
MCP2551引脚图如图3所示。
为了增强CAN总线节点的抗干扰能力,MCP2551与DSP 2407A的CAN控制器之间加一个光耦隔离6N137,这样可以很好地实现CAN总线节点间的电气隔离。
3.2 软件设计
CAN节点通信的功能是将本节点的数据信息通过CAN总线以广播形式传给网络上的其他节点,并且接受其他节点传来的信息。因此软件的设计可以分为3部分:系统的初始化、信息的定时发送和中断接收。主程序在完成初始化后打开中断,在TMS32LF2407A的数据采集中断服务中对模块的输出电流进行采样,在一个工频周期结束后,计算逆变器的输出电流值和对各模块进行编号,通过定时发送程序,每隔2 ms就向CAN总线上发送1次,按照既定的均流算法,进入下个循环周期。在中断接收程序中,存储数据到接收缓冲区,供主程序使用。
4 仿真实验结果
在Matlab 6.5软件平台上对上述方案进行仿真。仿真参数如下:输入电压为DC48 V,输入电流为14 A(220 VDC,3 kVA),单台输出电流为14 A,输出频率为50 Hz。逆变器采用电压电流双闭环控制,L=2.7 mH,C=4.5 μF,并机数量为2台。其中电流环采用P调节,电压环采用P1调节,设定P=5。仿真算法采用变步长的ode23tb,仿真时间为0.05 s,采样时间为0.002 s。仿真结果如图4、图5所示。
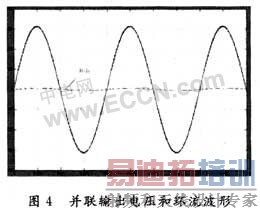
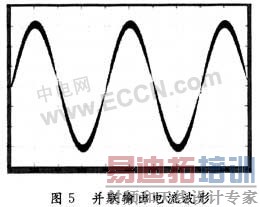
由图4可看出,将CAN现场总线引入本系统中,可达到较好的均流效果。在图5中,当实现并机时,两台逆变器输出电流分别为6.8 A,6.9 A,可以很好地实现分担负载的任务。
5 结 语
本文将现场CAN总线引用到并联逆变电源系统中,较好地解决了并联逆变电源普遍存在的环流问题,提高了系统的稳定性和抗干扰性。同时真正实现(N+X)并联冗余,可以在不断开负载的情况下通过热插拔增加或减少并机模块,利用CAN总线的特点,使得整个系统不受影响。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:道路车辆监控管理平台方案分析
下一篇:智能汽车防撞报警器的设计开发
射频和天线工程师培训课程详情>>
