- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于CAN总线的电梯呼梯控制器的设计与实现
录入:edatop.com 点击:
1 引言 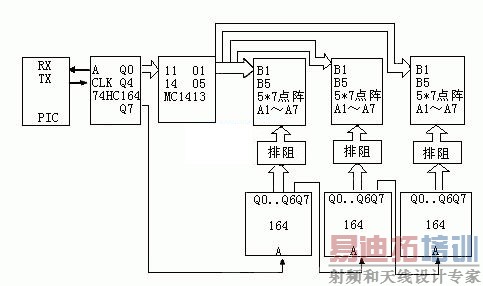
目前电梯的生产情况和使用数量成为一个国家现代化程度的标志之一。电梯是机电一体的高层建筑的复杂运输设备。它涉及机械工程、电子技术、电力电子技术、电机与拖动理论、自动控制理论等多个科学领域。电梯呼梯控制器是电梯的一个重要组成部分, 位于每一层楼电梯门的左边或者右边,是每一层楼的呼叫装置,用于给出每一楼层的呼叫请求信息,并显示电梯当前运行情况。乘客可以通过显示器、按键等了解到电梯运行的大量信息。本文采用CAN总线技术设计呼梯控制器,各控制器之间只需一对双绞线以一定的网络拓扑结构连接即可,安装极为方便,且可靠性高。对于不同楼层数的控制系统只需在CAN总线中加入相应数目的呼梯控制器即可,主控制器硬件软件不需做任何改动,使得电梯控制系统安装更加灵活和方便。
2 电梯呼梯控制器简介
电梯呼梯控制器是电梯系统的呼叫部分,按照功能来说,呼梯控制器包括三大部分:电梯显示单元、呼叫接收单元和通信单元。
(1)显示单元:
呼梯显示单元是乘客与电梯之间人机交流的部分,它的作用是电梯门区等待电梯的乘客能够及时的了解电梯当前所在运行楼层,电梯当前运行方向以及当前本楼层的呼叫情况。本系统采用两个8段发光LED作为楼层显示器,采用两个带有上下箭头LED作为电梯上下运行的方向显示器,呼梯控制器通过与主控进行通信,获取当前电梯情况并显示出来。
(2)呼叫接收单元:
当乘客需要乘坐电梯时,乘客需要通过每层楼中的呼梯面板上的两个呼叫按钮进行呼叫,给电梯控制系统发出上呼(需要到达当前楼层以上的地方的呼叫)和下呼(需要到达当前楼层以下的地方的呼叫)请求。呼梯控制器接收到呼叫请求后,经过处理,通过通信单元发送给主控制器。
(3)通信单元:
在传统的电梯控制系统中,呼梯和主控之间通信是采用点对点的通信方式,即I/O直接控制方式,主控器通过16根楼层显示线、2根方向显示线、2个呼叫登记等多根信号线直接与每一层楼的呼梯板进行直接连接,当电梯楼层增加时,使得系统连线异常复杂。因此,本系统采用CAN总线完成呼梯与主控之间的通讯,大大简化了系统结构。
3 系统硬件设计
电梯呼梯控制器采用PIC18F258单片机作为核心,该单片机自带CAN收发接口。外围电路由CAN驱动模块、输入模块、显示模块及拨码开关、上按键、下按键和调试接口等组成。电梯呼梯控制器作为CAN总线网络的一个节点,CAN驱动模块是呼梯控制器和物理总线间的接口,提供对CAN总线的差动发送和接收功能;输入模块接收主控发出的上呼,下呼以及到站开门信号等, 这些信息按照通信协议的要求,经过处理后装入邮箱再发送到CAN总线上;显示单元包括按键灯显示、点阵显示和检修灯显示3个部分,其中点阵显示还能实现楼层数和方向箭头的滚动效果。
3.1 CAN驱动模块
CAN (Control Area Network,控制局域网络)最早是由德国BOSCH公司推出,用于汽车内部测量与执行部件之间的数据通信。其总线规范现已被ISO国际标准组织制定为国际标准,广泛应用在离散控制系统。CAN协议也是建立在国际标准组织的开放系统互连模型基础上的,但其模型结构只有3层,即只取OSI底层的物理层、数据链路层和最上层的应用层。其信号传输介质为双绞线。通信速率可达1Mbps/40m,直接传输距离最远可达l0km/kbps。可挂接设备最多为110 个。CAN属于一种有效支持分布式控制和实时控制的串行通信网络,采用了许多新技术及独特的设计。与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。
CAN收发器选用PHILIPS公司的PCA82C250,它是一种应用广泛的CAN控制器与物理总线间的接口芯片,能够对总线的信息进行差动发送和接收。为提高系统的抗干扰能力,在PCA 82C250和PIC18F258之间增加了高速光隔6N137。为了保证CAN总线的稳定性,CAN驱动模块的电源采用DC2405单独供电。
3.2 显示单元
呼梯控制器显示单元包括按键灯、楼层、方向箭头和检修灯的显示。传统的电梯都是用七段码来显示方向箭头和楼层数,本系统采用5×7的LED点阵显示屏来显示,并且可以让箭头和楼层数在电梯运行的时候进行滚动显示。PIC通过TX口发送4个8位串行信号,发送顺序依次为箭头方向,十位楼层,个位楼层和行选中。将上一个串行转并行器件74HC164的并行输出端Q7与下一个74HC164的串行输入端A相连,构成4个74HC164的级连,最先发送的箭头方向信号就被传送到最后一个74HC164上,后3个74HC164的输出端Q0~Q6分别连接3个点阵的列地址A1~A7,第一个74HC164的 Q0~Q4通过单向驱动器件MC1413连接3个点阵的行地址B1~B5。点阵采用扫描的方式,软件中每隔1ms输出一行,因此5行只需要5ms的时间, 人眼不会感到闪烁;列信号每隔50ms移一位,因此可以产生箭头和楼层数的滚动效果。当电梯出现故障时,单片机通过I/O口输出高电平来点亮检修灯。点阵显示原理图如图1所示。
3.3 呼叫单元
呼梯控制器中还包括拨码开关、上按键、下按键和调试接口。拨码开关用来设置该呼梯控制器所在楼层的楼层号,当电梯上行或下行时,主控制器将当前电梯所在的楼层号与乘客预期到达的楼层号相比,如果相同则电梯停止运行,如果不同则继续上行或下行,同时箭头向上或向下滚动。上、下按键是乘客发出呼叫的部分,呼梯接收到呼叫请求后,经过处理,通过通信部分发送给主控制器。调试接口是用来下载程序或仿真调试。仿真器选用贝能公司的ICD2。 [p]
图1 LED点阵显示屏硬件原理图
4 系统软件设计
4.1 CAN通信软件设计
本系统中CAN模块工作于配置模式和正常工作模式。首先在配置模式下将控制和状态寄存器,波特率控制寄存器,I/0控制寄存器,中断标志和控制寄存器,接收掩码寄存器和接收滤波寄存器按照系统要求设定好,以保证CAN总线畅通。此寄存器只能在配置模式下进行设定,设定完毕后进入正常工作模式。上位机和下位机都将各自的CAN接收中断打开,等待CAN总线传送来的数据。
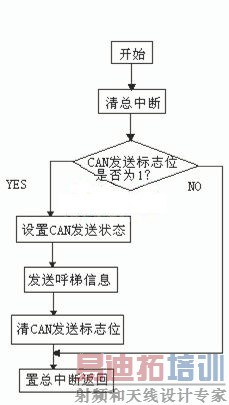
当发送呼梯信息时,CAN的16位设置CAN发送的格式、数据桢和位数据;17位存放楼层号作为ID号;18位设为0;19和20位存放上行信息,有上行信息就发送2个字节FFFFH,如果没有就发送0000H;21和22 位存放下行信息。CAN模块发送数据流程图如图2所示。
4.2 主程序设计
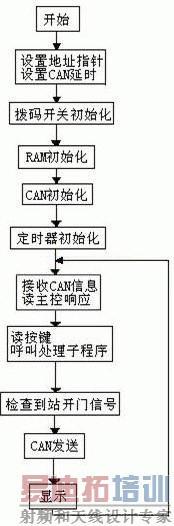
软件要实现拨码开关的初始化设置、 CAN的初始化设置、读主控响应并接收从CAN总线传来的信息、处理按键呼叫子程序、CAN发送以及点阵显示。程序主流程图如图3所示。
图2 CAN模块发送数据流程图
图3 程序主流程图
5 结束语
本文以PIC18F258为核心,设计了具有CAN通讯接口的电梯呼梯控制器,经过近1年的现场使用,表明该控制器具有良好的功能特性和极高的可靠性,现场抗干扰能力强,而且性能价格比较高。系统结构简单,安装方便,是未来电梯控制系统发展的趋势,目前已经成功地投入批量生产。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
