- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于降压型LED恒流驱动的滞环控制电路设计[ ]
录入:edatop.com 点击:
本文设计了一款降压型LED恒流驱动芯片的滞环控制电路。该芯片采用高边电流检测方案,运用滞环电流控制方法对驱动电流进行滞环控制,从而获得恒定的平均驱动电流。设计采用简单的设计理念实现恒流驱动,不需要复杂的电路分析,能实现精确的电流控制,且自身具有稳定性。芯片采用0.5μm 5V/18V/40V CDMOS工艺研制,电源电压范围为4.5V~28V,工作温度-40℃~125℃,可为LED提供恒定的350mA驱动电流,通过调节外部检测电阻,可调节恒定LED驱动电流。外部提供DIM信号,通过DIM的占空比来调节LED的亮度。Hspice仿真结果显示:LED驱动电流为滞环变化的三角波,恒流精度小于6.2%。
1 引言
目前,LED的驱动方式有恒压和恒流驱动两种,其中,恒流驱动是常用方式。恒流驱动消除温度和工艺等因素引起正向电压变化所导致的电流变化,保证恒定的LED亮度。在LED恒流驱动控制模式中,滞环电流控制模式具有诸多优点:结构简单、自稳定、不易因噪声而发生不稳定振荡等,使用日益广泛。MAXIM公司的MAXIM16819就是LED恒流驱动芯片。
文中实现了一种简单的滞流控制模块,通过模块内部自建滞环比较电压,结合DIM控制端的PWM信号控制功率开关管的通断,实现对LED的恒流控制。
2 电路设计与原理分析
2.1 滞环控制原理
滞流控制模块应用如图1所示,LED驱动电流的变化反应在检测电阻RSENSE两端的压差变化上。本设计中,检测电阻设为0.5Ω,较小的检测电阻有利于降低功耗和保持较高的转换效率。滞环电流控制模块内部自建两个电压阈值,检测电压Vcs与阈值电压进行比较,比较结果和DIM调光信号相与来控制功率开关管的通断。
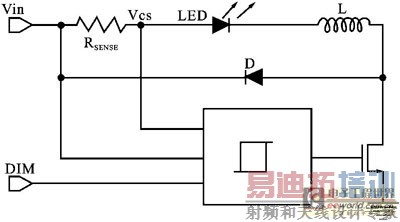
图1 滞流控制模块应用图示
使用PWM调光,在减少电流占空周期内给LED提供完整电流,例如要将亮度减半,只需在50%的占空周期内提供完整的电流。通常PWM调光信号的频率会超过100Hz,以确保这个脉冲电流不会被人眼所察觉。
滞流控制模块内部电路如图2所示,当DIM信号为高电平期间,当Vcs大于上电压阈值时,控制电路输出低电平,关闭功率开关管。由LED、电感L 、续流二极管D和RSENSE组成的回路使得电感继续为LED提供电流,电感电流逐渐减小,使得检测电压Vcs随之减小;当Vcs小于下阈值电压时,控制电路输出高电平,导通功率开关管,此时D截止,形成从电源经RSENSE、LED、L和功率开关管到地的回路,电源为电感L充电,电感电流上升,检测电压Vcs随之升高。Vcs大于上电压阈值时,控制电路关断开关管,重复上个周期的动作,这样就完成了对LED驱动电流的滞环电流控制,使得流过LED的驱动电流,也就是电感电流的平均值恒定。
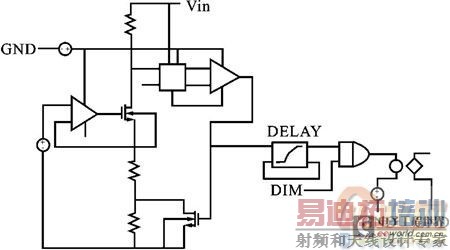
图2 滞流控制模块内部模块
2.2 滞环比较电压产生电路
4.5V~28V的输入电压经调整转换为5V的恒定电压Vcc为后续电路供电。如图3所示,A点电位受运算放大器控制,将等于参考电压1.2V,假设输出Vout为高电平,则M2导通,流过M1的电流为IM1=Vref/R2,B点的电压为VBL=Vin-IM1 R1;当Vout为低电平,M2截止,流过M1的电流变为I′M1=Vref/(R2+R3),B点电压升高为VBH=Vin-I′M1 R1,所以B点电压的变化为ΔVB=VBH-VBL=Vref R1 R3/R2(R2+R3),这意味着Vout由高电平变成低电平时在B点产生的一个滞环电压,可见该滞环电压与输入电压无关,只由参考电压Vref和电阻大小决定,通过选择各电阻的阻值便可设定滞环电压的大小。
[p]
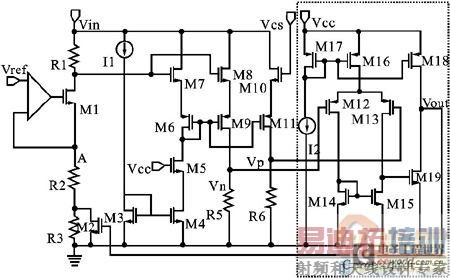
图3 滞流比较电压产生电路
2.3 运放实现电路
以上分析可知运算放大器起着重要作用,其必须具有较高的增益,才能使A点电压精确跟随参考电压,从而准确设定B点电平和滞环电压大小。另外由于Vout的变化频率与系统开关频率相同(系统的最大开关频率约为2MHz),使得流过M1的电流也相同频率在IM1和I′M1之间快速切换,所以运放的单位增益带宽须大于系统的最大开关频率。设计的运放结构如图4所示,采用折叠式输入结构,可以获得较大的共模输入电压范围。
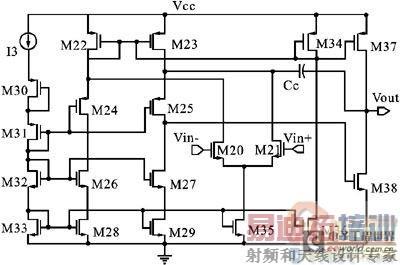
图4 运放实现电路
由运放的频率特性仿真图5可知,增益达到84.266dB,相位裕度108°,单位增益带宽约12MHz,满足电路要求。
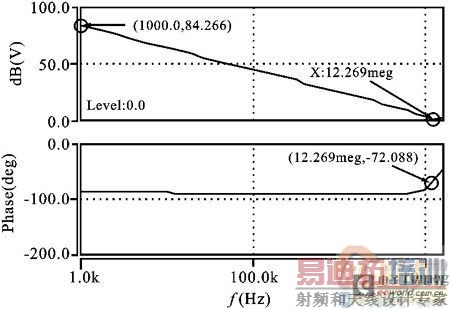
图5 运放频率特性仿真
2.4 平均驱动电流设定
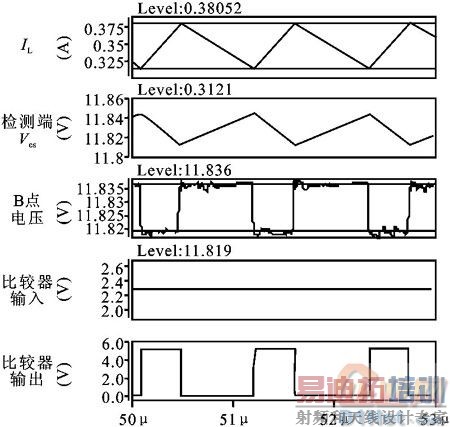
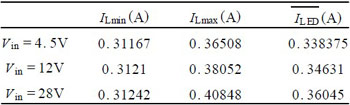
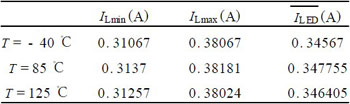
运放将点A电位钳位于带隙电压基准上。由M7-M8、M6-M9组成的级联电流镜将偏置电流I1镜像到M8-M9-R5所在支路,所以Compara2tor模块的一个输入端电压Vn保持一定,另一输入端电压Vp将跟随检测电压Vcs变化。当比较器输出Vout为高电平(开关管导通)时,B点电压为VBL即下限阈值检测电压VCSMIN,当Vcs下降到此阈值时,由M6~M11组成的对称电路结构使流过R5、R6的电流相等,此时Vn=Vp。若Vcs 滞环电流范围: 上式决定了驱动电流的纹波大小。 3 仿真结果分析 文中电路采用0.5μm 5V/18V/40V CDMOS工艺,用Hspice Z-2007.03进行仿真。在脉冲宽度为200μs、周期为300μs的DIM信号和Vin=12V(典型值)的共同作用下,仿真结果如图6所示。 图6 Vin="12V时的电路仿真" 分别在Vin=2.5V,Vin=28V的情况下,再次对LED驱动电流进行仿真,三次仿真数据结果分别如表1所示。 表1 三种输入电压情况下的驱动电流 在Vin=12V时,对LED驱动电流进行温度特性仿真,三次仿真波形结果分别如表2所示。可以看出,芯片的温度特性较好。 表2 Vin="12V情况下三种环境温度下的驱动电流" 由于系统的固定延时τ对电流的纹波存在影响,实际的驱动电流峰值是IMAX +τoff di/dt,电流谷值是IMIN-τON di/dt,τoff为从驱动电流大于设定值到功率开关关闭的系统延时,τon为从驱动电流小于设定值到功率开关导通的系统延时,di/dt是电感电流变化率。则电感若取较大值,对驱动电流平均值影响不大,但可以减小电流纹波,反之,这是以增加外部电感体积为代价的。 电路可达很高的效率,一方面检测电阻中的功耗 会导致电源功率耗散,但本设计中RSENSE=0.5Ω,则PRSENSE相当小,另一方面,系统效率定义为LED消耗的功率与电源提供的功率之比,即η=PLED/PPOWER。其中,PPOWER=Vin3 Ivin,PLED=VLED*,从仿真可知,Ivin的平均值远远小于,所以系统的效率可以达到非常高。 4 结束语 文中设计了一款适用于降压型LED恒流驱动芯片的滞环控制电路。采用高边电流检测方案,运用滞环电流控制方法对驱动电流进行滞环控制,从而获得恒定的平均驱动电流,通过调节外部检测电阻,可调节恒定LED驱动电流。芯片采用015μm 5V/18V/40V CDMOS工艺,电源电压范围为4.5V~28V,可为LED提供约恒定的350mA驱动电流,温度特性-40℃~125℃,可达到相当高的效率。当Vin从4.5V变化到28V时,平均驱动电流变化22mA,最大恒流精度为6.2%。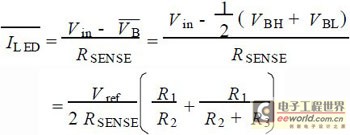

射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:开关电源产生电磁辐射干扰的原因
下一篇:飞轮储能技术在UPS系统中的应用
射频和天线工程师培训课程详情>>
