- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
改进峰值电流模式控制
录入:edatop.com 点击:
最糟糕的设计方案通常会在最低输入电压下产生最大输出功率。而在现实情况中,高输入线路的最大功率可能是最低输入线路电压所输送功率的两倍。这会迫使电源设计人员必须对功率级进行过量设计。本文将探讨输入功率增加的原因以及降低方法。此外,还将介绍一种可提升峰值电流模式控制性能的创新方法。
反向转换器变压器基本上由两个耦合电感器组成。当主开关接通期间,电能被储存在主耦合电感器中。由于变压器具有一次绕组和二次绕组配置,因而当主开关接通时,输出二极管 (D1) 会被反向偏置(图1a–1b)。当主开关断开时,会将储存在主耦合电感器中的电能传送到输出耦合电感器中,作为驱动负载的能量。反向变压器能对输出电压进行升压或降压转换,并提供输入到输出的隔离。
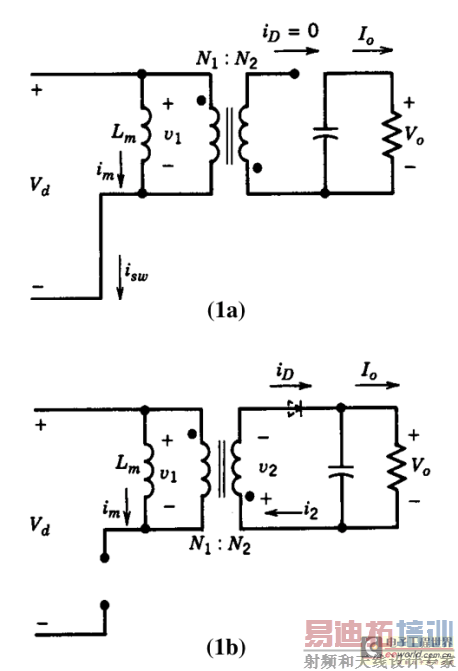
图 1.1a) 主耦合电感器中存储的电能;1b)电能传送至二次绕组
峰值电流模式控制
出于对成本和简约性的考虑,反向转换器通用采用峰值电流模式控制,因而不能直接测量输出电流。当反向转换器出现过载故障时,输出电压就会下降。这样,反馈补偿电压就会升高至脉宽调制 (PWM) 控制器限流阀值之上,而且 PWM 会在逐脉冲过限流限制 (pulse-by-pulse current limit) 模式下运行,这时反馈电压不再控制 PWM 占空比。当峰值主电流超过 PWM 控制器限流比较器电压参考值 (VCS) 时,终止占空比。
峰值电流模式控制面临的挑战
当控制器处于逐脉冲过限流限制模式下时,主开关无法即时关闭。在 PWM 和功率级内存在传播延迟,其中包括控制器的前沿消隐 (LEB),在限流比较器、逻辑电路、栅极驱动器中的传播延迟,以及功率 MOSFET 的关闭延迟。传播延迟会导致峰值主电流因过冲而高于预期值。
方程式 1计算实际峰值主电流:
(1)
计算出峰值主电流后,我们可用方程式2来计算输入功率:
(2)
 (1)
(1) (2)
(2)这些传播延迟可以长达数百纳秒。我们能使用方程式3来计算主电流的斜率,其中 VIN为整流直流线路电压,LP为变压器的初级电感,
dt
为总传播延迟。
(3)
若传播延迟 (方程式 3中的 dt)保持不变,那么当 VIN增大时,主电流斜率也会相应增大。由于存在传播延迟,最大 VIN下的峰值电流会因过冲而高于最小 VIN下的峰值电流(图2)。
 (3)
(3)
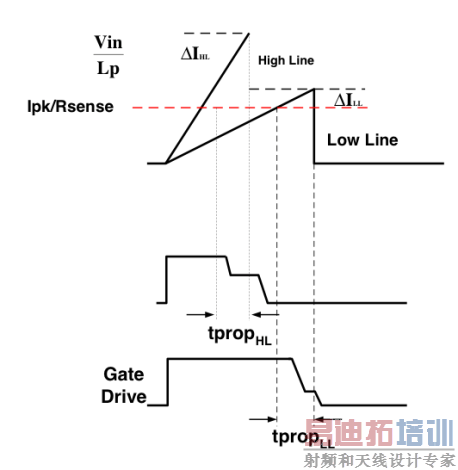
图 2.传播延迟与 VIN的关系
结果是输入和输出功率随着输入线路电压的增大而增大。可举例说明这一问题。峰值主电流(方程式4)能根据如下系统要求得出:
(4)
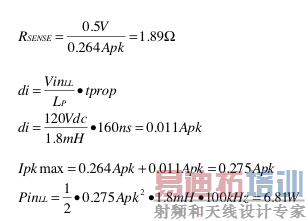
对于峰值电流模式控制,我们能在计算峰值电流后确定电流感应电阻值大小(方程式5)。
(5)
VCS为 PWM 限流比较器电压参考 (0.5V)。最小输入电压下的峰值电流过冲是:
在最大输入线路电压下,峰值电流是(方程式6):
(6)
 (4)
(4) (5)
(5) (6)
(6)射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:如何在谐振
LLC
半桥中实施同步整流器
下一篇:降压稳压器的效率及尺寸权衡
射频和天线工程师培训课程详情>>
