- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
应用于实验柜的排风控制系统的方案
录入:edatop.com 点击:
引言
通风柜控制器是通风柜上面的微电脑控制器。利用微机执行繁杂的逻辑计算与控制,来管理通风柜上的各种机电设备的运行情况。与利用传感器器取出通风柜各项物理参数以供操作者使用。利用微机可以极大提高各种设备的运行可靠性与简化系统设备的繁杂性。本设计采用的是PID控制,使排风风速能稳定在用户设定的面风速。由于采用了液晶显示器,操作简单,直观。多种工作模式(待机、强制排风、有人/无人排风)使本装置更节能实用。采用了先进的风速标定方法,能更精确地检测实际风速,从而实现实时、准确的排风控制。
1 工作原理
实验室产生的有毒有害气体必须及时排除,在衡量通风柜的标准是要满足:有害气体不能溢出也不能再柜内产生紊流。所以,面风速即通风柜窗口的平均风速,是衡量通风柜性能的主要技术参数。
国家对通风柜面风速规定标准为:0.4~0.6 m/s.排风量(单位:m3/h)计算公式为:
L=3 600×SVβ (1)
式中:S为操作口开启面积(单位:m2);V为面风速(单位:m/s);β为安全系数(1.05~1.1)。
从式(1)可以看出,对于没有调节系统的通风柜,当操作门全开时,如果满足0.3~0.5 m/s的面风速,当操作门开启一半或全关闭时,面风速将超过设计值,大大影响排风及实验效果。
因此,如何有效地控制面风速是对通风柜排风的有效保障。本设计采用了柜门行程及风速控制法,能使柜门处于不同高度是通风柜面风速保持在设定值。
通风柜的实际通风量可用下式表示:
Q=SV=SWH (2)
式中:S为操作口开启面积(单位:m2);V为面风速(单位:m/s);W为通风柜的开口宽度(单位:m);H为通风柜开窗高度(单位:m)。采用柜门上的传感器将柜门的行程信号变送到控制器,控制器根据设定的面风速和式(2)计算出设定的风量信号,进而可以得出在当前柜门高度下,要得到设定风速所需的阀门开度。再根据风速传感器测出的实时风量并转换成相应的阀门开度的电信号。在ARM内通过PID控制得出一个输出电压,控制阀门开度,从而实现风速控制。
2 系统结构
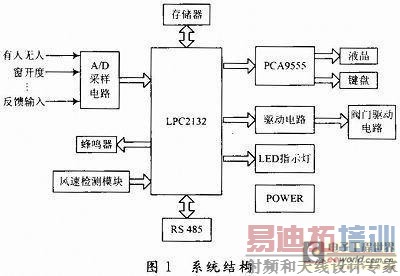
通风柜控制器电路的主要功能是完成响应外界环境的输入,如有人无人状态输入、窗开度、反馈输入量、人工设定输入量等。通过判断和计算,输出一定的电压控制文丘里阀门,形成一个闭环控制。控制器将当前排风柜的排风量通过RS 485总线传输到补风控制器,与上位机之间通过ModBus协议通信,也采用RS 485总线形式,选用RSM 485低功耗芯片做电平转换。在实施监控和参数设置时,可以批量进行,大大简化了操作量。上位机软件可用LabVIEW或者VB开发。
硬件电路包括人机交互电路,如键盘,液晶,蜂鸣器;A/D采样电路,如有人无人A/D电路,窗开度A/D电路,反馈输入A/D电路;D/A电路;风速检测电路及串口通讯部分。系统结构如图1所示。
2.1 A/D采样及D/A输出
A/D,D/A电路主要实现电压转换匹配及模拟信号滤波等功能。模拟信号分别为窗高度输入Hx:通过拉线变阻器或者超声波测距实时采集控制柜窗口高度,输入信号字0~10 V范围内线性变化,用于获得期望风量;阀门反馈输入f:阀门开度反馈,反应当前实时风量。0~10 V线性变化;有人/无人输入Z:通过人体传感器检测通风柜前扇形区域内是否有人,并将有人/无人状态转换为+12 V/0 V电压值。输出模拟信号为阀门驱动信号,线性变化的电压控制阀门的开度。
2.2 人机界面
包括键盘、LED指示灯和液晶显示器,实现信息的输入,数据显示和报警作用。该电路由PCA9555单元单独完成。PCA9555是24引脚的CM OS设备,它提供了I2C-Bus/SMBus应用中的16位通用并行输入/输出口GPIO的扩展。且通讯频率始终能达到400 kHz.
按键采用低电平中断触发方式。
电源电路实现同一端口AC/DC 24V输入,输出直流土12 V,+5 V和+3.3 V.输入端采用半桥整流电路,实现同一端口同时输入交流或直流电源,适应不同环境需要。整流以后,通过TL2575HV-12IKV单元电路,将电压稳定到+12 V.后继采用电压转化电路产生+5 V和+3.3 V电源。
2.3 ModBus
ModBus串行链路协议是主-从协议,RTU模式在相同波特率下比ASCII模式有更高的数据吞吐量,故采用RTU模式。RTU模式是通过判断时间间隔来区分字符和报文帧的,时长至少为3.5个字符时间的空闲间隔将报文帧区分开。同时,整个报文必须以连续的字符流发送,帧内2个字符之间的间隔小于1.5个字符时间。RTU报文帧如下所示:

ModBus协议规定了20多种功能码,本设计只用到其中几种操作。上位机机发送读保持寄存器(功能码03),写单个寄存器(功能码06)和写多个寄存器(功能码16)3种命令完成对ARM的读写功能。下位机程序负责对上位机命令进行响应并将数据发送回主机。
3 系统运行及实现
系统主要实现信息量的采集、通信、参数设置和信息显示。根据国家通风柜对面风速0.4~0.6 m/s的标准,控制器根据通风柜窗开度Hx,阀门反馈Fb和设定风速Vf计算出阀门控制电压Vout(fx)用以控制风速保持在这一范围内。并且将实际风量L和风速V显示在液晶面板上。计算公式如下式:
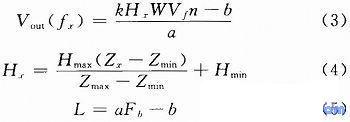
式中:k=0.06~0.42;n=0.6~1.4,为漏风调整;Hmax,Hmin为窗开度的最高和最低位置,Zmax,Zmin为其对应的电压信号;Hx为窗开度的实际值;a,b为阀门开度与风量关系参数,根据现场标定;Fb为阀门反馈电压。
4 结语
此装置包括微控制单元、执行器单元、传感器输入单元、显示单元和操作单元5大部分,使通风柜具有智能化、变风量控制功能。通风量的大小完全由电脑控制,操作简单,保证排出有害气体的效果始终处于最佳状态,不仅能精确地控制排风量,还可以降低能耗、减小噪声,甚至无噪声工作(有多种工作状态)。
实验室污染气体的排放影响到实验人员的健康和工作环境的安全,根据国家对面风速的规定以及考虑到实际运用中环境对风速的影响,本系统还可以推广到别的排风领域。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:基于FH8735视音频编码器的解决方案
下一篇:与机器人对话的语音沟通解决方案
射频和天线工程师培训课程详情>>
