- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
新型光伏电池最大功率点跟踪控制方案
录入:edatop.com 点击:
太阳能光伏电池(简称光伏电池),用于把太阳的光能直接转化为电能。目前地面光伏系统大量使用的是以硅为基底的硅太阳能电池,可分为单晶硅、多晶硅、非晶硅太阳能电池。在能量转换效率和使用寿命等综合性能方面,单晶硅和多晶硅电池优于非晶硅电池。多晶硅比单晶硅转换效率低,但价格更便宜。
按照应用需求,太阳能电池经过一定的组合,达到一定的额定输出功率和输出的电压的一组光伏电池,叫光伏组件。根据光伏电站大小和规模,由光伏组件可组成各种大小不同的阵列。光伏组件,采用高效率单晶硅或多晶硅光伏电池、高透光率钢化玻璃、tedlar、抗腐蚀铝合多边框等材料,使用先进的真空层压工艺及脉冲焊接工艺制造。即使在最严酷的环境中也能保证长的使用寿命。组件的安装架设十分方便。组件的背面安装有一个防水接线盒,通过它可以十分方便地与外电路连接。对每一块太阳电池组件,都保证20年以上的使用寿命。
太阳能电池是通过光电效应或者光化学效应直接把光能转化成电能的装置。以光电效应工作的薄膜式太阳能电池为主流,而以光化学效应原理工作的太阳能电池则还处于萌芽阶段。太阳光照在半导体p-n结上,形成新的空穴--电子对。在p-n结电场的作用下,空穴由n区流向p区,电子由p区流向n区,接通电路后就形成电流。
1 光伏电池模型及输出特性
1.1 光伏电池的数学模型
在光照强度和环境温度一定时,光伏电池既非恒压源,也非恒流源,也不可能为负载提供任意大的功率,是一种非线性直流电源。其等效电路如图1所示。图1中,UJ为PN结电压,Id为光伏电池在无光照时的饱和电流,Id=Io{EU+IRS) nKT-1}。一个理想的太阳能电池,由于串联电阻RS很小,旁路电阻Rsh很大,所以在进行理想电路的计算时,它们均可忽略不计。由图1的太阳能光伏电池等效电路得出:I=Iph-I0[eq(U+IRS) nKT -1]- U+IR R s sh(1)式中,I为光伏电池输出电流;I0为PN结的反向饱和电流;Iph为光生电流;U为光伏电池输出电压;q为电子电荷,q=1.6伊10-19 C;k为波尔兹曼常数,k=1.38伊10-23 J/K;T为热力学温度;n为N结的曲线常数;Rs,Rsh为光伏电池的自身固有电阻。
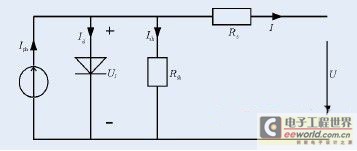
图1 光伏电池等效电路
1.2 光伏电池电气特性
光伏电池的输出特性主要通过I-U和P-U特性曲线来加以体现,如图2所示。
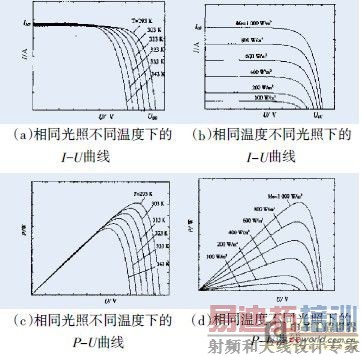
图2 光伏电池的I-U和P-U特性曲线
从图2中可以看出,光伏电池的输出特性曲线与工作环境的光照、温度等因素有着密切的关系,且具有明显的非线性特性,在一定的光照及温度条件下,电池具有唯一的最大功率点,所以为了实现光伏发电系统的输出功率的最大化,需要对光伏电池的输出功率进行最大功率点跟踪。
2 MPPT控制方法的对比分析
MPPT控制器的全称“最大功率点跟踪”(Maximum Power Point Tracking)太阳能控制器,是传统太阳能充放电控制器的升级换代产品。所谓最大功率点跟踪,即是指控制器能够实时侦测太阳能板的发电电压,并追踪最高电压电流值(VI),使系统以最高的效率对蓄电池充电。下面我们用一种机械模拟对比的方式来向大家解释MPPT太阳能控制器的基本原理。要想给蓄电池充电,太阳板的输出电压必须高于电池的当前电压,如果太阳能板的电压低于电池的电压,那么输出电流就会接近0.所以,为了安全起见,太阳能板在制造出厂时,太阳能板的峰值电压(Vpp)大约在17V左右,这是以环境温度为25°C时的标准设定的。这样设定的原因,(有意思的是,不同于我们普通人的主观想象,下面的结论可能会让我们吃惊)在于当天气非常热的时候,太阳能板的峰值电压Vpp会降到15V左右,但是在寒冷的天气里,太阳能的峰值电压Vpp可以达到18V!
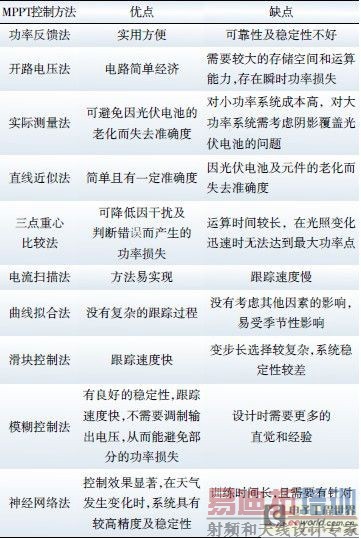
国内外研究MPPT的算法很多,比较成熟的有恒定电压法、扰动观测法/爬山法、电导增量法等。恒定电压法(CVT)就是将光伏电压固定在最大功率点附近,该控制方法简单容易实现,初期投入少,系统工作电压具有良好的稳定性,但是跟踪精度差,忽略了温度对光伏电池开路电压的影响,测量开路电压要求光伏阵列断开负载后再测量,对外界条件的适应性差,环境变化时不能自动跟踪到MPP,造成了能量损失。扰动观测法(P&O)和爬山法(Hill Climbing)都是通过不断扰动光伏系统的工作点来寻找最大功率点的方向,该控制方法控制思路简单,实现较为方便,跟踪效率高,提高太阳能的利用效率,但是扰动观测法或爬山法的步长是固定的,如果步长过小,就会导致光伏阵列长时间地停滞在低功率输出区,如果步长过大,就会导致系统振荡加剧,并且在日照强度变化时会产生误判现象。电导增量法是通过调整工作点的电压,使之逐步接近最大功率点电压来实现最大功率点的跟踪,该方法能够判断工作电压与最大功率点电压的相对位置,能够快速地跟踪光强迅速变化引起的最大功率点变化,控制效果好,稳定度高,但是该控制算法较复杂,对控制系统性能和传感器精度要求较高,硬件实现难。除以上几种常用的MPPT控制方法外,目前不断出现一些较新、较实用的MPPT算法,如直线近似法、三点重心比较法等。这些算法既参考了已有的比较成熟的方法,又在其基础上进行了改进和创新,跟踪精度有了进一步的提高。同时,以模糊控制法、神经网络控制法等为代表的新算法的出现,也为最大功率点跟踪控制技术的快速发展提供了坚实的数学基础和理论依据。对于各种MPPT算法优缺点的比较分析如表1所示。由以上研究分析发现,每种MPPT控制方法各有其优缺点,在实际工作中需要综合考虑,根据不同的环境采用不同的控制方法,既能提高利用效率又能缩小成本。
表1 MPPT控制方法比较
3 改进爬山法研究
考虑到爬山法有较好的跟踪效率,且实现简单等显著优点,本文采用一种改进爬山法,该方法采用CVT启动及变步长的控制策略。CVT启动方法是以0.78倍的开路电压作为爬山法的运行初值,能较好地克服爬山法在启动时产生的采样误差的缺点,能提高跟踪速度。变步长控制法的思想是:当距最大功率点比较远时,步长取较大,跟踪速度加快;当距最大功率点比较近时,步长取较小,慢慢接近最大功率点;当非常接近最大功率点时,稳定在该点工作。该变步长法能克服爬山法在最大功率点附近振荡的缺点。改进爬山法控制流程图如图3所示。
4 改进爬山法仿真分析
光伏发电系统最大功率点跟踪器采用BooST
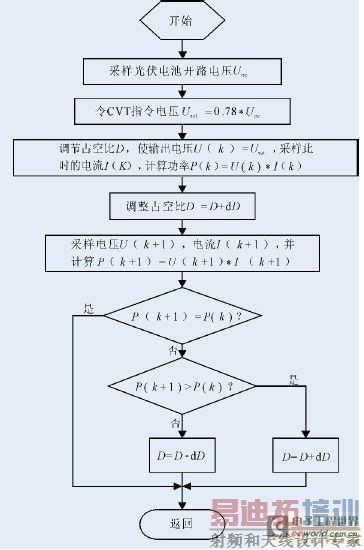
图3 改进爬山法控制流程图
DC/DC变换电路来实现,通过调节PWM波的占空比控制功率的输出。在Boost变换器的电路中串入MPPT控制系统,利用Matlab/simulink搭建仿真模型,编写S函数作为MPPT的控制模块,对光伏电池的最大功率点进行追踪,MPPT仿真模型如图4所示。
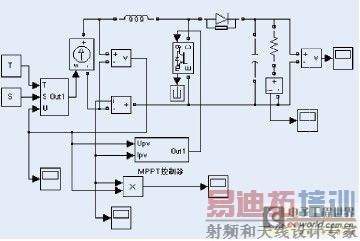
图4 MPPT仿真模型
对短路电流3.2 A、开路电压22 V、最大功率点电流2.94 A和最大功率点电压17 V的光伏电池模块组成17伊1的光伏电池阵列进行仿真,即其短路电流和光伏电池阵列的开路电压分别为3.2 V和374 V,光伏电池阵列最大功率点电流和最大功率点电压分别为2.94 A和289 V。光伏阵列输入光强为1 000 W/m2,温度为25 益。为了形成对比,对不加MPPT控制器的光伏发电系统、加爬山法MPPT控制器的光伏发电系统和加改进爬山法MPPT控制器的光伏发电系统分别进行仿真实验,仿真结果如图5所示。
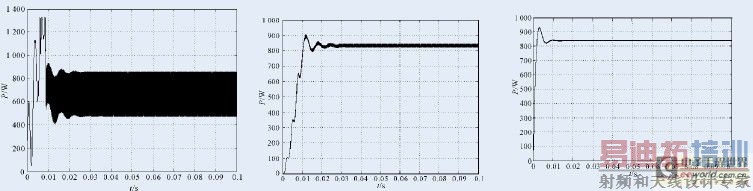
图5 MPPT仿真图形
由图5可见,未加MPPT控制的光伏电池输出功率振荡范围很大,输出功率很不稳定。爬山法MPPT控制系统能较好地跟踪到最大功率点,但是在最大功率点处还有一定振荡。改进爬山法的MPPT控制系统有效地改善了爬山法的缺点,在最大功率点附近振荡小,跟踪速度也比较快,提高最大功率跟踪的效率。
5 结论
综上所述,通过对几种常见的MPPT控制方法的比较研究,可以看出,恒定电压法控制简单且易实现,但跟踪精度差,在外界环境变化时,会产生较大误差;爬山法简单实用、跟踪效率高,但在最大功率点附近会发生振荡,存在误差;电导增量法虽然跟踪快速稳定,但由于实际的光伏发电系统中电压和电流的检测所依赖的传感器精度的有限性,采用电导增量法很难达到预期的最大功率跟踪效果。所以本文采用一种改进爬山法,并对其进行仿真实验,仿真实验证明基于变步长的改进爬山法能够克服爬山法存在的振荡现象和能量的损失,并且结合CVT启动能够更加快速地实现最大功率点跟踪。因此改进爬山法克服了常规跟踪算法中存在的效率低、能量损失大、不稳定等的缺点,可以很好地适应各种场合对光伏系统MPPT控制的要求,是一种较理想的MPPT控制方案。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:车载电源逆变器基础知识
下一篇:电源电站边坡局部垮塌修复措施和控制
射频和天线工程师培训课程详情>>
