- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于电流环复合控制的SVPWM 有源电力滤波器的研究
录入:edatop.com 点击:
1.引言
并联有源电力滤波器(SAPF)是动态补偿三相电力系统中谐波和无功的重要装置,由于电网中的谐波电流成分非常复杂,因此其性能主要取决于谐波电流的跟踪速度及跟踪精度。目前,传统的电流控制算法有滞环控制、PI 控制、无差拍控制等。滞环控制具有较快的动态响应速度,易实现,但开关频率不固定,易造成过大的脉动和开关噪声;PI 控制可以获得固定的开关频率,但其带宽不够宽,对APF 这种谐波给定会存在稳态静差不可消除的缺点;无差拍控制能快速响应电流的突然变化,特别适合快速预测谐波电流的变化趋势,但计算量很大,对预测模型的依赖性较大,因算法复杂导致预测周期增大进而引起较大的预测误差,最终影响补偿效果。
为提高SAPF 的控制性能及对非周期信号的抗干扰性,本文在同步旋转d、q 坐标系系下将直接重复控制进行改进,与传统的PI 控制相结合,组成PI 控制内环,改进重复控制外环的双闭环控制。同时,将SVPWM 控制策略引入控制算法之中,与传统的
SPWM 相比,SVPWM 矢量控制不仅减少了开关器件的开关次数,降低了开关损耗,同时提高了直流电压的利用率,使APF 在较低的直流母线电压下,实现了较好的控制效果。
2.SAPF 旋转D-Q 坐标系下的数学模型及控制方法
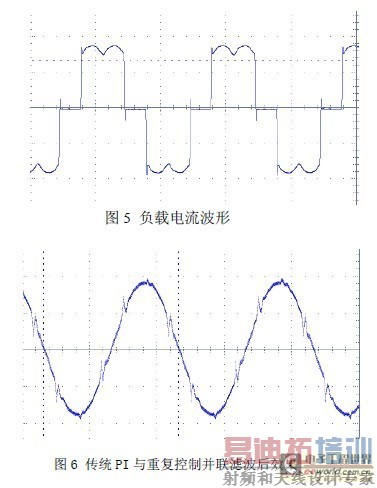
并联型有源电力滤波器的结构图如图1 所示.其中eg 为电网电源,lg 为电网等效漏感;L 为APF 交流侧电感,R 为电感内部等效电阻; 1a i , 1b i , 1c i 是三相负载电流; sa i , sb i 和sc i 是三相电源输出电流; ca i , cb i 和cc i是三相APF 输出电流; a V , b V 和c V 分别是APF 交流侧三相输出电压, dc u 为直流电压。根据图1 可以写出APF 的系统微分方程:

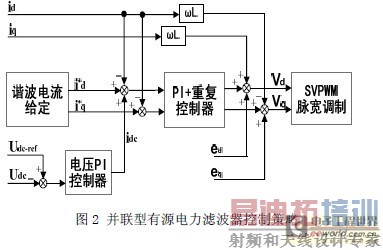
此时,APF 控制策略结构图如图2 所示,包括电流和电压2 个控制环。其中,外环是电压环,采取常规的PI 控制,它的作用是保证APF 的直流电压稳定,使电流内环能够有效地补偿谐波和无功电流。内环是电流环,采用旋转坐标系下结合了PI 和重复控制的复合控制器,它的功能是使APF 输出与谐波源相反的谐波电流。
3.基于重复控制和PI 控制的复合控制策略
3.1 直接重复控制策略
重复控制是一种基于内模原理的控制策略,内模原理指出,系统稳定状态下,精确跟踪任意参考输入信号的前提条件是:闭环控制系统稳定且包含有输入信号保持器。从理论角度看,内模的作用类似无穷大增益的控制信号保持器,当误差衰减到零时,它仍能维持适当的控制作用。对于APF 来说,如果要建立所有谐波信号的内模显然是不现实的,但由于所有谐波信号都是周期性的,而基波周期为谐波周期的整数倍,所以所有谐波信号的周期都可以取成基波周期,这时就可以用重复控制来构造一个基波周期的任意次谐波信号的内模。其内模模型可以用以下公式表示[5][10],
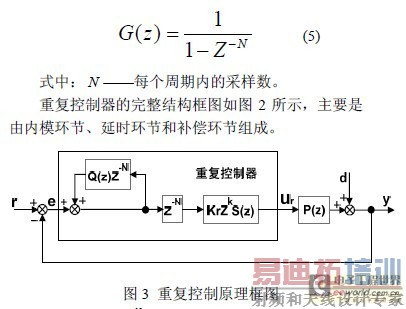
图中,Q( z) Z N 为系统内模,Q(z)为一低通滤波环节或小于1 的常数。周期延时环节Z N 使控制信号输出延时一个基波周期。补偿环节S (z)是根据系统模型P( z)的特性设计的,包括幅值补偿Kr、相位补偿Z k 和用于改善被控对象特性的补偿器S (z)。补偿环节S (z) 的主要目的是在获得了上一周期的误差信号后,在下一周期产生恰当的控制量。

3.2 改进的复合控制
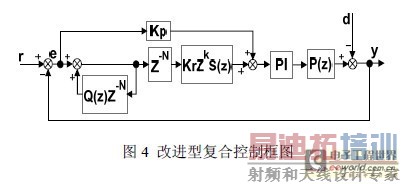
APF 本身输出的就是谐波电流,给定谐波信号又是经过一系列的算法得到的,难免存在非调和的干扰;另外,在实际应用中,电网频率几乎不可能准确地维持在50Hz,例如,若采样频率为fs=10kHz,电网频率f1=50Hz,则一个周期中简单地取N=fs/f1=200 时,当而电网频率不是严格地为50Hz 时,必然会带来非调和 的的干扰,随着时间的推移这样的逐点累加必然会产生错位,造成系统不稳定[2]- [5]。为了减小这种扰动,一种方法就是使C(z)的增益减小,使控制偏差增加减小,但同时带来的问题是导致响应迟缓及稳态精度的下降[11]。本文在C(z)的输出端增加一正比于误差的前馈量,使控制器能更快地响应误差的变化;同时将传统的PI 控制引入控制之中,且由常规的并联复合控制改为串联复合控制,使统的PI 控制不仅在动态时起作用,而在稳态时也可以抑制干扰信号的影响。改进的复合控制框图如图4 所示,PI 控制的引入,可以进一步减小C(z)及Q(z)的增益,使系统具有更强的鲁棒性,由于减小C(z)及Q(z)值而带来的控制精度的下降及响应的迟缓,可以通过增大PI 的P 及前馈K来提高。
3.3 快速空间矢量算法
空间矢量脉宽调制(SVPWM)是把三相变流器的端部电压状态在复平面上综合为空间电压矢量,并通过不同的开关状态形成8 个空间矢量,利用这8 个空间矢量去逼近电压圆,从而形成SVPWM 波。它能在较低的开关频率下获得较好的谐波抑制效果和比SPWM高15%的基波电压,它的另一个优点是易于实现数字和实时控制。
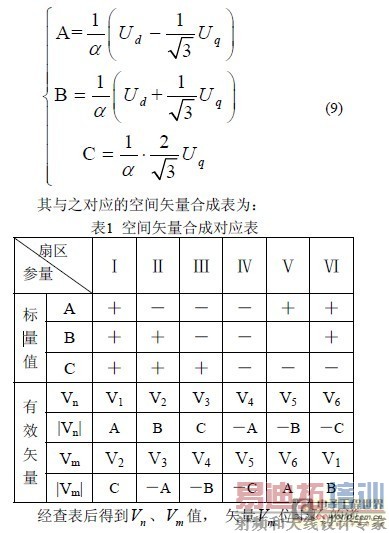
本文在D-Q坐标系下,使谐波参考电流与反馈电流进行比较,经PI+重复双闭环电流控制得到参考电压信号。将D-Q坐标系下的电压参考信号转换到A-B坐标系下,利用非标准正交基基底将其进行矢量分解[8],得到下式A、B、C 3个不同的标量值,可以根据这三个值查表1来确定参考矢量所处的任意区域及相邻的有效基本矢量的幅值:
5 结论
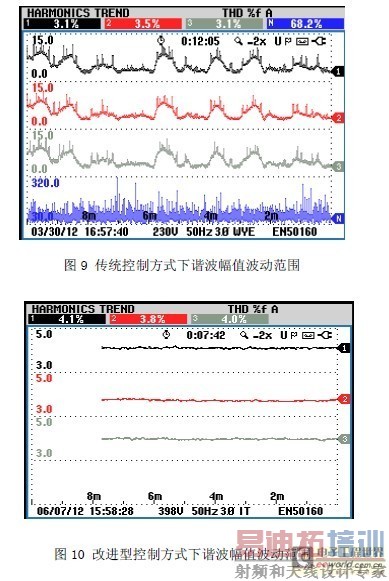
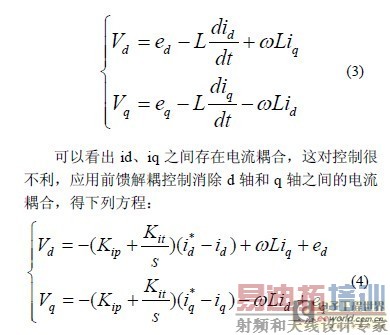
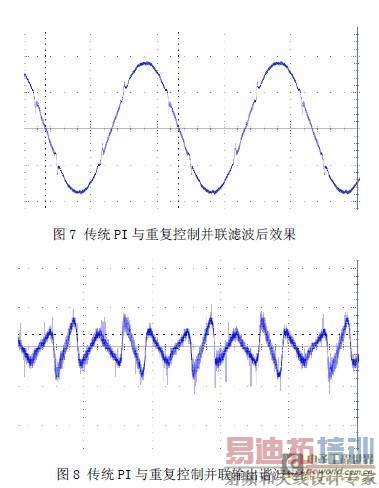
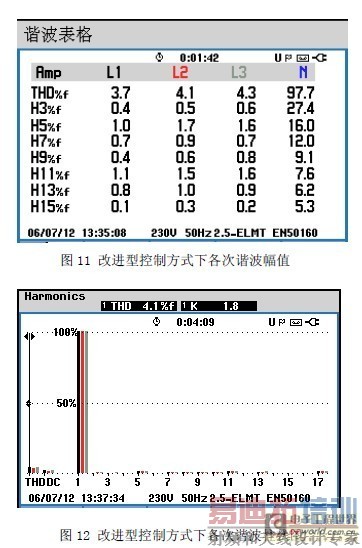
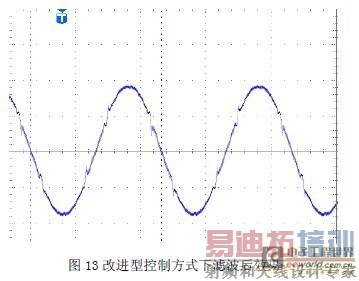
本文在旋转d,q 坐标系中分析了APF 的数学模型,建立了电压、电流解耦环节,对解耦后的d,q 轴电流id,iq 分别进行控制。为了减小非周期信号对控制的影响,在增强由于降低重复控制补偿增益而带来的响应迟缓,提出了改进的重复控制与传统PI 控制相串联的双环控制算法。采用SVPWM 控制策略,在50A样机SAPF 上进行了实验,实验结果表明,改进的控制算法有很强的鲁棒性,能较大程度的较小非周期信号对控制效果的影响。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:水电站直流电源系统接地故障的处理与技巧分析
下一篇:系统介绍开关电源工作原理详解析
射频和天线工程师培训课程详情>>
