- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于嵌入式的机器人系统电路模块设计
录入:edatop.com 点击:
机器人要实现的动作和功能较多,需要多个传感器对外界进行检测,并实时控制机器人的位置、动作和运行状态。系统中的所有任务最终都挂在实时操作系统μC/0S一Ⅱ上运行,因此不仅要考虑微控制器的内部资源,还要看其可移植性和可扩展性。LPC2129是Philips公司生产的一款32位arm7TDMI—S微处理器,嵌入256 KB高速Flash存储器,它采用3级流水线技术,同时进行取指、译码和执行,而且能够并行处理指令,提高CPU的运行速度。由于它的尺寸非常小,功耗极低,抗干扰能力强,适用于各种工业控制。2个32位定时计数器、6路PWM输出和47个通用I/0口,所以特别适用于对环境要求较低的工业控制和小型智能机器人系统。因此选用 LPC2129为主控制器,可以获得设计结构简单、性能稳定的智能机器人控制系统。
无线通信接口设计
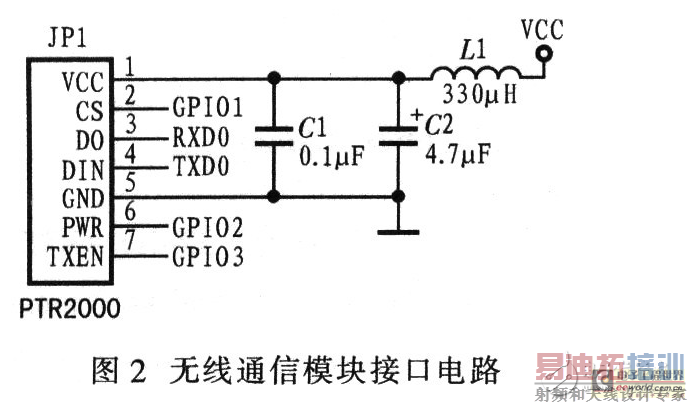
系统采用迅通公司生产的PTR2000无线通信数据收发模块。电路接口如图2所示。该模块基于NORDIC公司生产的射频器件nRF401开发,其特点是:①有两个频道可供选择,工作速率高达20 Kb/s;②接收发射合一,适合双工和单工通信,因而通信方式比较灵活;③体积小,所需外围元件少,接口电路简单,因此特别适合机器人小型化要求;④可直接接单片机串口模块,控制简单;⑤抗干扰能力强;⑥功耗小,通信稳定。
超声波测距传感器设计与实现
两路超声波传感器用以控制机器人避开障碍物,并预测机器人相对目的地距离,起导航作用,其接收部分与微控制器的捕获和定时管脚相连接。整个超声波检测系统由超声波发射、超声波接收和单片机控制等部分组成。发射部分由高频振荡器、功率放大器及超声波换能器组成。经功率放大器放大后,通过超声波换能器发射超声波。
图5给出由数字集成电路构成的超声波振荡电路,振荡器产生的高频电压信号通过电容C2隔除掉了信号中的直流量并给超声波换能器MA40S2S。其工作过程:U1A和UlB产生与超声波频率相对应的高频电压信号,该信号通过反向器U1C变为标准方波信号,再经功率放大,C2隔除直流信号后加在超声波换能器MA40S2S进行超声波发射。如果超声波换能器长时间加直流电压,会使其特性明显变差,因此一般对交流电压进行隔除直流处理。U2A为 74ALS00与非门,control_port(控制端口)引脚为控制口,当control_port为高电平时,超声波换能器发射超声波信号。

图6示出为超声波接收电路。超声波接收换能器采用MA40S2R,对换能器接收到的信号采用集成运算放大器LM324进行信号放大,经过三级放大后,通过电压比较器LM339将正弦信号转换为TTL脉冲信号。INT_Port与单片机中断管脚相连,当接收到中断信号后,单片机立即进入中断并对超声波信号进行处理和判断。

光电检测模块设计
设计光电检测模块,使机器人能够检测地面上的白色引导线。光电检测电路主要包括发射部分和接收部分,其原理如图3所示。发射部分的波形调制采用了频率调制方法。由于发光二极管的响应速度快,其工作频率可达几兆赫兹或十几兆赫兹,而检测系统的调制频率在几十至几百千赫兹范围之内,因此能够满足要求。光源驱动主要负责将调制波形放大到足够的功率去驱动光源发光。光源采用红外发光二极管,工作频率较高,适合波形为方波的调制光发射。
接收部分采用光敏二极管接收调制光线,将光信号转变为电信号。这种电信号通常较微弱,需进行滤波和放大后才能进行处理。调制信号的放大采用交流放大形式,可以将调制光信号与背景光信号分离开来,为信号处理提供方便。调制信号处理部分对放大后的信号进行识别,判断被检测对象的特性。因此,该模块的本质是将“交流”的、有用的调制光信号从“直流”的、无用的背景光信号中分离出来,从而达到抗干扰的目的。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:基于555定时器的D类耳机驱动实用放大电路设计
下一篇:一款双通道输出电源电路设计
射频和天线工程师培训课程详情>>
