- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
采用STC89C52单片机水陆两栖救灾车系统电路模块设计
录入:edatop.com 点击:
传统的救灾车对路面的要求比较高,该文提出并设计了一种水陆两栖的救灾车。该文主要使气垫船与轮式车辆相结合,选择STC89C52单片机,通过红外避障技术的相关知识,实现了水陆两栖的救灾车的设计。通过实践证明,车在行驶时,具备避障、防撞功能,完成了救灾的功能。该小车由路面行进至水中时,通过水检测装置检测水位,当水深达到一定高度时,小车可以自动实现水陆两栖转换功能。当声源散发出声音时,由小车周围的声音传感器根据接收的声响,判断其具体的方向,缓缓向声源靠近。当水上模式时,该小车可收起车轮;当由陆地转换成水上时,动力由车轮转换为涡轮驱动。
声音模块
本文的声音模块主要利用震动的规律来设计,其模块电路图如图2所示。
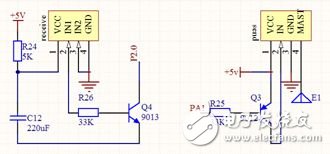
图2 声音模块电路图
驱动模块
直流电机在调速方面具有广泛的应用。因其过载能力强,范围广,调速便利,能快速实现启动、反转和制动。因此,选用L293D这个芯片放在电机驱动上,该芯片由TTL电平操控,因而操作简便。有两种方法可供选择:
方法一:通过舵机来控制小车的转向,用直流电机进行驱动控制。舵机控制转向时,无法控制前进,倘若保证转弯的同时前进,那么它必须有大功率支持,因而电源的要求较高。此外,舵机的转向既平缓又灵活,但转向弧度较大,以致于无法原地转向,费用很高。
方法二:选择双直流电机来控制驱动和转向,它的动力很强劲。通过电机差速的原理来控制转向的问题,较易达到沿任意角度进行转向的功能,因此选取方法二。电机控制的原理图如图4所示。

图4 电机控制原理图
本文提出并设计了一种水陆两栖的救灾车,结合气垫船与轮式车辆,选择STC89C52单片机,通过红外避障技术的相关知识,在路况不好,车胎打滑、悬空等条件下,能够实现自救,这样之后实现了水陆两栖的救灾车的设计,可以自动实时监测,从而保证及时救灾,进而保障了人们的财产以及生命安全。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
天线设计工程师培训课程套装,资深专家授课,让天线设计不再难...
上一篇:LM4912左、右双声道的放大电路
下一篇:探究低成本解码差分视频接收器系统电路
射频和天线工程师培训课程详情>>
