- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于XC164CM的车灯控制系统的设计与实现
录入:edatop.com 点击:
在现代行车安全系统中,车灯控制系统有着重要的作用。据资料记载,交通事故大部分发生在夜间或恶劣天气下,而在这些交通事故当中,大部分是由于车灯控制系统不能及时满足安全需求所造成的,例如传统车灯亮度单一,视距较短,不能随外界环境的变化自动调节亮度和模式,有时会造成能源浪费,有时又不能满足照明需求等。因此,设计更实用、更智能的车灯控制系统已经成为当务之急。
本文研制的车灯控制系统,采用发光亮度高、反应速度快、耐恶劣环境、工作性能可靠的LED灯,提高灯光亮度和视角范围,减小安全车距,有效地改善了行车安全性能。本系统应用了传感器技术、微处理器技术、电子电路技术和CAN总线技术,对环境亮度和行车状况实现精确感测和判断,并根据行车需要自动选择合适的照明模式,从而实现了车灯的自适应控制。该控制器能有效地辅助驾驶员行车,减轻驾驶员的操作负担,最大限度的避免了人为因素导致的违章使用灯光,从而达到了减少交通事故的目的。
1 车灯控制系统
1.1 系统工作原理
该系统通过外置的传感器感测环境亮度强弱和控制板温度,将其转化为光敏和热敏电阻的分压信号及LED驱动分压信号,并由单片机AD模块进行采集。
单片机根据事先划分好的等级对AD转换后的数字信息进行分析归类,判断出汽车当前所处的行车环境(白天、雨雾天气、户外傍晚或深夜、会车、隧道等),再与内置的特征参数进行对比和开关扫描后自动选择灯光亮度和行车模式。根据选定的参数,由XC164CM输出相应的PWM信号来调节车灯的亮度。
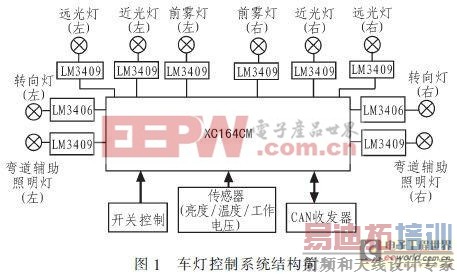
车灯当前所处的状态可以通过CAN总线接口发送到上位机,上位机也可以发送调整信息改变车灯的状态,从而实现了人机交互功能。系统结构如图1所示。
 1.2 系统功能设计
1.2 系统功能设计
文中设计的LED车灯控制系统主要完成了以下几个功能。
1.2.1 亮度自适应调节
将外界的环境亮度分为3个等级:明亮(晴天户外等),昏暗(户外阴雨,户外傍晚,隧道,停车场等室内场所),漆黑(户外深夜或其他类似场合)。系统可以根据当前环境的亮度等级自动调整车灯的亮度,以满足不同情况下的照明需求。车灯亮度分为4级、6级、8级亮度,其中4级最暗,8级最亮,6级居中。车灯亮度的调节策略如下:
1)当环境亮度增强时,信号灯的亮度增强;环境亮度减弱时,照明灯的亮度增强。
2)由于将车灯亮度瞬间降低具有一定的危险性,所以在降低车灯亮度时,需做两次判断:在环境亮度增强时,照明灯的亮度并不立即减弱,而是继续等待一个周期,若环境亮度保持在较低的值没有变化,再将照明灯调暗;在环境亮度减弱时,对信号灯采取同样的操作。
1.2.2 状态监控及过温保护
实时监控驱动器输出到LED灯的电压并将结果通过上位机显示。LED灯定义为3种状态:故障态、关闭态、工作态,这3种工作状态由LED灯当前工作电压和开关状态区分。过温保护是通过实时监控驱动器工作温度实现,当驱动器环境温度值超过80度时,产生过温提示信号,以提示选取温控模式(驱动输出降额允许)。
1.2.3 人机交互
控制系统通过XC164CM单片机自带的CAN总线接口与上位机CAN接收器连接,实现与上位机信息的交互。上位机不仅可以查询和获取车灯的工作状态数字量(故障态、关闭态或亮度级),还可以发送控制命令调整车灯的亮度以及是否进入智能照明模式,从而实现人机交互。
2 硬件设计
硬件主要由单片机控制模块,传感器模块,CAN总线模块和LED驱动模块四部分组成。
2.1 XC164CM单片机简介
XC164CM单片机是Infineon公司推出的采用低功耗CMOS工艺生产的增强型16位单片机,其主要特点有:1)采用C166SV2内核;2)内部集成大容量的存储器;3)带自校检的14路A/D转换器;4)两个比较,捕获单元,可方便地产生PWM波;5)Twin CAN模块,可通过网关交换数据。
2.2 传感器装置
环境亮度的采集由3组位于不同位置(前部、侧身、顶部)的亮度传感器完成。其中亮度传感器为安装在感光位置的光敏电阻GM5528(亮电阻10~20 kΩ,暗电阻1 MΩ,响应时间20~30 ms),GM5528通过分压电路输出的电压值随着环境亮 [p] [p] 环境亮度进行比较,并根据比较结果对亮度进行相应调整。具体调整策略在2.2节中。
5)过温保护:对采样的温度结果进行比较判断,若温度超过80度,首先产生一个过温提示信息,提示控制系统进入降额应用,将降额标志位置1,驱动器功率减半,随后将降额标志位归零。
6)状态数字量更新:首先,对AD采样结果做归一化处理,将驱动器电压信号的转化结果与测定的工作电压范同比较,超出范围的认定为故障态,生成状态位101,否则使用亮度级寄存器的值作为状态位。其次,将得到的状态位与开关寄存器值相与(开关寄存器取值表:开启为1,关闭为0)得到最终状态位。最后,状态位与驱动器标志位形成状态数字量,并将其放入CAN发送缓冲区。3.3 CAN接收中断子程序
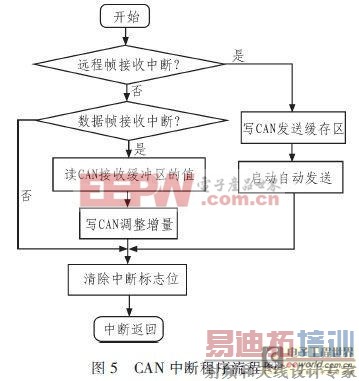
1)CAN总线接口正确接收信息后,置位中断标志位,进入接收中断服务程序。
2)判断中断是否为远程帧中断,是则将状态量信息写CAN模块发送缓存区,并启动自动发送;否则进一步判断是否为数据帧接收中断。如果是数据帧接收中断,则读CAN接收缓存区的值并将其写入CAN调整量。最后清除相应的标志位,返回到主函数。流程图如图5所示。
4 结论
文中设计了基于XC164CM单片机的高端车用灯光控制模块,该模块不仅完成了对每个车灯的亮度控制,而且可实现对每个车灯的状态检测。汽车灯光控制模块的工作过程是一个不断循环的检测过程,通过对比前后两次的检测结果对亮度信息不断更新,再根据更新的亮度信息来调节车灯亮度,从而实现了灯光的亮度自适应调整。在实验过程中,选用LED5050白灯作为车灯实验灯,并配以车灯罩,制成车灯模拟演示板。在车灯负载和单片机接口之间由自主研发的实验电路连接,并在实验电路上设置6路开关,实现对10路车灯的接通、断开控制。实验结果证明,本系统性能稳定,实现了设计的所有功能,并可以正确返回结果。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
