- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
并网光伏微型逆变器设计
录入:edatop.com 点击:
本应用参考设计简略描述了单级并网太阳能(PV)微型逆变器主要原理。
本设计主要使用了一颗ST公司的STM32F4系列处理器,该处理器是基于ARM1Cortex -M4内核具有浮点运算,168MHZ的高速处理能力,增强的单周期DSP处理指令。可以进行一些复杂的计算。控制PV电池板流向电网的功率。此处理器还执行MPPT算法、故障控制,以及可选的数字通信程序。而前级使用了宽范围输入的反激DC-DC来产生与电网同相和同步的正弦输出电压和电流。
此微型逆变器的设计目标是可连接到这样的PV模块:
在22VDC至50VDC的输入电压范围内,可输出最大200W的功率,最大开路电压为55VDC。
本设计的要求如下所列:
▲最大输出功率=185W
▲标称输出电压=230V
▲标称输出电流=0.8A
▲输出电压范围=180VAC-264VAC
▲标称输出频率=50Hz
▲输出频率范围=48Hz-52Hz
▲功率因数=>0.96
▲总谐波失真=5%
▲最大效率=96%
▲最大功率点追踪=99.5%
▲最小效率>0.8
并网光伏微型逆变器参考设计的框图如图1所示。

本系统主要分7大块,PV组件、辅助电源、光伏微型逆变器、EIM滤波、STM32F4、LCD显示与键盘。这里最主要的是,光伏微型逆变器和STM32F4所以本应用设计主要对这两块做主要介绍。光伏微型逆变器硬件架构
光伏微型逆变器,如图1所示主要分两大块,前面是DC/DC升压及MPPT后面是DC/AC桥式换向。
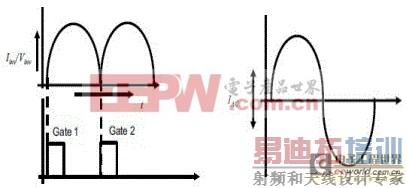
微逆变器电路工作原理:
把半波的直流电压通过四个可控硅进行换向,变成了上下波的交流电压。通常专用术语把此半波称为馒头波,如图2微逆变的工作原理波形变换图:
由交错反激构成的微逆变器硬件框图,如图3:
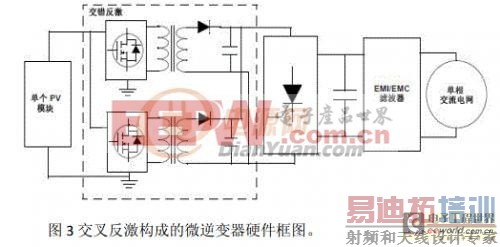
微逆变器的主要原理:
如图3主要有两块组成,交错反激电路和桥式换向电路。
交错反激电路主要功能:
如图3虚线框内,来自PV的低压直流电,经交错反激电路升压到最高400V左右的峰值电压,然后在电容上形成具有正弦特性的直流半波电压。也叫馒头波,如图2。
桥式换向电路:
四个可控硅接成的桥式电路,把半波的直流电压,变成上下变换的交流正弦波,桥式可控硅的换向频率工作在低频50HZ波形图如图2。SCR桥式框图如图3A: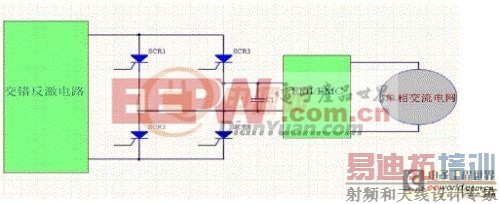 光伏微型逆变器软件架构
光伏微型逆变器软件架构
本并网太阳能微型逆变器参考设计由单个STM32F4器件控制,如图4光伏微型逆变器框图
中的系统框图所示。

STM32F4器件是此光伏微型逆变器设计的核心,控制着系统的所有关键操作以及后台处理。STM32F4的功能主要分以下5类:
▲ 多工作模式的微逆变器的状态机
▲ 最大功率算法(MPPT)
▲ 数字锁相环(PLL)
▲ 系统孤岛检测与故障处理
▲ 功率转换
此光伏微型逆变器软件结构的高级别框图如图5所示,此软件主要分为两部分:
▲界面软件
▲光伏微型逆变状态机
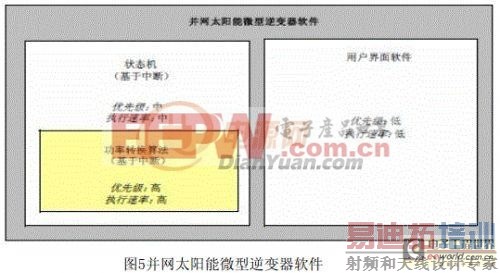
软件架构
此并网光伏微型逆变器软件实现了状态机来确定系统的工作模式。状态机在定时器中断服务程序(ISR)内每隔100μs执行一次。状态机对片上外设进行配置以执行正确的功率变换算法。当系 [p] 统刚开启时,状态机会检查所有的输入和输出条件以及故障。如果输入和输出在指定范围之内且没有故障,则系统状态机会将系统切换到启动模式。然后状态机会在启动模式下再次检查系统条件,并将所有必需的变量和外设初始化以开始正常模式工作,然后切换到白天模式(DAY_MODE)。如果电网出现故障,状态机会将系统状态切换到系统错误(SYSTEM_ERROR)模式,而如果电网状态良好但PV电池板电压没有在指定限值内,状态机会将系统切换到晚上模式(NIGHT_MODE)。
系统状态初始化
当太阳能微型逆变器开启时,系统会进入初始化程序,将其所有外设、变量和常量初始化。系统的状态将初始化为系统启动状态。状态机首先监视所有系统变量和输入输出的状态。如果检测到任何故障,它会检查:
电网电压条件
电网频率条件
逆变器输出交流电流条件
PV电池板电压条件
反激MOSFET电流条件
以下部分将描述本参考设计的每一种工作模式。
图6显示了本参考设计的软件状态图:
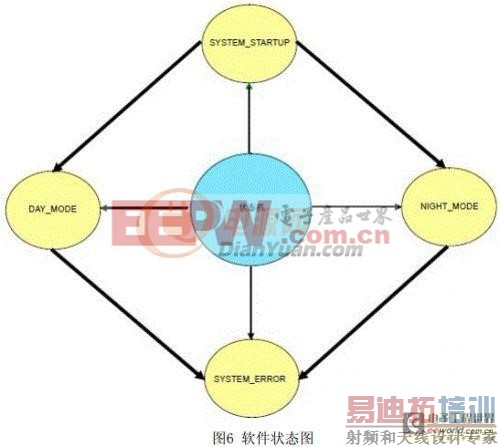 本状态结构总共有四个状态,分别是
本状态结构总共有四个状态,分别是
系统启动状态SYSTEM_STARTUP
系统错误状态SYSTEM_ERROR
白天模式 DAY_MODE
黑夜模式 NIGHT_MODE
▲SYSTEM_STARTUP
如果上面描述的任一条件没有在指定限值之内,则状态机会将系统状态切换到SYSTEM_ERROR模式。如果所有条件均在指定限值范围之内,状态机将首先计算输入PV电压和输出电网电压及其频率然后设置ss_Flag系统启动标志以启动系统使其正常工作。它会重新初始化所有必需的控制环变量,以确保在PWM初始切换期间的可靠工作。在将所有必需的控制环变量初始化之后,系统状态会切换到DAY_MODE工作模式。在以SYSTEM_STARTUP模式工作期间,系统会持续检查指定的所有条件。如果其中有任一条件未满足,则会切换到SYSTEM_ERROR工作模式。
▲SYSTEM_ERROR
如果发生以下任一情况,则系统状态会切换到此SYSTEM_ERROR模式
电网欠压~180VAC
电网过压>~270VAC
电网频率>55Hz或45Hz
反激MOSFET过流
逆变器输出电流峰值>3A
一旦系统切换到SYSTEM_ERROR状态,它会重新检查前述条件以避免错误的SYSTEM_ERROR触发。一旦系统确认错误确实存在,则会继续处于安全工作模式。随后系统会停止PWM模块,并将ADC触发源更改为Timer1。在SYSTEM_ERROR工作模式期间,系统状态机会持续检查输入和输出电压条件。如果故障消除,并且PV电池板电网电压以及电网电压的频率都在指定限值之内,则系统会切换到SYSTEM_STARTUP工作模式,以稳妥地开启太阳能逆变器并开始向电网馈送可用能量
▲DAY_MODE
DAY_MODE是正常工作模式。在太阳能逆变器正常工作期间,状态机会对系统外设进行配置以执行由系统状态确定的正确的功率转换算法。在该模式下,太阳能微型逆变器将来自PV电池板的最大可用能量传送到单相电网。器件的ADC外设由PWM触发,以对所有的模拟反馈信号进行采样。PLL产生与电网电压同相且同步的正弦电流参考。MPPT控制环计算参考电流输出的电流幅度,以确保逆变器系统馈送来自PV模块的最大可用能量。如果这些条件中的任一条件未满足,则系统状态机将切换到SYSTEM_ERROR状态。
▲NIGHT_MODE
如果并网PV电池板可提供的能量不足(功率25W)或PV电池板电压不在指定限值之内,则系统状态会切换到NIGHT_MODE。在此工作模式下,系统会停止向电网馈送任何能量,并关闭所有PWM开关同时将ADC触发选项从PWM切换到Timer1,以将ADC触发速率保持为与DAY_MODE模式下相同。这样,就可以持续监视所有反馈信号,并检查前述所有的系统输入输出条件及故障。如果出现任何故障或电网电压超出指定限值,则系统会切换到SYSTEM_ERROR模式。并网太阳能微型逆变器控制系统包括以下控制环:
数字锁相环(PLL)
MPPT控制环
电流控制环
负载平衡控制环
并网电网同步锁相环PLL

在连入电网的系统中,转换器控制系统的关键元件是PLL,它产生电网电压的频率和相位角以便控制输出与电网同步。PLL产生的电网电压的估计频率ωe和相位角θe不仅可通过合成或转换用于控制和信号生成,还可用于提供保护,以检测转换器何时进入了孤岛模式。因此,可将PLL系统准确并且尽快地同步到这些电网参数至关重要;否则,可能会导致对功率因数角度、谐波 [p] 的控制和对系统工作模式的确定变得不准确且存在潜在危害。并网太阳能微型逆变器的PLL采用了对电网电压的硬件过零检测和软件过零检测。在软件中,会在每个ADC触发器处对电网电压进行采样,并将电网电压的极性存储在寄存器中。每次采样时均会检查电网电压的极性。如果电网电压的极性发生了变化,软件会设置零电压检测标志。周期计数寄存器会存储两次过零检测之间发生的中断总数。随后周期计数寄存器的值给出电网电压周期值的一半,因为软件中两次中断间的时间是固定的,且从不改变。周期值决定了正弦表中正弦表参考生成的相位角增量。正弦表由512个用于产生0-90度正弦参考的元素组成。90-180度的正弦波形是0-90度波形的镜像。因此,会产生与电网电压同相和同步的0-180度半正弦参。MPPT控制环
通常使用两种算法来追踪MPPT:扰动观察法(PO)和增量电导法(IncCond)。此设计使用PO法来进行MPPT。图39提供了PO算法的控制流程图。MPP追踪器通过将太阳能阵列的电压定期增大或减小来工作。如果给定扰动导致PV输出功率增大(减小),则会在相同(反)方向上产生后续扰动。在图8中,设置MPPT参考表示对太阳能阵列电压的扰动,而MPPTref+和MPPTref-分别代表相同或相反方向上的后续扰动。设定的MPPT参考决定了由PLL产生的正弦参考电流的峰值。
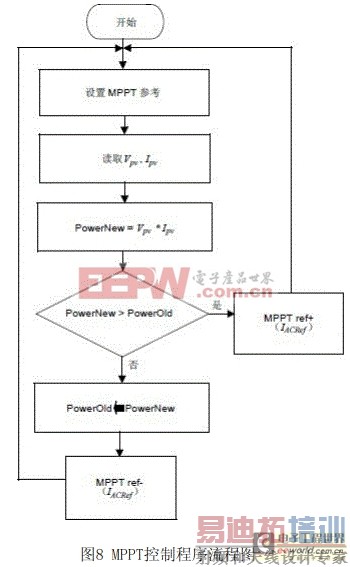
如图8中所示,MPPT点之后PV输出电流的略微增加会导致PV输出电压降低一半,所以PV输出功率也会降低一半。因此,会在电网电压的每个过零处持续检查PV电压,并将该值与PV电压的前一个过零采样相比较。如果PV电压之差大于40mV,则MPPT算法会降低输出电流参考的幅度并且会将从PV电池板获取的功率保持在更靠近PV特性曲线的MPP的工作点处。
电流环
电流控制环是一个比例积分(PI)控制器,是控制系统的核心。此控制环可校正如下两个电流之间的误差两个电流是电流控制环的输入:
参考电流信号(IACREF)
输入电流(IAC)
电流控制环的输出是一个控制信号,用以确保输入电流(IAC)跟随参考电流(IACREF)。电流控制环以57kHz的频率执行,且开关频率为172kHz时的带宽为2500Hz。电流控制环的输出决定了开关MOSFET所需的占空比(D)。负载平衡控制环
如图9为交错反激电路图
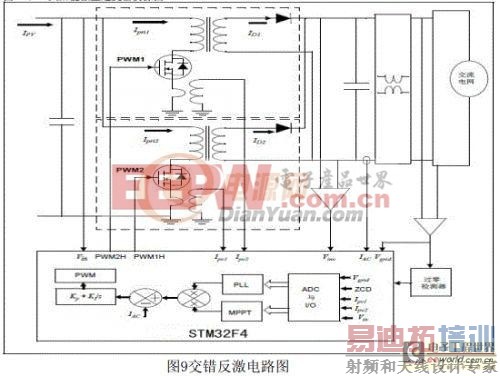
如图9所示反激交错采用了两个MOS管,两个变压器交错工作来实现电路功能,由于两个MOS管的内阻及变压器绕组,电容和二极管内阻都不可能相同,所以会出出现两个反激转换器的输出电压会不同。因此,当两个MOSFET使用相同的占空比时,可能会导致两个反激转换器级之间负载不均衡。这就需要采用负载平衡控制环来平衡两个反激转换器开关中的电流,以便使两个转换器的负载均衡。在硬件电路上使用了STM32F4定时器1的两路PWM分别控制两个管子的交错工作。
负载平衡控制环的其中一路输入是两个反激转换器的MOSFET电流之差(Ipv1-Ipv2)。另一个输入作为此控制环的参考输入,其值固定为零。此控制环主要用于校正MOSFET电流之间的差异,使其接近参考输入值零。负载平衡控制环的输出是一个占空比校正项(ΔD),该项与主占空比D相加得到第一个升压转换器的占空比D1。从主占空比D中减去ΔD项可得到第二个升压转换器的占空比D2。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>
